# Your Reward Function for RL is Your Best PRM for Search: Unifying RL and Search-Based TTS
**Authors**: Can Jin, Yang Zhou, Qixin Zhang, Hongwu Peng, Di Zhang, Zihan Dong, Marco Pavone, Ligong Han, Zhang-Wei Hong
Abstract
Test-time scaling (TTS) for large language models (LLMs) has thus far fallen into two largely separate paradigms: (1) reinforcement learning (RL) methods that optimize sparse outcome-based rewards, yet suffer from instability and low sample efficiency; and (2) search-based techniques guided by independently trained, static process reward models (PRMs), which require expensive human- or LLM-generated labels and often degrade under distribution shifts. In this paper, we introduce AIRL-S , the first natural unification of RL-based and search-based TTS. Central to AIRL-S is the insight that the reward function learned during RL training inherently represents the ideal PRM for guiding downstream search. Specifically, we leverage adversarial inverse reinforcement learning (AIRL) combined with group relative policy optimization (GRPO) to learn a dense, dynamic PRM directly from correct reasoning traces, entirely eliminating the need for labeled intermediate process data. At inference, the resulting PRM simultaneously serves as the critic for RL rollouts and as a heuristic to effectively guide search procedures, facilitating robust reasoning chain extension, mitigating reward hacking, and enhancing cross-task generalization. Experimental results across eight benchmarks, including mathematics, scientific reasoning, and code generation, demonstrate that our unified approach improves performance by 9% on average over the base model, matching GPT-4o. Furthermore, when integrated into multiple search algorithms, our PRM consistently outperforms all baseline PRMs trained with labeled data. These results underscore that, indeed, your reward function for RL is your best PRM for search, providing a robust and cost-effective solution to complex reasoning tasks in LLMs. footnotetext: ‡ Equal advising, Correspondence to: Can Jin <can.jin@rutgers.edu>, Tong Che <tongc@nvidia.com>.
1 Introduction
Recently, test-time scaling (TTS) has been explored as an effective method to enhance the reasoning performance of large language models (LLMs) [52, 20, 62, 49, 85, 74, 30, 28, 27]. Specifically, reinforcement learning (RL) methods [52, 20, 60] and search strategies such as Monte Carlo Tree Search (MCTS), beam search, and Best-of-N sampling have been adopted to support TTS on complex reasoning benchmarks [85, 83, 82, 62, 76]. Notably, OpenAI’s o -series models [52] and DeepSeek-R1 [20] demonstrate that large-scale RL training can lengthen and refine the chains of thought (CoT) produced at inference time. The RL training of LLMs is generally guided by outcome reward models (ORMs) [9, 20, 78] and process reward models (PRMs) [35, 37, 68, 69, 60], which provide supervisory signals to improve model performance.
Although DeepSeek-R1 achieves strong TTS performance using only ORMs or rule-based rewards during RL training [20], sparse outcome rewards often degrade training stability and sample efficiency [12, 37, 79, 6]. Search-based TTS methods that use static PRMs trained on labeled step-wise datasets can guide test-time search and improve reasoning performance, but building fine-grained PRMs that score each intermediate reasoning step requires extensive human annotation or LLM–generated pseudo-labels [69, 37, 12]. Furthermore, distributional shifts between a fixed PRM and the continually updated policy can lead to reward hacking [47, 16, 3], thereby undermining the stability and effectiveness of the policy model. Additionally, the reward hacking can also limit the effectiveness of PRMs in search-based TTS, where the PRM serves as a verifier during test-time search.
In this paper, we investigate how to effectively combine RL-based and Search-based TTS in complex reasoning. Specifically, to reduce the cost of training high-quality PRMs and alleviate reward hacking risks from static PRMs trained on separate datasets during test time search, we propose AIRL-S , a framework that integrates adversarial inverse reinforcement learning (AIRL) [14, 13] with group relative policy optimization (GRPO) [12, 20] to support long CoT reasoning in LLMs through both RL-based and search-based TTS. During training, AIRL learns a step-wise PRM from the reference rollouts. The policy model is then updated using the combined objectives of the dense rewards in AIRL and the binary outcome rewards in GRPO. During inference, the PRM naturally serves as a verifier that guides the search procedure, extending the reasoning of the policy model. AIRL-S enables the training of generalizable PRMs without requiring any labeled process reward data, thereby significantly reducing the cost of constructing dense reward models and mitigating reward hacking under distributional shift. Furthermore, the PRM is theoretically invariant to environmental dynamics [14], allowing it to be reused during inference across different datasets and policy models in search-based TTS.
We evaluate the effectiveness of the LLM policy and the PRM trained with AIRL-S on eight standard reasoning benchmarks spanning mathematics, science, and code generation. The policy model achieves an average performance improvement of 9% over the base model and matches GPT-4o across these tasks. When combined with search-based TTS methods, the PRM surpasses PRMs trained on labeled process data across multiple policy models and datasets. We further pair the PRM with widely used test-time search algorithms to demonstrate its compatibility and effectiveness under varied TTS configurations. Overall, AIRL-S provides an effective and cost-efficient approach for scaling test-time computation in LLMs for complex reasoning tasks.
2 Related Works
Inverse Reinforcement Learning.
Inverse reinforcement learning (IRL) [1, 58, 14, 13, 40, 41] aims to recover reward functions from expert demonstrations, enabling subsequent policy training through standard RL methods. Classic IRL methods include maximum-margin IRL [1, 58] and probabilistic maximum-entropy IRL [87, 86]. Adversarial IRL (AIRL) [14] reformulated IRL into a GAN-style adversarial game [18], improving generalization and theoretical grounding. Subsequent advances have further streamlined IRL: IQ-Learn optimizes inverse soft- $Q$ functions without explicitly modeling rewards [17]; Inverse Preference Learning uses offline pairwise preferences to avoid explicit reward modeling [21]; "IRL without RL" reframes imitation as supervised regression over trajectory data [65]. Our method leverages AIRL’s disentanglement of reward and policy, extending it to RL for large language models (LLMs) and producing a generalizable reward function suitable for guiding test-time search.
RL for LLMs.
Reinforcement learning from human feedback (RLHF) is standard for aligning LLM outputs with user intent [8, 54]. Nonetheless, many open-source reasoning improvement efforts still rely on imitation learning from curated Chain-of-Thought (CoT) datasets [80, 81, 84, 49, 29, 42, 43, 66]. Recent large-scale RL methods using sparse outcome rewards, such as OpenAI o1 [53] and DeepSeek-R1 [20], have achieved significant gains. Specialized RL frameworks for mathematical reasoning, such as Math-Shepherd [69] and DeepSeek-Math-7B-RL [12], utilize dense supervision or extensive RL training to match larger models. Concurrently, PRIME [11] employs "free process rewards" [61] to implicitly derive a token-level process reward from log-likelihood ratios between two LLMs. PRIME is closely related to our work, sharing the fundamental insight of utilizing an implicitly learned reward function from RL training. However, PRIME differs crucially by:
- Employing per-token rewards derived from log-likelihood ratios, which reward-guided generation literatures (discrete GANs, human preference modeling, generation quality evaluation etc) [50, 57, 39] suggests is much less effective than our holistic step-wise discriminators.
- Producing a policy-dependent reward function unsuitable for training new policies or guiding external search procedures.
In contrast, our AIRL-based framework yields an actor-independent reward function capable of both optimal policy recovery (as shown theoretically in AIRL [14]) and direct use as a PRM for guiding search algorithms across different LLMs.
Test-Time Scaling.
Test-time scaling (TTS) methods enhance reasoning capabilities of fixed LLMs by allocating additional inference-time computation. Parallel TTS approaches aggregate independent samples to improve outcomes [4, 25, 70, 83]. Methods such as Self-Consistency [70], Best-of-N sampling [5, 62], and Beam Search [76, 62] utilize diversity-driven strategies for output selection. Monte-Carlo Tree Search (MCTS) integrates lookahead search guided by learned PRMs, achieving strong reasoning performance [83, 85, 82, 75, 55, 73]. Sequential TTS refines outputs iteratively based on previous attempts [49, 62, 44]. Our work integrates the AIRL-trained PRM directly into popular TTS methods, including MCTS, Beam Search, and Best-of-N sampling, demonstrating superior performance compared to static PRMs trained from labeled data.
3 Method
Our objective is to learn a generalizable step-wise PRM that benefits both RL training and test-time search, thereby improving the reasoning accuracy of LLMs. We adopt AIRL and GRPO to train the PRM and the policy model jointly. The learned PRM then guides the search procedure of the policy LLM during inference, yielding additional gains in performance. The detailed pseudo-code for RL training in AIRL-S is presented in Algorithm 1.
3.1 Problem Setup
Let $\mathcal{Q}$ be a dataset of questions and $q∈\mathcal{Q}$ a specific question. From the reference rollouts, we obtain a CoT,
$$
C(q)=\{C_{1},C_{2},\ldots,C_{T}\},
$$
where each $C_{i}$ is a reasoning step that leads to the final answer. Our aim is to learn a PRM $r_{\phi}$ that assigns a reward to every step and provides a dense training signal for optimizing the policy model $\pi_{\theta}$ via RL. At inference time, an online-adapted $r_{\phi}$ steers the search process of $\pi_{\theta}$ , enhancing its reasoning ability on new questions.
3.2 Data Generation and Replay Buffer
At the start of training, we obtain the reference rollouts for each question $q∈\mathcal{Q}$ by either sampling multiple chains of thought (CoTs) from the current policy $\pi_{\theta}$ or reusing existing CoTs. We assign a binary outcome reward, indicates whether a CoT yields the correct final answer. CoTs with a positive reward are stored in a replay buffer $\mathcal{B}$ and serve as the reference rollouts for training the AIRL reward model. To keep the reliability and diversity of $\mathcal{B}$ , we can periodically remove low-quality entries and add newly discovered high-quality CoTs during training.
3.3 Learning PRM via AIRL
To avoid costly step-wise labels utilized in training static PRMs, we leverage the generative adversarial network guided reward learning in AIRL to train a discriminator that distinguishes the reference rollouts from the policy outputs [14, 18, 13, 50]. In AIRL, the discriminator $D_{\phi}$ is defined over state-action pairs. For LLM reasoning, we represent
- state: the question $q$ together with the preceding reasoning steps $\{C_{1},...,C_{i-1}\}$ , and
- action: the current step $C_{i}$ .
The discriminator is:
$$
D_{\phi}(C_{i}\mid q,C_{<i})=\frac{\exp\{f_{\phi}(q,C_{\leq i})\}}{\exp\{f_{\phi}(q,C_{\leq i})\}+\pi_{\theta}(C_{i}\mid q,C_{<i})},
$$
where $f_{\phi}$ is a learned scoring function.
The step-wise reward of $C_{i}$ is then
$$
r_{\phi}(C_{i}\mid q,C_{<i})=\log\frac{D_{\phi}(C_{i}\mid q,C_{<i})}{1-D_{\phi}(C_{i}\mid q,C_{<i})}. \tag{1}
$$
And $r_{\phi}$ serves as the PRM.
We train the discriminator by minimizing
$$
{\cal L}_{\text{AIRL}}=\sum_{i=1}^{T}\Bigl[-\mathbb{E}_{q\sim\mathcal{Q},\,C\sim\pi_{e}(\cdot\mid q)}\!\bigl[\log D_{\phi}(C_{i}\mid q,C_{<i})\bigr]-\mathbb{E}_{q\sim\mathcal{Q},\,C\sim\pi_{\theta}(\cdot\mid q)}\!\bigl[\log\!\bigl(1-D_{\phi}(C_{i}\mid q,C_{<i})\bigr)\bigr]\Bigr], \tag{2}
$$
where $\pi_{e}$ denotes the reference rollout distribution drawn from the replay buffer $\mathcal{B}$ and $\pi_{\theta}$ is the current policy. Updating the discriminator can be seen as updating the reward function $r_{\phi}$ .
Algorithm 1 AIRL-S
Input Initial LLM policy $\pi_{\theta_{\text{init}}}$ ; question set $\mathcal{Q}$ ; Total iterations $E$ ; initial replay buffer $\mathcal{B}$
Initialize policy model $\pi_{\theta}$ , reference model $\pi_{\text{ref}}$ , old policy $\pi_{\text{old}}$ , and PRM $r_{\phi}$ with $\pi_{\theta_{\text{init}}}$
Update replay buffer $\mathcal{B}$ by collecting correct rollouts for $q∈\mathcal{Q}$ using $\pi_{\theta}$
for iteration = 1, …, $E$ do
Sample a batch of questions $\mathcal{B}_{i}$ from $\mathcal{B}$
Generate a group of policy rollouts: $\{C^{1},...,C^{G}\}\sim\pi_{\theta}(·|q)$ for $q∈\mathcal{B}_{i}$
Update the PRM according to AIRL loss in Equation (2)
Update the policy $\pi_{\theta}$ according to the composite objectives in Equation (6)
Update the old policy $\pi_{\text{old}}$ using $\pi_{\theta}$
Update the replay buffer by adding the correct rollouts to $\mathcal{B}$
end for
Output Optimized policy model $\pi_{\theta}$ and PRM $r_{\phi}$
3.4 Policy Training with Combined RL Objectives
The policy model is optimized via RL. In AIRL [14], the objective of the policy model is to maximize the discriminator-derived rewards, thereby "fool" the discriminator into classifying its rollouts are reference rollouts. The AIRL objective is
$$
{\cal J}_{\mathrm{AIRL}}(\theta)=\mathbb{E}_{q\sim\mathcal{Q},\,C\sim\pi_{\theta}(\cdot\mid q)}\Biggl[\sum_{i=1}^{|C|}\min\Bigl(\frac{\pi_{\theta}(C_{i}\mid q,C_{<i})}{\pi_{\mathrm{old}}(C_{i}\mid q,C_{<i})}A_{i},\mathrm{clip}\bigl(\tfrac{\pi_{\theta}(C_{i}\mid q,C_{<i})}{\pi_{\mathrm{old}}(C_{i}\mid q,C_{<i})},\,1-\epsilon,\,1+\epsilon\bigr)A_{i}\Bigr)\Biggr], \tag{3}
$$
where $C$ is a chain of thought (CoT) produced by $\pi_{\theta}$ , $|C|$ is its length, $\pi_{\text{old}}$ is the sampling policy, and $A_{i}$ is the advantage at step $i$ , estimated with a REINFORCE-style method [72].
DeepSeek-R1 achieves strong reasoning performance by pairing binary outcome rewards with group relative policy optimization (GRPO) [20]. For a group of $G$ CoTs $\{C^{k}\}_{k=1}^{G}$ , we utilize the same outcome rewards based GRPO, and the objective is
$$
\mathcal{J}_{\mathrm{GRPO}}(\theta)=\;\mathbb{E}_{q\sim\mathcal{Q},\,\{C^{k}\}_{k=1}^{G}\sim\pi_{\mathrm{old}}(\cdot\mid q)}\\
\Biggl[\frac{1}{G}\sum_{k=1}^{G}\bigl(\min\Bigl(\frac{\pi_{\theta}(C^{k}\mid q)}{\pi_{\mathrm{old}}(C^{k}\mid q)}A^{k},\mathrm{clip}\bigl(\tfrac{\pi_{\theta}(C^{k}\mid q)}{\pi_{\mathrm{old}}(C^{k}\mid q)},\,1-\epsilon,\,1+\epsilon\bigr)A^{k}\Bigr)-\beta\,\mathrm{D}_{\mathrm{KL}}\!\bigl(\pi_{\theta}\|\pi_{\mathrm{ref}}\bigr)\Bigr)\Biggr], \tag{4}
$$
$$
\mathrm{D}_{\mathrm{KL}}\!\bigl(\pi_{\theta}\|\pi_{\mathrm{ref}}\bigr)=\frac{\pi_{\mathrm{ref}}(C^{k}\mid q)}{\pi_{\theta}(C^{k}\mid q)}-\log\!\frac{\pi_{\theta}(C^{k}\mid q)}{\pi_{\mathrm{ref}}(C^{k}\mid q)}-1, \tag{5}
$$
where $\pi_{\text{ref}}$ is a frozen reference model, and $\epsilon$ and $\beta$ are hyper-parameters. The advantage $A^{k}$ for each CoT in the group is computed from the binary outcome rewards.
We define a composite objective that combines the AIRL objective and GRPO objective to incorporate both the intermediate step rewards and the outcome rewards, and update the policy model to maximize the combined RL objectives:
$$
{\cal J}(\theta)=\lambda\,{\cal J}_{\mathrm{AIRL}}(\theta)+(1-\lambda)\,{\cal J}_{\mathrm{GRPO}}(\theta), \tag{6}
$$
where $\lambda$ is a hyperparameter to balance the outcome rewards and process rewards.
The training alternates between (i) updating the discriminator $D_{\phi}$ to distinguish reference rollouts from policy rollouts, and (ii) optimizing the policy by maximizing the composite objectives of AIRL and GRPO in Equation (6).
<details>
<summary>x1.png Details</summary>
### Visual Description
## TTS Diagram: RL Base vs. Search Base
### Overview
The image presents a diagram comparing two Text-to-Speech (TTS) approaches: RL Base TTS and Search Base TTS. The diagram outlines the processes involved in each approach, including policy rollouts, AIRL discriminator, beam search, and Monte Carlo Tree Search (MCTS).
### Components/Axes
**RL Base TTS (Top Section):**
* **Input:** `q` (unspecified, assumed to be input text or query)
* **Process Flow:**
* `q` feeds into `Policy πθ` (a policy network).
* `Policy πθ` leads to `Policy Rollouts Sampled CoTs` (policy rollouts with sampled chains of thought).
* `Reference CoTs` (reference chains of thought) are also used.
* `Policy Rollouts Sampled CoTs` and `Reference CoTs` feed into `AIRL Discriminator Step-wise reward rφ`.
* `AIRL Discriminator Step-wise reward rφ` outputs `Outcome Reward JGRPO` and `Step-wise Reward JAIRL`.
* `Outcome Reward JGRPO` and `Step-wise Reward JAIRL` lead to `Policy Update`.
* **Elements:**
* Boxes represent processes or components.
* Arrows indicate the flow of data or control.
**Search Base TTS (Bottom Section):**
* **Sub-sections:** Best-of-N, Beam Search, MCTS
* **Best-of-N:**
* **Input:** `Question q`
* **Process:** Generates N solutions and uses PRM (Policy Ranking Model) to select the best.
* **Visual Representation:** Several lines (red and blue) connect the `Question q` box to a series of dashed-line boxes, each containing a circle.
* **Beam Search:**
* **Input:** `Question q`
* **Process:** PRM ranks and retains top-N steps per decision.
* **Visual Representation:** A grid of dashed-line boxes, each containing a circle. Red and blue lines connect the boxes, representing the search path.
* **MCTS:**
* **Process:** A cyclical process involving Selection, Expansion, Simulation, and Backpropagation.
* **Selection:** Select nodes by UCT (Upper Confidence Bound 1 applied to Trees) score.
* **Expansion:** Expand the tree by generating steps.
* **Simulation:** Simulate value by extending nodes.
* **Backpropagation:** Backpropagate to update the tree.
* **Visual Representation:** Tree structures within each stage, with arrows indicating the flow of the MCTS cycle.
**Legend (Bottom):**
* `Apply PRM`: Dashed-line box
* `Rejected Step`: Orange circle
* `Selected Step`: Blue circle
* `Intermediate Step`: White circle
* `Full Solution`: Dark gray circle
### Detailed Analysis or ### Content Details
**RL Base TTS:**
* The process starts with an input `q` and uses a policy network `πθ` to generate rollouts.
* An AIRL discriminator evaluates the rollouts and provides rewards.
* These rewards are used to update the policy.
**Search Base TTS:**
* **Best-of-N:** Multiple solutions are generated, and PRM selects the best one. The lines connecting the question to the solutions are both red and blue, indicating both rejected and selected steps.
* **Beam Search:** A beam search algorithm is used to explore possible solutions, with PRM ranking and retaining the top-N steps. The grid shows a series of steps, with orange circles indicating rejected steps and blue circles indicating selected steps.
* **MCTS:** The MCTS process iteratively selects, expands, simulates, and backpropagates to build a search tree.
* **Selection:** Nodes are selected based on their UCT score.
* **Expansion:** The tree is expanded by generating new steps.
* **Simulation:** The value of the tree is estimated by simulating further steps.
* **Backpropagation:** The results of the simulation are used to update the values of the nodes in the tree.
### Key Observations
* The RL Base TTS approach uses a policy network and an AIRL discriminator to learn a policy for generating speech.
* The Search Base TTS approach uses a combination of Best-of-N, Beam Search, and MCTS to search for the best possible solution.
* The MCTS process is cyclical, with each stage building upon the previous one.
### Interpretation
The diagram illustrates two distinct approaches to Text-to-Speech synthesis. The RL Base TTS leverages reinforcement learning to optimize a policy for generating speech, while the Search Base TTS employs search algorithms to find the best possible solution from a set of candidates. The diagram highlights the key components and processes involved in each approach, providing a visual comparison of their methodologies. The use of PRM in the Search Base TTS suggests a learned ranking model is used to guide the search process. The MCTS component indicates a tree-based search strategy, allowing for exploration and exploitation of different solution paths.
</details>
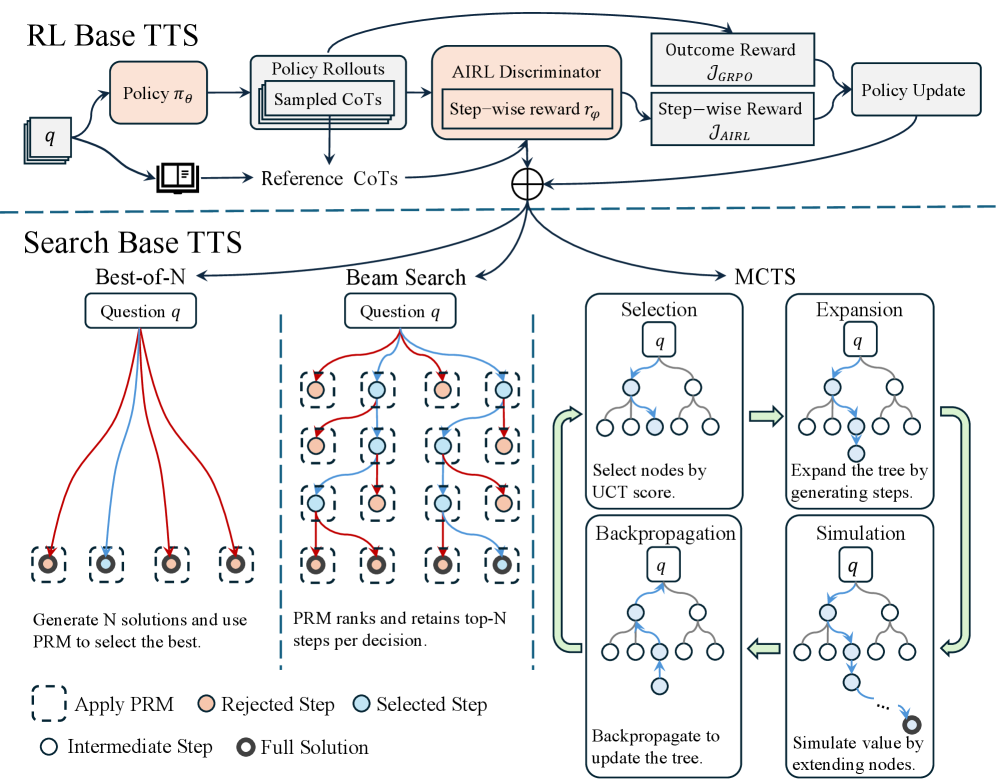
Figure 1: Overview of AIRL-S . During training, AIRL-S uses the AIRL discriminator to learn a PRM and optimizes the policy with both dense rewards from AIRL and outcome rewards from GRPO. At test time, the trained policy and PRM jointly guide downstream search algorithms.
3.5 PRM-guided Test-Time Search
Test-Time Search.
At inference time, search-based TTS explores multiple CoTs rather than generating a single pass. Approaches such as Best-of- N [62], beam search [76], and Monte Carlo Tree Search (MCTS) [85] improve reasoning by leverage outcome or process reward models to guide exploration. Because our reward function $r_{\phi}$ is learned and adapted on the policy LLM during RL, we can seamlessly reuse it as a PRM to steer the search procedure. When the policy proposes several actions, either intermediate steps or complete solutions, we score each candidate with $r_{\phi}$ and retain those with the highest scores according to the chosen search strategy. Figure 1 illustrates how $r_{\phi}$ integrates with Best-of-N, beam search, and MCTS; implementation details are provided in Appendix A.
- Best-of- N. For a question $q$ , we sample $N$ full solutions from $\pi_{\theta}(·\mid q)$ and select the one with the highest PRM aggregation score (defined below).
- Beam Search. With beam size $N$ and beam width $M$ , we extend each beam node by $M$ candidate steps, rank those steps by $r_{\phi}$ , and keep the top $N$ nodes. The process continues until we obtain $N$ complete solutions.
- MCTS. Using expansion width $M$ , we select a node by the upper confidence bound for trees (UCT) criterion, which combines PRM rewards with visit counts [63, 31]. We then generate $M$ child steps, simulate rollouts using $r_{\phi}$ to estimate node values, and back-propagate the rewards. The search returns $N$ full solutions.
PRM Aggregation.
After search, we obtain $N$ candidate solutions $\{C^{k}\}_{k=1}^{N}$ for each question $q$ . Following Snell et al. [62], for every solution $C^{k}$ we compute a step-wise aggregation score
$$
s\!\bigl(C^{k}\bigr)=\min_{i}r_{\phi}\!\bigl(C^{k}_{i}\bigr),
$$
namely, the smallest PRM reward among its steps. Let $A^{k}$ be the final answer produced by $C^{k}$ . For inter-answer aggregation, we aggregate the step-wise scores of all solutions that yield the same distinct answer $a$ :
$$
S(a)=\sum_{k:\,A^{(k)}=a}\,s\!\bigl(C^{(k)}\bigr).
$$
The answer with the largest $S(a)$ is selected as the model’s prediction; we term this method PRM-Min-Sum. Further implementation details and the definition of other PRM aggregation methods appear in Appendix A.
4 Experiments
To evaluate the effectiveness of the unified RL-based and search-based TTS technique in AIRL-S , we conduct extensive experiments to (i) compare the performance of our policy model to current state-of-the-art (SoTA) comparable size models on eight reasoning tasks, (ii) compare our PRM to PRMs trained on labeled datasets and implicit PRMs, (iii) combine our policy model and PRM with various search-based TTS techniques, (iv) conduct additional experiments to investigate the effect of the combined AIRL and GRPO objectives in RL training and the impact of various answer aggregation techniques in search-based TTS.
4.1 Experimental Details
LLMs.
Policy Baselines: We select SoTA open-source and API models as baselines for our policy model. The open-source LLMs encompass models specifically designed for or excelling in reasoning through RL training, such as Math-Shepherd-Mistral-7B-RL [71], DeepSeek-Math-7B-RL [60], Qwen2.5-Math-7B-Instruct [24], and Eurus-2-7B-PRIME [11]. We also include Qwen2.5-7B-Instruct [56] and Phi-4-14B [2] as general-purpose open-source baselines. We further include s1.1-7B [49] as a baseline trained through direct imitation learning on DeepSeek-R1 demonstrations instead of AIRL. For API models, we select DeepSeek-R1 [20], DeepseekV3 (2025-03-24) [38] and GPT-4o (2024-11-20) [51] as baselines. PRM Baselines: We select Math-Shepherd-Mistral-7B-PRM [69] and Llama3.1-8B-PRM-Deepseek-Data [77] as PRM baselines trained on labeled step-wise data. We choose the recent EurusPRM-Stage2 [79] as an implicit PRM baseline trained through ORM. More details of the baseline models are expanded in Appendix B.
Tasks.
Mathematical/Scientific Reasoning: We evaluate on AIME2024 [45], AMC [46], MATH500 [23], and GPQA-Diamond [59] to validate the effectiveness of AIRL-S in mathematical or scientific reasoning tasks. Coding: We further evaluate the reasoning capabilities of our model in coding tasks on four benchmarks, including HumanEval [7], MBPP [19], LeetCode [10], and LiveCodeBench (v4) [26]. Details of all the tasks are introduced in Appendix B.
Training.
Our full training dataset contains 160K questions, mostly sampled from NuminaMATH [33]. We use the LLM policy self-generated responses as the reference rollouts, and the rollouts are generated using rollout prompts, and more details are shared in Appendix B. We initialize both $\pi_{\theta}$ and $f_{\phi}$ using Qwen2.5-7B-Instruct, while we modify the head of $f_{\phi}$ into a scalar-value prediction head. The training is conducted on 8 NVIDIA A100 GPUs with Pytorch FSDP. We use a learning rate of 2e-6 for the reward model and 5e-7 for the policy model, maximum output length is set to 8,192, and the training batch size is 1024. For each question, we sample 8 outputs using the rollout prompts. The KL coefficient is set to 0.001, $\lambda$ is set to 0.5, and the total training epochs are 2.
Evaluation.
For results where search-based TTS is not applied, we report zero-shot Accuracy@1 for math and science tasks, and Pass@1 for coding tasks using a temperature of 0 for reproducibility. For results where search-based TTS is applied, we use a temperature of 0.7 to enable step exploration, tree width $M$ is set to 4, and the performance of the PRM aggregated solution is reported. The main results are averaged over three runs.
4.2 Main Results
Effectiveness of the Policy Model.
To comprehensively validate the performance of our policy model Qwen2.5-7B-AIRL-S , we compare it to ten SoTA LLMs (open- and closed-source) on eight reasoning tasks. The results in Table 1 lead to the following observations: (i) AIRL-S can effectively enhance the reasoning performance of the base model. When trained on Qwen2.5-7B-Instruct, our policy achieves an average improvement of 9% across eight benchmarks and a 13% improvement on mathematical and scientific reasoning tasks. (ii) Our policy exhibits strong performance compared to existing LLMs trained through RL. AIRL-S outperforms Math-Shepherd-Mistral-7B-RL, DeepSeek-Math-7B-RL, and Qwen2.5-Math-7B-Instruct (trained with PRMs from labeled step-wise datasets) and Eurus-2-7B-PRIME (trained with an implicit PRM derived from its policy). Compared to these models, AIRL-S consistently achieves higher reasoning accuracy on all tasks by learning a policy-independent step-wise reward function through AIRL. (iii) Our approach surpasses direct imitation learning on reference rollouts. Compared to s1.1-7B trained via supervised fine-tuning on DeepSeek-R1 demonstrations, AIRL-S yields an average improvement of 15% by learning a reward function from reference rollouts and maximizing the rewards instead of direct imitation learning. (iv) Finally, AIRL-S outperforms the recently released Phi-4-14B on average despite having half its parameter count and matches the performance of the general-purpose model GPT-4o.
Table 1: Comparison of our policy model with ten SoTA open- and closed-source LLMs across eight reasoning benchmarks. Boldface indicates the top result within each model category; green highlighting denotes the best result among local models. Our policy achieves the highest average performance among local models and matches GPT-4o overall. (GPQA: GPQA-Diamond; LCB-v4: LiveCodeBench-v4)
| Model | Mathematical/Scientific Reasoning | Coding | Avg. | | | | | | |
| --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| AIME2024 | AMC | MATH500 | GPQA | HumanEval | Leetcode | LCB-v4 | MBPP | | |
| API Models | | | | | | | | | |
| DeepSeek-R1 | 79.8 | 85.5 | 96.5 | 71.2 | 97.6 | 90.4 | 71.1 | 95.8 | 86.0 |
| DeepSeek-V3 | 36.7 | 81.9 | 90.2 | 61.1 | 93.3 | 88.3 | 67.0 | 88.9 | 75.9 |
| GPT-4o | 13.3 | 50.6 | 65.8 | 43.9 | 90.2 | 60.6 | 44.2 | 87.3 | 57.0 |
| Local Models (RL with PRMs) | | | | | | | | | |
| Math-Shepherd-Mistral-7B-RL | 0.0 | 7.2 | 28.6 | 9.6 | 32.3 | 5.6 | 3.9 | 51.1 | 17.3 |
| DeepSeekMath-7B-RL | 3.3 | 18.1 | 48.6 | 23.2 | 58.5 | 11.2 | 6.2 | 73.1 | 30.3 |
| Qwen2.5-Math-7B-Instruct | 13.3 | 50.6 | 79.6 | 29.3 | 57.9 | 11.7 | 9.3 | 46.0 | 37.2 |
| Eurus-2-7B-PRIME | 20.0 | 56.6 | 79.2 | 33.8 | 70.7 | 31.1 | 24.3 | 70.1 | 48.2 |
| Local Models (Other Baselines) | | | | | | | | | |
| s1.1-7B | 16.7 | 38.6 | 72.6 | 35.4 | 76.8 | 11.1 | 9.3 | 76.7 | 42.2 |
| Qwen2.5-7B-Instruct | 16.7 | 33.7 | 72.0 | 32.5 | 81.7 | 47.4 | 28.0 | 79.4 | 48.9 |
| Phi-4-14B | 13.3 | 44.6 | 78.6 | 55.6 | 84.1 | 45.6 | 31.2 | 74.3 | 53.4 |
| Qwen2.5-7B-AIRL-S (Ours) | 26.7 | 59.0 | 80.2 | 40.2 | 85.1 | 54.4 | 31.3 | 83.3 | 57.5 |
Effectiveness of the PRM.
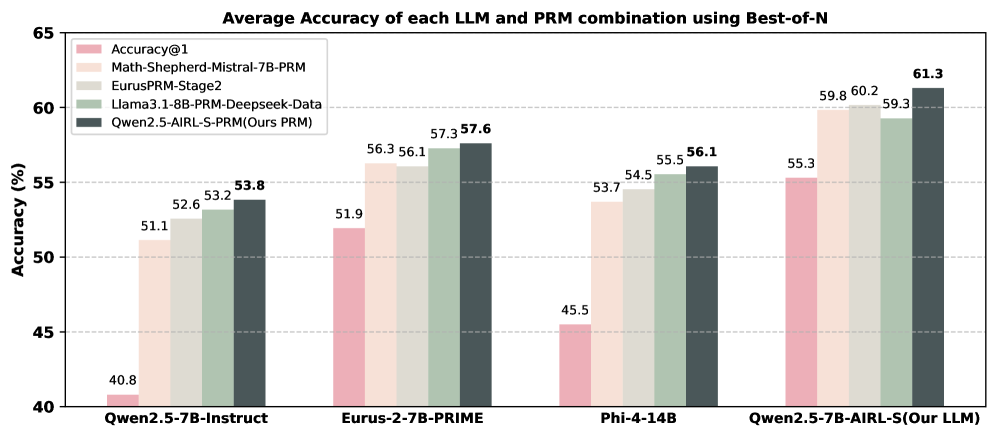
We assess the generalizability of our PRM, Qwen2.5-AIRL-S-PRM, by comparing it to PRMs trained on labeled step-wise datasets. We evaluate four PRMs using Best-of-N search with 64 rollouts on AIME2024, AMC, and MATH500 across four generative LLMs. The average performance of each LLM–PRM pair is shown in Figure 2, and detailed results are provided in Appendix C. Our observations are: (i) Qwen2.5-AIRL-S-PRM improves Best-of-N performance for all LLMs and datasets, outperforming Math-Shepherd-Mistral-7B-PRM and EurusPRM-Stage2 by 2.4% and 1.4%, respectively. (ii) Combining Qwen2.5-7B-AIRL-S with Qwen2.5-AIRL-S-PRM yields the best performance among all LLM–PRM combinations, with an 11% gain over Qwen2.5-7B-Instruct with Math-Shepherd-Mistral-7B-PRM. These results demonstrate that AIRL-S effectively unifies RL-based TTS and Search-based TTS and that our PRM generalizes across different models and datasets.
<details>
<summary>x2.png Details</summary>
### Visual Description
## Bar Chart: Average Accuracy of LLM and PRM Combinations
### Overview
The image is a bar chart comparing the average accuracy of different Large Language Model (LLM) and Prompt Relation Model (PRM) combinations using a "Best-of-N" approach. The chart displays accuracy percentages for four different LLM configurations, each tested with five different PRM setups.
### Components/Axes
* **Title:** Average Accuracy of each LLM and PRM combination using Best-of-N
* **Y-axis:** Accuracy (%), ranging from 40% to 65% with gridlines at 45%, 50%, 55%, and 60%.
* **X-axis:** Categorical axis representing different LLM configurations:
* Qwen2.5-7B-Instruct
* Eurus-2-7B-PRIME
* Phi-4-14B
* Qwen2.5-7B-AIRL-S(Our LLM)
* **Legend:** Located in the top-left corner, mapping PRM setups to bar colors:
* Accuracy@1 (light pink)
* Math-Shepherd-Mistral-7B-PRM (light beige)
* EurusPRM-Stage2 (light gray)
* Llama3.1-8B-PRM-Deepseek-Data (light green)
* Qwen2.5-AIRL-S-PRM(Ours PRM) (dark gray)
### Detailed Analysis
The chart presents accuracy values for each LLM configuration across the five PRM setups. Here's a breakdown:
* **Qwen2.5-7B-Instruct:**
* Accuracy@1: 40.8%
* Math-Shepherd-Mistral-7B-PRM: 51.1%
* EurusPRM-Stage2: 52.6%
* Llama3.1-8B-PRM-Deepseek-Data: 53.2%
* Qwen2.5-AIRL-S-PRM(Ours PRM): 53.8%
* **Eurus-2-7B-PRIME:**
* Accuracy@1: 51.9%
* Math-Shepherd-Mistral-7B-PRM: 56.3%
* EurusPRM-Stage2: 56.1%
* Llama3.1-8B-PRM-Deepseek-Data: 57.3%
* Qwen2.5-AIRL-S-PRM(Ours PRM): 57.6%
* **Phi-4-14B:**
* Accuracy@1: 45.5%
* Math-Shepherd-Mistral-7B-PRM: 53.7%
* EurusPRM-Stage2: 54.5%
* Llama3.1-8B-PRM-Deepseek-Data: 55.5%
* Qwen2.5-AIRL-S-PRM(Ours PRM): 56.1%
* **Qwen2.5-7B-AIRL-S(Our LLM):**
* Accuracy@1: 55.3%
* Math-Shepherd-Mistral-7B-PRM: 59.8%
* EurusPRM-Stage2: 60.2%
* Llama3.1-8B-PRM-Deepseek-Data: 59.3%
* Qwen2.5-AIRL-S-PRM(Ours PRM): 61.3%
### Key Observations
* The "Qwen2.5-7B-AIRL-S(Our LLM)" configuration generally achieves the highest accuracy across all PRM setups.
* The "Accuracy@1" PRM setup consistently yields the lowest accuracy compared to other PRM setups for each LLM configuration.
* The "Qwen2.5-7B-Instruct" configuration shows the lowest overall accuracy compared to the other LLM configurations.
* Using "Qwen2.5-AIRL-S-PRM(Ours PRM)" as the PRM setup generally results in the highest accuracy for each LLM configuration.
### Interpretation
The data suggests that the choice of both LLM and PRM significantly impacts the overall accuracy. The "Qwen2.5-7B-AIRL-S(Our LLM)" model, when combined with the "Qwen2.5-AIRL-S-PRM(Ours PRM)" prompt, appears to be the most effective combination, achieving the highest average accuracy. The "Accuracy@1" PRM setup seems to be the least effective across all LLMs tested. The results highlight the importance of optimizing both the language model and the prompting strategy to achieve optimal performance.
</details>
Figure 2: Average performance of four PRMs applied to four generative LLMs using Best-of-N with 64 rollouts on AIME2024, AMC, and MATH500. Our PRM (Qwen2.5-AIRL-S-PRM) consistently delivers the highest test-time search performance across all models and datasets.
Effectiveness on Different Search-Based TTS Methods.
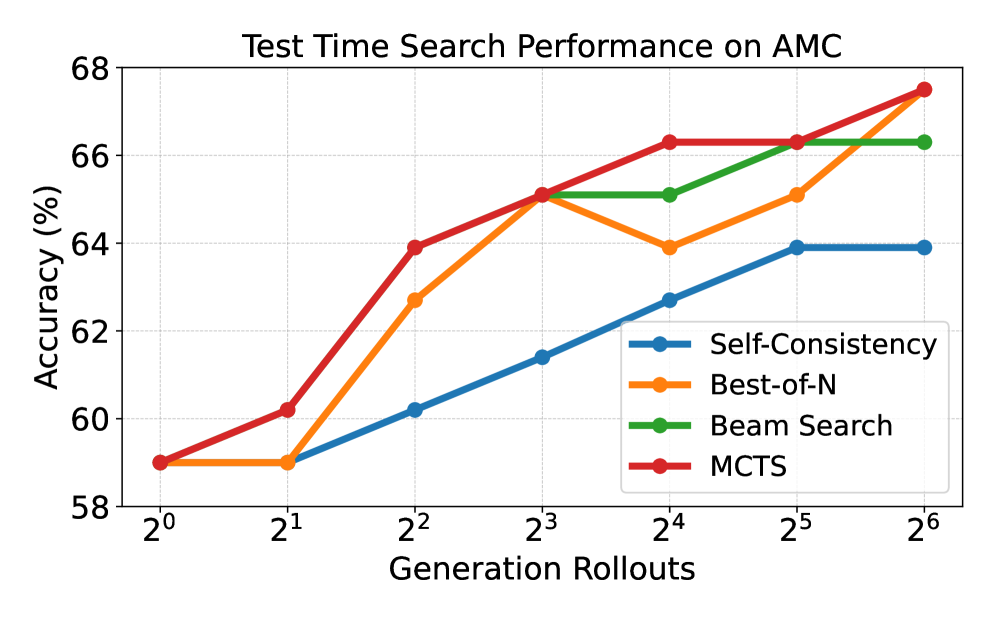
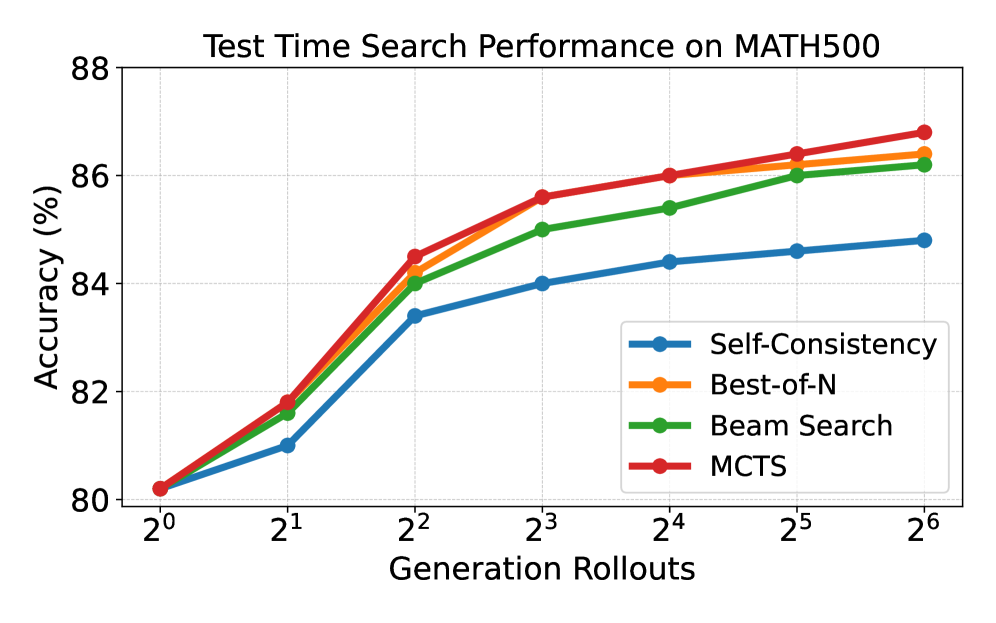
We evaluate our PRM within three search-based TTS methods, MCTS, beam search, and Best-of-N, using Qwen2.5-7B-AIRL-S as the generative LLM and Qwen2.5-AIRL-S-PRM as the verifier. We include Self-Consistency [70] as a baseline for sanity check: it generates multiple complete solutions and uses majority vote to select the final answer without any PRM or ORM. Results on AMC and MATH500 in Figure 3 show that: (i) Our PRM effectively guides the search, selection, and aggregation processes for all search algorithms. It improves performance across all search-based methods as the number of rollouts increases and outperforms Self-Consistency under the same rollouts. This result indicates that reward-guided step generation and selection produce more accurate intermediate decisions than majority voting on final answers. (ii) The PRM is especially effective for value-based methods like MCTS. By estimating step values during tree expansion and selecting nodes by UCT score, MCTS benefits more from the PRM’s guidance, leading to more accurate intermediate steps.
<details>
<summary>x3.png Details</summary>
### Visual Description
## Line Chart: Test Time Search Performance on AMC
### Overview
The image is a line chart comparing the accuracy of four different search algorithms (Self-Consistency, Best-of-N, Beam Search, and MCTS) as a function of generation rollouts. The x-axis represents generation rollouts on a logarithmic scale (base 2), and the y-axis represents accuracy in percentage.
### Components/Axes
* **Title:** Test Time Search Performance on AMC
* **X-axis:**
* Label: Generation Rollouts
* Scale: Logarithmic (base 2)
* Markers: 2<sup>0</sup>, 2<sup>1</sup>, 2<sup>2</sup>, 2<sup>3</sup>, 2<sup>4</sup>, 2<sup>5</sup>, 2<sup>6</sup>
* **Y-axis:**
* Label: Accuracy (%)
* Scale: Linear
* Markers: 58, 60, 62, 64, 66, 68
* **Legend:** Located in the bottom-right corner.
* Self-Consistency (Blue)
* Best-of-N (Orange)
* Beam Search (Green)
* MCTS (Red)
### Detailed Analysis
* **Self-Consistency (Blue):**
* Trend: Generally increasing with generation rollouts.
* Data Points:
* 2<sup>0</sup>: ~59%
* 2<sup>1</sup>: ~59%
* 2<sup>2</sup>: ~60%
* 2<sup>3</sup>: ~61.5%
* 2<sup>4</sup>: ~62.7%
* 2<sup>5</sup>: ~64%
* 2<sup>6</sup>: ~64%
* **Best-of-N (Orange):**
* Trend: Increases initially, then decreases slightly, and increases again.
* Data Points:
* 2<sup>0</sup>: ~59%
* 2<sup>1</sup>: ~59%
* 2<sup>2</sup>: ~63%
* 2<sup>3</sup>: ~65%
* 2<sup>4</sup>: ~64%
* 2<sup>5</sup>: ~65%
* 2<sup>6</sup>: ~67%
* **Beam Search (Green):**
* Trend: Increases, plateaus, then increases again.
* Data Points:
* 2<sup>0</sup>: ~59%
* 2<sup>1</sup>: ~59%
* 2<sup>2</sup>: ~64%
* 2<sup>3</sup>: ~65%
* 2<sup>4</sup>: ~65%
* 2<sup>5</sup>: ~66%
* 2<sup>6</sup>: ~66%
* **MCTS (Red):**
* Trend: Consistently increasing with generation rollouts.
* Data Points:
* 2<sup>0</sup>: ~59%
* 2<sup>1</sup>: ~60%
* 2<sup>2</sup>: ~64%
* 2<sup>3</sup>: ~65.2%
* 2<sup>4</sup>: ~66.3%
* 2<sup>5</sup>: ~66.3%
* 2<sup>6</sup>: ~67.5%
### Key Observations
* MCTS (Red) generally performs the best, achieving the highest accuracy at the end.
* Self-Consistency (Blue) has the lowest initial accuracy and increases steadily, but plateaus at 2<sup>5</sup>.
* Best-of-N (Orange) and Beam Search (Green) show similar performance, with Best-of-N eventually surpassing Beam Search.
* All algorithms show improvement in accuracy as the number of generation rollouts increases, but the rate of improvement varies.
### Interpretation
The chart illustrates the performance of different search algorithms in terms of accuracy as the number of generation rollouts increases. MCTS appears to be the most effective algorithm for this task, consistently achieving higher accuracy compared to the others. Self-Consistency, while showing steady improvement, plateaus at higher generation rollouts. Best-of-N and Beam Search offer comparable performance, with Best-of-N eventually outperforming Beam Search. The data suggests that increasing generation rollouts generally improves accuracy, but the extent of improvement depends on the specific algorithm used. The choice of algorithm and the number of generation rollouts should be carefully considered to optimize performance for the given task.
</details>
<details>
<summary>x4.png Details</summary>
### Visual Description
## Line Chart: Test Time Search Performance on MATH500
### Overview
The image is a line chart comparing the test time search performance of four different methods (Self-Consistency, Best-of-N, Beam Search, and MCTS) on the MATH500 dataset. The x-axis represents the number of generation rollouts (ranging from 2^0 to 2^6), and the y-axis represents the accuracy in percentage.
### Components/Axes
* **Title:** Test Time Search Performance on MATH500
* **X-axis:**
* Label: Generation Rollouts
* Scale: Logarithmic, base 2. Markers at 2^0, 2^1, 2^2, 2^3, 2^4, 2^5, and 2^6.
* **Y-axis:**
* Label: Accuracy (%)
* Scale: Linear, ranging from 80 to 88. Markers at 80, 82, 84, 86, and 88.
* **Legend:** Located in the bottom-right corner of the chart.
* Self-Consistency (Blue)
* Best-of-N (Orange)
* Beam Search (Green)
* MCTS (Red)
### Detailed Analysis
* **Self-Consistency (Blue):** The line starts at approximately 80.2% at 2^0 rollouts, increases to approximately 81% at 2^1, then to 83.5% at 2^2, 84% at 2^3, 84.5% at 2^4, 84.6% at 2^5, and finally reaches approximately 84.8% at 2^6. The trend is generally upward, but the rate of increase slows down as the number of rollouts increases.
* **Best-of-N (Orange):** The line starts at approximately 80.2% at 2^0 rollouts, increases to approximately 81.8% at 2^1, then to 84.2% at 2^2, 85.2% at 2^3, 85.8% at 2^4, 86.2% at 2^5, and finally reaches approximately 86.4% at 2^6. The trend is generally upward, but the rate of increase slows down as the number of rollouts increases.
* **Beam Search (Green):** The line starts at approximately 80.2% at 2^0 rollouts, increases to approximately 81.8% at 2^1, then to 84% at 2^2, 85.4% at 2^3, 85.5% at 2^4, 86.1% at 2^5, and finally reaches approximately 86.2% at 2^6. The trend is generally upward, but the rate of increase slows down as the number of rollouts increases.
* **MCTS (Red):** The line starts at approximately 80.2% at 2^0 rollouts, increases to approximately 82% at 2^1, then to 84.5% at 2^2, 85.6% at 2^3, 86% at 2^4, 86.5% at 2^5, and finally reaches approximately 87% at 2^6. The trend is generally upward, but the rate of increase slows down as the number of rollouts increases.
### Key Observations
* All four methods show an increase in accuracy as the number of generation rollouts increases.
* MCTS consistently outperforms the other three methods across all rollout values.
* Self-Consistency consistently underperforms the other three methods across all rollout values.
* The performance gap between the methods narrows as the number of rollouts increases, suggesting diminishing returns.
### Interpretation
The chart demonstrates the impact of increasing generation rollouts on the test time search performance of different methods on the MATH500 dataset. The results suggest that MCTS is the most effective method for this task, achieving the highest accuracy across all rollout values. While all methods benefit from increased rollouts, the gains diminish as the number of rollouts increases, indicating a trade-off between computational cost and performance improvement. The consistent underperformance of Self-Consistency suggests that it may not be as well-suited for this particular task compared to the other methods.
</details>
Figure 3: Comparison of test-time search performance with our PRM applied to MCTS, Beam Search, and Best-of-N across varying rollout counts. Our PRM consistently improves performance for all search techniques.
4.3 Ablation Study
Impact of Our PRM on RL Training.
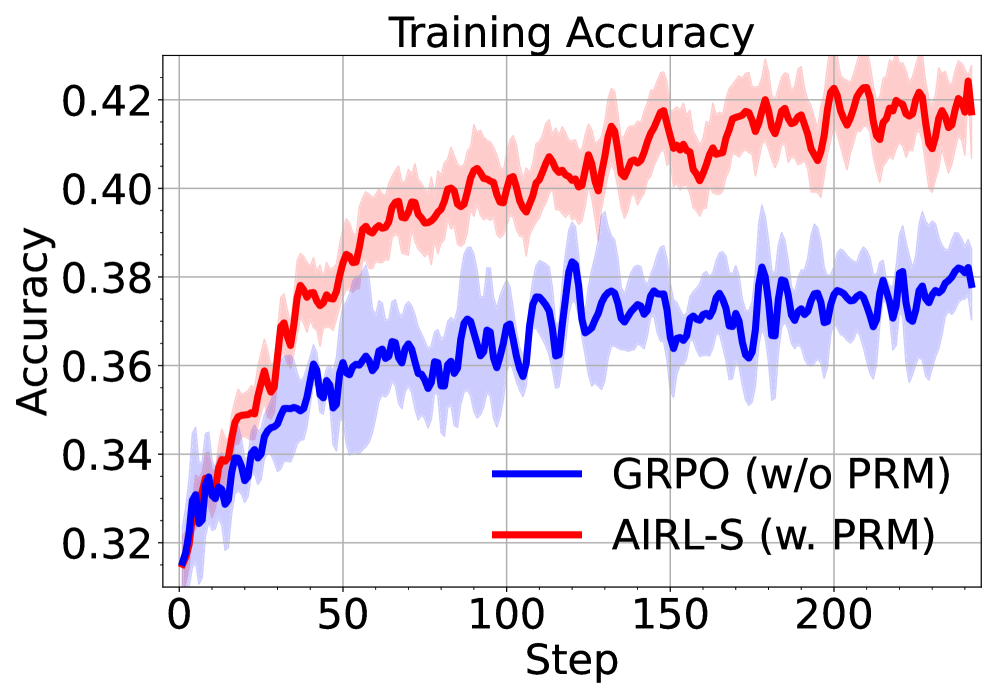
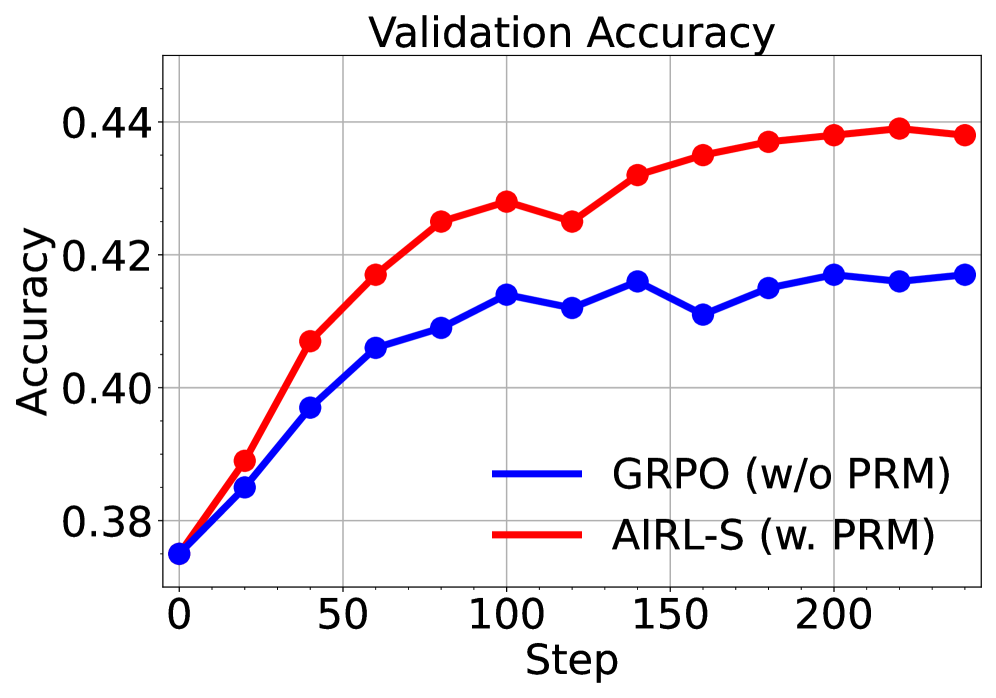
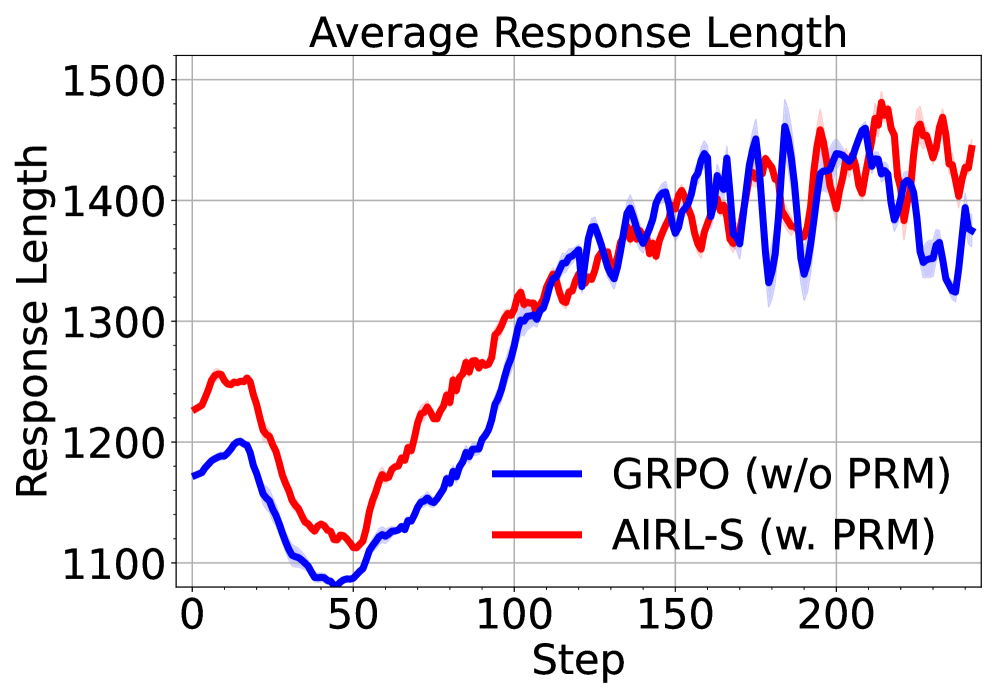
To assess the contribution of our reward function on RL training, we compare AIRL-S to GRPO trained with outcome rewards only (no PRM), while keeping all other settings identical to AIRL-S . The results in Figure 4 show that adding our PRM improves both training and validation accuracy. Furthermore, as training progresses, AIRL-S enables longer response generation at test time, demonstrating its ability to scale inference computation.
<details>
<summary>x5.png Details</summary>
### Visual Description
## Chart: Training Accuracy
### Overview
The image is a line graph comparing the training accuracy of two algorithms, GRPO (w/o PRM) and AIRL-S (w. PRM), over a number of steps. The graph shows the accuracy of each algorithm as a function of the training step, with shaded regions indicating the variance or standard deviation around the mean accuracy.
### Components/Axes
* **Title:** Training Accuracy
* **X-axis:** Step, with markers at 0, 50, 100, 150, and 200.
* **Y-axis:** Accuracy, with markers at 0.32, 0.34, 0.36, 0.38, 0.40, and 0.42.
* **Legend:** Located at the bottom of the chart.
* Blue line: GRPO (w/o PRM)
* Red line: AIRL-S (w. PRM)
### Detailed Analysis
* **GRPO (w/o PRM) - Blue Line:**
* Trend: The blue line generally slopes upward, indicating an increase in accuracy as the number of steps increases. The line exhibits fluctuations.
* Data Points:
* At step 0, accuracy is approximately 0.32.
* At step 50, accuracy is approximately 0.36.
* At step 100, accuracy is approximately 0.37.
* At step 150, accuracy is approximately 0.37.
* At step 200, accuracy is approximately 0.38.
* **AIRL-S (w. PRM) - Red Line:**
* Trend: The red line generally slopes upward, indicating an increase in accuracy as the number of steps increases. The line exhibits fluctuations.
* Data Points:
* At step 0, accuracy is approximately 0.32.
* At step 50, accuracy is approximately 0.38.
* At step 100, accuracy is approximately 0.40.
* At step 150, accuracy is approximately 0.41.
* At step 200, accuracy is approximately 0.42.
### Key Observations
* Both algorithms show an increase in accuracy as the number of training steps increases.
* AIRL-S (w. PRM) consistently outperforms GRPO (w/o PRM) in terms of training accuracy.
* The shaded regions around each line indicate the variance in the accuracy, with AIRL-S (w. PRM) showing less variance than GRPO (w/o PRM).
### Interpretation
The data suggests that AIRL-S (w. PRM) is a more effective algorithm for this particular training task, as it achieves higher accuracy and exhibits less variance compared to GRPO (w/o PRM). The inclusion of PRM (presumably a specific technique or module) in AIRL-S appears to contribute to its superior performance. The increasing accuracy of both algorithms over time indicates that they are learning and improving their performance as they are exposed to more training data. The fluctuations in the lines suggest that the learning process is not perfectly smooth and may be affected by noise or other factors.
</details>
<details>
<summary>x6.png Details</summary>
### Visual Description
## Line Chart: Validation Accuracy
### Overview
The image is a line chart comparing the validation accuracy of two algorithms, GRPO (w/o PRM) and AIRL-S (w. PRM), over a series of steps. The chart displays accuracy on the y-axis and steps on the x-axis.
### Components/Axes
* **Title:** Validation Accuracy
* **X-axis:**
* Label: Step
* Scale: 0 to 200, with markers at 0, 50, 100, 150, and 200.
* **Y-axis:**
* Label: Accuracy
* Scale: 0.38 to 0.44, with markers at 0.38, 0.40, 0.42, and 0.44.
* **Legend:** Located in the bottom-right corner.
* Blue line: GRPO (w/o PRM)
* Red line: AIRL-S (w. PRM)
### Detailed Analysis
* **GRPO (w/o PRM) - Blue Line:**
* Trend: Initially increases, plateaus, then fluctuates slightly.
* Data Points:
* Step 0: Accuracy ~0.375
* Step 50: Accuracy ~0.405
* Step 100: Accuracy ~0.41
* Step 150: Accuracy ~0.415
* Step 200: Accuracy ~0.417
* **AIRL-S (w. PRM) - Red Line:**
* Trend: Increases rapidly initially, then plateaus at a higher accuracy.
* Data Points:
* Step 0: Accuracy ~0.375
* Step 50: Accuracy ~0.418
* Step 100: Accuracy ~0.427
* Step 150: Accuracy ~0.433
* Step 200: Accuracy ~0.439
### Key Observations
* Both algorithms start with approximately the same accuracy (~0.375).
* AIRL-S (w. PRM) consistently outperforms GRPO (w/o PRM) in terms of validation accuracy.
* The accuracy of AIRL-S (w. PRM) plateaus more noticeably than GRPO (w/o PRM).
### Interpretation
The chart suggests that the AIRL-S algorithm, when used with PRM, achieves a higher validation accuracy compared to the GRPO algorithm without PRM. The initial rapid increase in accuracy for AIRL-S indicates a faster learning rate or better initial performance. The plateauing of both lines suggests that further training steps may not significantly improve the validation accuracy for either algorithm. The PRM component seems to be a significant factor in the performance difference between the two algorithms.
</details>
<details>
<summary>x7.png Details</summary>
### Visual Description
## Chart: Average Response Length
### Overview
The image is a line chart comparing the average response length of two algorithms, GRPO (without PRM) and AIRL-S (with PRM), over a series of steps. The chart displays the response length on the y-axis and the step number on the x-axis. Both algorithms show an initial decrease in response length, followed by a significant increase and then a period of fluctuation.
### Components/Axes
* **Title:** Average Response Length
* **X-axis:** Step, with markers at 0, 50, 100, 150, and 200.
* **Y-axis:** Response Length, with markers at 1100, 1200, 1300, 1400, and 1500.
* **Legend:** Located in the bottom-right corner.
* Blue line: GRPO (w/o PRM)
* Red line: AIRL-S (w. PRM)
### Detailed Analysis
* **GRPO (w/o PRM) - Blue Line:**
* Trend: Initially decreases from approximately 1200 at step 0 to a minimum of approximately 1120 around step 50. Then, it increases steadily to approximately 1400 around step 150. After step 150, it fluctuates between 1350 and 1450 until step 250.
* Data Points:
* Step 0: ~1200
* Step 50: ~1120
* Step 100: ~1250
* Step 150: ~1400
* Step 200: ~1450
* Step 250: ~1350
* **AIRL-S (w. PRM) - Red Line:**
* Trend: Starts at approximately 1250 at step 0, decreases to a minimum of approximately 1080 around step 50. Then, it increases sharply to approximately 1380 around step 150. After step 150, it fluctuates between 1300 and 1500 until step 250.
* Data Points:
* Step 0: ~1250
* Step 50: ~1080
* Step 100: ~1300
* Step 150: ~1380
* Step 200: ~1480
* Step 250: ~1400
### Key Observations
* Both algorithms experience a dip in response length around step 50.
* Both algorithms show a significant increase in response length between steps 50 and 150.
* After step 150, both algorithms exhibit fluctuations in response length.
* The AIRL-S algorithm generally has a slightly higher average response length than the GRPO algorithm, especially after step 150.
### Interpretation
The chart suggests that both GRPO (without PRM) and AIRL-S (with PRM) algorithms initially struggle to maintain a consistent response length, as indicated by the dip around step 50. However, both algorithms improve significantly between steps 50 and 150, leading to a substantial increase in response length. The fluctuations after step 150 indicate that the algorithms are still adapting and refining their responses. The AIRL-S algorithm, which incorporates PRM, tends to produce slightly longer responses on average compared to the GRPO algorithm, which does not use PRM. This could indicate that PRM contributes to more verbose or detailed responses.
</details>
Figure 4: Comparison of AIRL-S and GRPO trained with outcome rewards only. AIRL-S improves training and validation performance and enables longer response generation at test time.
Impact of PRM Aggregation Techniques.
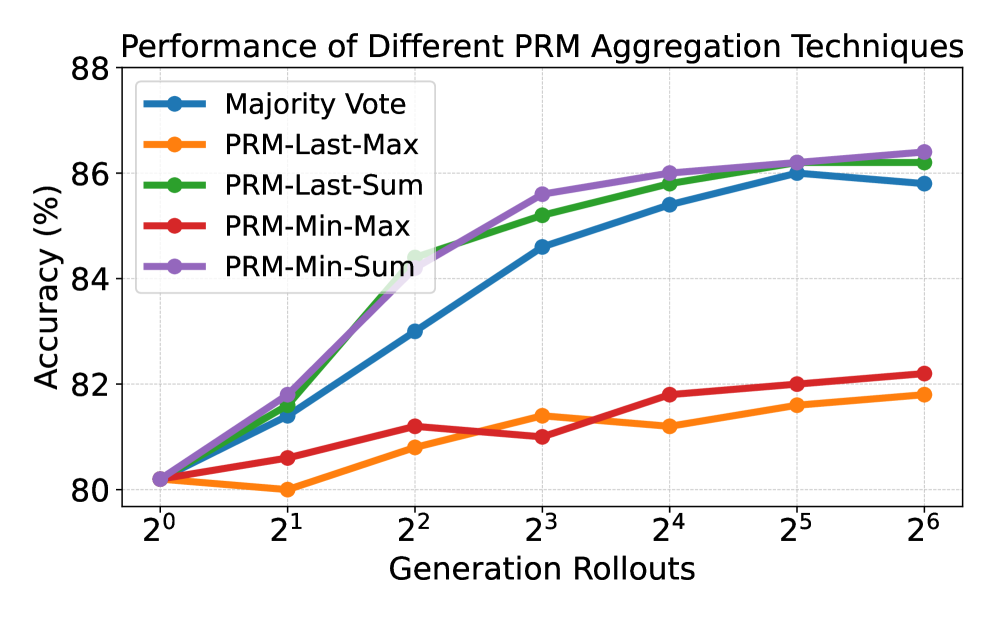
As described in Section 3.5 and Appendix A, different PRM aggregation techniques can select the final answer from multiple rollouts. We evaluate these techniques using our policy and PRM with Best-of-N search on MATH500; results of five aggregation techniques (defined in Appendix A) appear in Figure 5. PRM-Min-Vote and PRM-Last-Vote achieve the highest accuracy, showing that step-level rewards enable effective answer aggregation. In contrast, PRM-Min-Max and PRM-Last-Max achieve the worst performance, demonstrating the importance of inter-answer aggregation via PRM weighted voting to integrated the answers from various rollouts.
<details>
<summary>x8.png Details</summary>
### Visual Description
## Line Chart: Performance of Different PRM Aggregation Techniques
### Overview
The image is a line chart comparing the performance of different PRM (presumably Probabilistic Roadmap) aggregation techniques. The chart plots accuracy (in percentage) against the number of generation rollouts (on a base-2 logarithmic scale). Five different PRM aggregation techniques are compared: Majority Vote, PRM-Last-Max, PRM-Last-Sum, PRM-Min-Max, and PRM-Min-Sum.
### Components/Axes
* **Title:** Performance of Different PRM Aggregation Techniques
* **X-axis:** Generation Rollouts (values: 2<sup>0</sup>, 2<sup>1</sup>, 2<sup>2</sup>, 2<sup>3</sup>, 2<sup>4</sup>, 2<sup>5</sup>, 2<sup>6</sup>)
* **Y-axis:** Accuracy (%) (values range from 80 to 88, with gridlines at each integer value)
* **Legend:** Located in the top-left corner, identifying each line by color and name:
* Blue: Majority Vote
* Orange: PRM-Last-Max
* Green: PRM-Last-Sum
* Red: PRM-Min-Max
* Purple: PRM-Min-Sum
### Detailed Analysis
* **Majority Vote (Blue):** Starts at approximately 80% accuracy at 2<sup>0</sup> rollouts. It increases sharply to approximately 81.5% at 2<sup>1</sup>, then to 83% at 2<sup>2</sup>, 84.5% at 2<sup>3</sup>, 85.5% at 2<sup>4</sup>, and plateaus around 86% at 2<sup>5</sup> and 2<sup>6</sup>.
* **PRM-Last-Max (Orange):** Starts at approximately 80% accuracy at 2<sup>0</sup> rollouts. It decreases slightly to approximately 79.8% at 2<sup>1</sup>, then increases to 81% at 2<sup>2</sup>, 81.5% at 2<sup>3</sup>, 81.2% at 2<sup>4</sup>, 81.7% at 2<sup>5</sup>, and 81.8% at 2<sup>6</sup>.
* **PRM-Last-Sum (Green):** Starts at approximately 80% accuracy at 2<sup>0</sup> rollouts. It increases sharply to approximately 81.8% at 2<sup>1</sup>, then to 84% at 2<sup>2</sup>, 85.5% at 2<sup>3</sup>, 86% at 2<sup>4</sup>, and plateaus around 86.2% at 2<sup>5</sup> and 2<sup>6</sup>.
* **PRM-Min-Max (Red):** Starts at approximately 80% accuracy at 2<sup>0</sup> rollouts. It increases slightly to approximately 80.5% at 2<sup>1</sup>, then to 81.2% at 2<sup>2</sup>, 81% at 2<sup>3</sup>, 81.8% at 2<sup>4</sup>, 82% at 2<sup>5</sup>, and 82.2% at 2<sup>6</sup>.
* **PRM-Min-Sum (Purple):** Starts at approximately 80% accuracy at 2<sup>0</sup> rollouts. It increases sharply to approximately 82% at 2<sup>1</sup>, then to 83% at 2<sup>2</sup>, 85% at 2<sup>3</sup>, 86% at 2<sup>4</sup>, and plateaus around 86.5% at 2<sup>5</sup> and 2<sup>6</sup>.
### Key Observations
* PRM-Min-Sum and PRM-Last-Sum achieve the highest accuracy among the tested techniques, closely followed by Majority Vote.
* PRM-Min-Max and PRM-Last-Max consistently show lower accuracy compared to the other techniques.
* All techniques show the most significant increase in accuracy between 2<sup>0</sup> and 2<sup>4</sup> generation rollouts. After 2<sup>4</sup>, the accuracy plateaus for most techniques.
### Interpretation
The chart demonstrates the performance of different PRM aggregation techniques as the number of generation rollouts increases. The PRM-Min-Sum and PRM-Last-Sum methods appear to be the most effective in terms of achieving higher accuracy. The plateauing of accuracy after 2<sup>4</sup> rollouts suggests a point of diminishing returns, where increasing the number of rollouts provides minimal improvement in performance. The relatively poor performance of PRM-Min-Max and PRM-Last-Max indicates that these aggregation methods may not be as suitable for this particular application.
</details>
Figure 5: Performance of different PRM aggregation techniques evaluated on MATH500.
Table 2: Comparison of our policy model and PRM with PRIME [11] train on the same setting. AIRL-S consistently outperforms PRIME both with and without test-time search. AIME, MATH, and BoN denote AIME2024, MATH500, and Best-of-N, respectively.
| PRIME PRIME w. BoN AIRL-S | 16.7 20.0 26.7 | 55.4 62.7 59.0 | 78.4 84.2 80.2 | 50.2 55.6 55.3 |
| --- | --- | --- | --- | --- |
| AIRL-S w. BoN | 30.0 | 67.5 | 86.4 | 61.3 |
Comparison with Concurrent Implicit PRM Methods.
We compare AIRL-S with PRIME [11], which trains a policy-dependent dense reward function based on [79]. Both methods are trained on Qwen2.5-7B-Instruct under identical settings. At inference, we apply Best-of-N search under 64 rollouts with each method’s PRM. Results on AIME2024, AMC, and MATH500 in Table 2 show that our policy and PRM combination outperforms PRIME, further confirming that AIRL-S unifies RL-based and search-based TTS.
5 Conclusion
In this paper, we present AIRL-S , a framework that unifies RL-based and search-based TTS for LLMs. AIRL-S integrates AIRL with GRPO to learn a step-wise PRM from reference rollouts without any labeled data. This PRM guides both RL training by improving training stability and sample efficiency, and inference search by extending reasoning chains and mitigating reward hacking. We evaluate AIRL-S on eight benchmarks covering mathematics, scientific reasoning, and code generation. The results show that AIRL-S significantly improves the performance of base models and outperforms existing RL-trained and imitation-based methods. The PRM generalizes across different LLMs, datasets, and search algorithms, consistently enhancing test-time search performance. These findings validate that unifying RL-based and search-based TTS offers an efficient and robust approach for complex reasoning.
References
- [1] P. Abbeel and A. Y. Ng (2004) Apprenticeship learning via inverse reinforcement learning. In Proceedings of the twenty-first international conference on Machine learning, pp. 1. Cited by: §2.
- [2] M. Abdin, J. Aneja, H. Behl, S. Bubeck, R. Eldan, S. Gunasekar, M. Harrison, R. J. Hewett, M. Javaheripi, P. Kauffmann, et al. (2024) Phi-4 technical report. arXiv preprint arXiv:2412.08905. Cited by: Appendix D, §4.1.
- [3] Y. Bai, A. Jones, K. Ndousse, A. Askell, A. Chen, N. DasSarma, D. Drain, S. Fort, D. Ganguli, T. Henighan, et al. (2022) Training a helpful and harmless assistant with reinforcement learning from human feedback. arXiv preprint arXiv:2204.05862. Cited by: §1.
- [4] B. Brown, J. Juravsky, R. Ehrlich, R. Clark, Q. V. Le, C. Ré, and A. Mirhoseini (2024) Large language monkeys: scaling inference compute with repeated sampling. arXiv preprint arXiv:2407.21787. Cited by: §2.
- [5] D. Carraro and D. Bridge (2024) Enhancing recommendation diversity by re-ranking with large language models. ACM Transactions on Recommender Systems. Cited by: §2.
- [6] A. J. Chan, H. Sun, S. Holt, and M. Van Der Schaar (2024) Dense reward for free in reinforcement learning from human feedback. In Proceedings of the 41st International Conference on Machine Learning, pp. 6136–6154. Cited by: §1.
- [7] M. Chen, J. Tworek, H. Jun, Q. Yuan, H. Pinto, J. Kaplan, et al. (2021) Evaluating large language models trained on code. arXiv preprint arXiv:2107.03374. External Links: Link Cited by: Table 5, §4.1.
- [8] P. F. Christiano, J. Leike, T. B. Brown, M. Martic, S. Legg, and D. Amodei (2017) Deep reinforcement learning from human preferences. In Advances in Neural Information Processing Systems 30 (NIPS 2017), pp. 4299–4307. External Links: Link Cited by: §2.
- [9] K. Cobbe, V. Kosaraju, M. Bavarian, M. Chen, H. Jun, L. Kaiser, M. Plappert, J. Tworek, J. Hilton, R. Nakano, et al. (2021) Training verifiers to solve math word problems. arXiv preprint arXiv:2110.14168. Cited by: §1.
- [10] T. Coignion, C. Quinton, and R. Rouvoy (2024) A performance study of llm-generated code on leetcode. arXiv preprint arXiv:2407.21579. External Links: Link Cited by: Table 5, §4.1.
- [11] G. Cui, L. Yuan, Z. Wang, et al. (2025) Process reinforcement through implicit rewards. arXiv preprint arXiv:2502.01456. External Links: Link Cited by: Table 3, §2, §4.1, §4.3, Table 2.
- [12] DeepSeek-AI (2024) DeepSeek-math-7b-rl: reinforcement learning enhanced math reasoning model. Note: GitHub repository External Links: Link Cited by: §1, §1, §2.
- [13] C. Finn, P. Christiano, P. Abbeel, and S. Levine (2016) A connection between generative adversarial networks, inverse reinforcement learning, and energy-based models. arXiv preprint arXiv:1611.03852. Cited by: §1, §2, §3.3.
- [14] J. Fu, K. Luo, and S. Levine (2018) Learning robust rewards with adverserial inverse reinforcement learning. In International Conference on Learning Representations, Cited by: §1, §2, §2, §3.3, §3.4.
- [15] B. Gao, F. Song, Z. Yang, Z. Cai, Y. Miao, Q. Dong, L. Li, C. Ma, L. Chen, R. Xu, Z. Tang, B. Wang, D. Zan, S. Quan, G. Zhang, L. Sha, Y. Zhang, X. Ren, T. Liu, and B. Chang (2024) Omni-math: a universal olympiad level mathematic benchmark for large language models. External Links: 2410.07985, Link Cited by: §B.3, Table 4.
- [16] L. Gao, J. Schulman, and J. Hilton (2023) Scaling laws for reward model overoptimization. In International Conference on Machine Learning, pp. 10835–10866. Cited by: §1.
- [17] D. Garg, S. Chakraborty, C. Cundy, J. Song, and S. Ermon (2021) IQ-learn: inverse soft-$q$ learning for imitation. In NeurIPS 2021 Spotlight, External Links: Link Cited by: §2.
- [18] I. Goodfellow, J. Pouget-Abadie, M. Mirza, B. Xu, D. Warde-Farley, S. Ozair, A. Courville, and Y. Bengio (2020) Generative adversarial networks. Communications of the ACM 63 (11), pp. 139–144. Cited by: §2, §3.3.
- [19] Google Research, J. Austin, A. Odena, M. Nye, M. Bosma, H. Michalewski, D. Dohan, E. Jiang, C. Cai, M. Terry, Q. Le, et al. (2021) MBPP-sanitized. Note: Hugging Face DatasetsSanitized split of the MBPP benchmark External Links: Link Cited by: Table 5, §4.1.
- [20] D. Guo, D. Yang, H. Zhang, J. Song, R. Zhang, R. Xu, Q. Zhu, S. Ma, P. Wang, X. Bi, et al. (2025) Deepseek-r1: incentivizing reasoning capability in llms via reinforcement learning. arXiv preprint arXiv:2501.12948. Cited by: Table 3, §1, §1, §1, §2, §3.4, §4.1.
- [21] J. Hejna and D. Sadigh (2023) Inverse preference learning: preference-based rl without a reward function. Vol. 36, pp. 18806–18827. Cited by: §2.
- [22] D. Hendrycks, S. Basart, S. Kadavath, M. Mazeika, A. Arora, E. Guo, C. Burns, S. Puranik, H. He, D. Song, and J. Steinhardt (2021) Measuring coding challenge competence with APPS. CoRR abs/2105.09938. External Links: Link, 2105.09938 Cited by: §B.3, §B.4, Table 4.
- [23] D. Hendrycks, C. Burns, S. Kadavath, A. Arora, S. Basart, E. Tang, D. Song, and J. Steinhardt (2021) Measuring mathematical problem solving with the math dataset. In Advances in Neural Information Processing Systems (NeurIPS), External Links: Link Cited by: Table 5, §4.1.
- [24] B. Hui, J. Yang, Z. Cui, J. Yang, D. Liu, L. Zhang, T. Liu, J. Zhang, B. Yu, K. Lu, et al. (2024) Qwen2. 5-coder technical report. arXiv preprint arXiv:2409.12186. Cited by: Table 3, §4.1.
- [25] R. Irvine, D. Boubert, V. Raina, A. Liusie, Z. Zhu, V. Mudupalli, A. Korshuk, Z. Liu, F. Cremer, V. Assassi, et al. (2023) Rewarding chatbots for real-world engagement with millions of users. arXiv preprint arXiv:2303.06135. Cited by: §2.
- [26] I. Jain, F. Zhang, W. Liu, et al. (2025) LiveCodeBench: holistic and contamination-free evaluation of llms for code. In International Conference on Learning Representations (ICLR) 2025, External Links: Link Cited by: Table 5, §4.1.
- [27] C. Jin, T. Che, H. Peng, Y. Li, D. Metaxas, and M. Pavone (2024) Learning from teaching regularization: generalizable correlations should be easy to imitate. Advances in Neural Information Processing Systems 37, pp. 966–994. Cited by: §1.
- [28] C. Jin, H. Peng, Q. Zhang, Y. Tang, D. N. Metaxas, and T. Che (2025) Two heads are better than one: test-time scaling of multi-agent collaborative reasoning. arXiv preprint arXiv:2504.09772. Cited by: §1.
- [29] M. Jin, W. Luo, S. Cheng, X. Wang, W. Hua, R. Tang, W. Y. Wang, and Y. Zhang (2024) Disentangling memory and reasoning ability in large language models. arXiv preprint arXiv:2411.13504. Cited by: §2.
- [30] M. Jin, Q. Yu, D. Shu, H. Zhao, W. Hua, Y. Meng, Y. Zhang, and M. Du (2024) The impact of reasoning step length on large language models. In Findings of the Association for Computational Linguistics ACL 2024, pp. 1830–1842. Cited by: §1.
- [31] L. Kocsis and C. Szepesvári (2006) Bandit based monte-carlo planning. In European conference on machine learning, pp. 282–293. Cited by: 3rd item.
- [32] J. Li, E. Beeching, L. Tunstall, B. Lipkin, R. Soletskyi, S. C. Huang, K. Rasul, L. Yu, A. Jiang, Z. Shen, Z. Qin, B. Dong, L. Zhou, Y. Fleureau, G. Lample, and S. Polu (2024) NuminaMath. Numina. Note: https://huggingface.co/datasets/AI-MO/NuminaMath-CoT Cited by: §B.3, §B.4, Table 4.
- [33] J. LI, E. Beeching, L. Tunstall, B. Lipkin, R. Soletskyi, S. C. Huang, K. Rasul, L. Yu, A. Jiang, Z. Shen, Z. Qin, B. Dong, L. Zhou, Y. Fleureau, G. Lample, and S. Polu (2024) NuminaMath. Numina. Note: [https://huggingface.co/AI-MO/NuminaMath-CoT](https://github.com/project-numina/aimo-progress-prize/blob/main/report/numina_dataset.pdf) Cited by: §4.1.
- [34] R. Li, J. Fu, B. Zhang, T. Huang, Z. Sun, C. Lyu, G. Liu, Z. Jin, and G. Li (2023) TACO: topics in algorithmic code generation dataset. arXiv preprint arXiv:2312.14852. Cited by: §B.3, Table 4.
- [35] Y. Li, Z. Lin, S. Zhang, Q. Fu, B. Chen, J. Lou, and W. Chen (2023) Making language models better reasoners with step-aware verifier. In Proceedings of the 61st Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pp. 5315–5333. Cited by: §1.
- [36] Y. Li, D. Choi, J. Chung, N. Kushman, J. Schrittwieser, R. Leblond, T. Eccles, J. Keeling, F. Gimeno, A. D. Lago, T. Hubert, P. Choy, C. de Masson d’Autume, I. Babuschkin, X. Chen, P. Huang, J. Welbl, S. Gowal, A. Cherepanov, J. Molloy, D. J. Mankowitz, E. S. Robson, P. Kohli, N. de Freitas, K. Kavukcuoglu, and O. Vinyals (2022) Competition-level code generation with alphacode. Science 378 (6624), pp. 1092–1097. External Links: Document, Link Cited by: §B.3, §B.4, Table 4.
- [37] H. Lightman, V. Kosaraju, Y. Burda, H. Edwards, B. Baker, T. Lee, J. Leike, J. Schulman, I. Sutskever, and K. Cobbe (2023) Let’s verify step by step. In The Twelfth International Conference on Learning Representations, Cited by: §1, §1.
- [38] A. Liu, B. Feng, B. Xue, B. Wang, B. Wu, C. Lu, C. Zhao, C. Deng, C. Zhang, C. Ruan, et al. (2024) Deepseek-v3 technical report. arXiv preprint arXiv:2412.19437. Cited by: Table 3, §4.1.
- [39] F. Liu et al. (2020) Learning to summarize from human feedback. In Proceedings of the 58th Annual Meeting of the Association for Computational Linguistics, pp. 583–592. Cited by: item (a).
- [40] S. Liu and M. Zhu (2022) Distributed inverse constrained reinforcement learning for multi-agent systems. Advances in Neural Information Processing Systems 35, pp. 33444–33456. Cited by: §2.
- [41] S. Liu and M. Zhu (2024) In-trajectory inverse reinforcement learning: learn incrementally before an ongoing trajectory terminates. Advances in Neural Information Processing Systems 37, pp. 117164–117209. Cited by: §2.
- [42] Y. Liu, H. Gao, S. Zhai, X. Jun, T. Wu, Z. Xue, Y. Chen, K. Kawaguchi, J. Zhang, and B. Hooi (2025) GuardReasoner: towards reasoning-based llm safeguards. arXiv preprint arXiv:2501.18492. Cited by: §2.
- [43] Y. Liu, S. Zhai, M. Du, Y. Chen, T. Cao, H. Gao, C. Wang, X. Li, K. Wang, J. Fang, J. Zhang, and B. Hooi (2025) GuardReasoner-vl: safeguarding vlms via reinforced reasoning. arXiv preprint arXiv:2505.11049. Cited by: §2.
- [44] A. Madaan, N. Tandon, P. Gupta, S. Hallinan, L. Gao, S. Wiegreffe, U. Alon, N. Dziri, S. Prabhumoye, Y. Yang, et al. (2023) Self-refine: iterative refinement with self-feedback. Advances in Neural Information Processing Systems 36, pp. 46534–46594. Cited by: §2.
- [45] Mathematical Association of America (2024) 2024 american invitational mathematics examination (aime i). Technical report Mathematical Association of America. External Links: Link Cited by: Table 5, §4.1.
- [46] Mathematical Association of America (2025) American Mathematics Competitions (AMC). Note: https://www.maa.org/student-programs/amc Accessed: 2025-05-05 Cited by: Table 5, §4.1.
- [47] Y. Miao, S. Zhang, L. Ding, R. Bao, L. Zhang, and D. Tao (2024) Inform: mitigating reward hacking in rlhf via information-theoretic reward modeling. In The Thirty-eighth Annual Conference on Neural Information Processing Systems, Cited by: §1.
- [48] N. Muennighoff, Z. Yang, W. Shi, X. L. Li, L. Fei-Fei, H. Hajishirzi, L. Zettlemoyer, P. Liang, E. Candès, and T. Hashimoto (2025) S1: simple test-time scaling. External Links: 2501.19393, Link Cited by: §B.3, Table 4.
- [49] N. Muennighoff, Z. Yang, W. Shi, X. L. Li, L. Fei-Fei, H. Hajishirzi, L. Zettlemoyer, P. Liang, E. Candès, and T. Hashimoto (2025) S1: simple test-time scaling. arXiv preprint arXiv:2501.19393. Cited by: Table 3, §1, §2, §2, §4.1.
- [50] W. Nie, N. Narodytska, and A. Patel (2018) Relgan: relational generative adversarial networks for text generation. In International conference on learning representations, Cited by: item (a), §3.3.
- [51] OpenAI (2024-11-20) GPT-4o system card. Technical report OpenAI. External Links: Link Cited by: Table 3, §4.1.
- [52] OpenAI (2024-09) Learning to reason with llms. External Links: Link Cited by: §1.
- [53] OpenAI (2024-12) OpenAI o1 system card. Technical report OpenAI. External Links: Link Cited by: §2.
- [54] L. Ouyang, J. Wu, X. Jiang, D. Almeida, C. L. Wainwright, P. Mishkin, C. Zhang, S. Agarwal, K. Slama, A. Ray, J. Schulman, J. Hilton, F. Kelvin, L. Miller, M. Simens, A. Askell, P. Welinder, P. Christiano, J. Leike, and R. Lowe (2022) Training language models to follow instructions with human feedback. arXiv preprint arXiv:2203.02155. External Links: Link Cited by: §2.
- [55] S. Park, X. Liu, Y. Gong, and E. Choi (2024) Ensembling large language models with process reward-guided tree search for better complex reasoning. Cited by: §2.
- [56] Qwen Team, A. Yang, B. Yang, B. Zhang, B. Hui, B. Zheng, B. Yu, C. Li, D. Liu, et al. (2024) Qwen2.5 technical report. arXiv preprint arXiv:2412.15115. External Links: Link Cited by: Table 3, §4.1.
- [57] A. Rashid, R. Wu, J. Grosse, A. Kristiadi, and P. Poupart (2024) A critical look at tokenwise reward-guided text generation. arXiv preprint arXiv:2406.07780. Cited by: item (a).
- [58] N. D. Ratliff, J. A. Bagnell, and M. A. Zinkevich (2006) Maximum margin planning. In Proceedings of the 23rd international conference on Machine learning, pp. 729–736. Cited by: §2.
- [59] D. Rein, B. Li, A. C. Stickland, J. Petty, R. Y. Pang, J. Dirani, J. Michael, and S. R. Bowman (2023) GPQA: a graduate-level google-proof q&a benchmark. arXiv preprint arXiv:2311.12022. External Links: Link Cited by: Table 5, §4.1.
- [60] Z. Shao, P. Wang, Q. Zhu, R. Xu, J. Song, X. Bi, H. Zhang, M. Zhang, Y. Li, Y. Wu, et al. (2024) Deepseekmath: pushing the limits of mathematical reasoning in open language models. arXiv preprint arXiv:2402.03300. Cited by: Table 3, §1, §4.1.
- [61] C. Snell, J. Lee, K. Xu, and A. Kumar (2024) Free process rewards without process labels. arXiv preprint arXiv:2412.01981. External Links: Link Cited by: §2.
- [62] C. V. Snell, J. Lee, K. Xu, and A. Kumar (2025) Scaling test-time compute optimally can be more effective than scaling LLM parameters. In The Thirteenth International Conference on Learning Representations, External Links: Link Cited by: §A.1, §1, §2, §3.5, §3.5.
- [63] N. Srinivas, A. Krause, S. M. Kakade, and M. W. Seeger (2012) Information-theoretic regret bounds for gaussian process optimization in the bandit setting. IEEE transactions on information theory 58 (5), pp. 3250–3265. Cited by: 3rd item.
- [64] M. Studio (2024) Codeforces–python submissions. Note: https://huggingface.co/datasets/MatrixStudio/Codeforces-Python-Submissions Cited by: §B.3, §B.4, Table 4.
- [65] G. Swamy, D. Wu, S. Choudhury, D. Bagnell, and S. Wu (2023) Inverse reinforcement learning without reinforcement learning. pp. 33299–33318. Cited by: §2.
- [66] J. Tan, K. Zhao, R. Li, J. X. Yu, C. Piao, H. Cheng, H. Meng, D. Zhao, and Y. Rong (2025) Can large language models be query optimizer for relational databases?. arXiv preprint arXiv:2502.05562. Cited by: §2.
- [67] G. Team, A. Kamath, J. Ferret, S. Pathak, N. Vieillard, R. Merhej, S. Perrin, T. Matejovicova, A. Ramé, M. Rivière, et al. (2025) Gemma 3 technical report. arXiv preprint arXiv:2503.19786. Cited by: Appendix D.
- [68] J. Uesato, N. Kushman, R. Kumar, F. Song, N. Siegel, L. Wang, A. Creswell, G. Irving, and I. Higgins (2022) Solving math word problems with process-and outcome-based feedback. arXiv preprint arXiv:2211.14275. Cited by: §1.
- [69] P. Wang, L. Li, Z. Shao, R. Xu, D. Dai, Y. Li, D. Chen, Y. Wu, and Z. Sui (2024) Math-shepherd: verify and reinforce llms step-by-step without human annotations. In Proceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (Volume 1: Long Papers), pp. 9426–9439. Cited by: §1, §1, §2, §4.1.
- [70] X. Wang, J. Wei, D. Schuurmans, Q. Le, E. Chi, S. Narang, A. Chowdhery, and D. Zhou (2022) Self-consistency improves chain of thought reasoning in language models. Cited by: §2, §4.2.
- [71] Z. Wang, X. Liu, H. Chen, S. Ermon, et al. (2023) Math-shepherd: verify and reinforce llms step-by-step. Note: arXiv preprint arXiv:2312.08935 External Links: Link Cited by: Table 3, §4.1.
- [72] R. J. Williams (1992) Simple statistical gradient-following algorithms for connectionist reinforcement learning. Machine learning 8, pp. 229–256. Cited by: §3.4.
- [73] Y. Wu, Z. Sun, S. Li, S. Welleck, and Y. Yang (2024) Inference scaling laws: an empirical analysis of compute-optimal inference for problem-solving with language models. arXiv preprint arXiv:2408.00724. Cited by: §2.
- [74] Y. Wu, Z. Sun, S. Li, S. Welleck, and Y. Yang (2025) Inference scaling laws: an empirical analysis of compute-optimal inference for LLM problem-solving. In The Thirteenth International Conference on Learning Representations, External Links: Link Cited by: §1.
- [75] Y. Xie, A. Goyal, W. Zheng, M. Kan, T. P. Lillicrap, K. Kawaguchi, and M. Shieh (2024) Monte carlo tree search boosts reasoning via iterative preference learning. arXiv preprint arXiv:2405.00451. Cited by: §2.
- [76] Y. Xie, K. Kawaguchi, Y. Zhao, J. X. Zhao, M. Kan, J. He, and M. Xie (2023) Self-evaluation guided beam search for reasoning. Advances in Neural Information Processing Systems 36, pp. 41618–41650. Cited by: §1, §2, §3.5.
- [77] W. Xiong, H. Zhang, N. Jiang, and T. Zhang (2024) An implementation of generative prm. GitHub. Note: https://github.com/RLHFlow/RLHF-Reward-Modeling Cited by: §4.1.
- [78] F. Yu, A. Gao, and B. Wang (2023) Outcome-supervised verifiers for planning in mathematical reasoning. arXiv preprint arXiv:2311.09724 2 (6). Cited by: §1.
- [79] L. Yuan, W. Li, H. Chen, G. Cui, N. Ding, K. Zhang, B. Zhou, Z. Liu, and H. Peng (2024) Free process rewards without process labels. arXiv preprint arXiv:2412.01981. Cited by: §1, §4.1, §4.3.
- [80] S. Yuan, Z. Chen, Z. Xi, J. Ye, Z. Du, and J. Chen (2025) Agent-r: training language model agents to reflect via iterative self-training. arXiv preprint arXiv:2501.11425. Cited by: §2.
- [81] X. Yue, X. Qu, G. Zhang, Y. Fu, W. Huang, H. Sun, Y. Su, and W. Chen (2023) Mammoth: building math generalist models through hybrid instruction tuning. Cited by: §2.
- [82] D. Zhang, J. Wu, J. Lei, T. Che, J. Li, T. Xie, X. Huang, S. Zhang, M. Pavone, Y. Li, et al. (2024) Llama-berry: pairwise optimization for o1-like olympiad-level mathematical reasoning. arXiv preprint arXiv:2410.02884. Cited by: §1, §2.
- [83] S. Zhang, Z. Chen, Y. Shen, M. Ding, J. B. Tenenbaum, and C. Gan (2023) Planning with large language models for code generation. arXiv preprint arXiv:2303.05510. Cited by: §1, §2.
- [84] X. Zhang, C. Du, T. Pang, Q. Liu, W. Gao, and M. Lin (2024) Chain of preference optimization: improving chain-of-thought reasoning in llms. Advances in Neural Information Processing Systems 37, pp. 333–356. Cited by: §2.
- [85] A. Zhou, K. Yan, M. Shlapentokh-Rothman, H. Wang, and Y. Wang (2024) Language agent tree search unifies reasoning, acting, and planning in language models. In Proceedings of the 41st International Conference on Machine Learning, pp. 62138–62160. Cited by: §1, §2, §3.5.
- [86] B. D. Ziebart, J. A. Bagnell, and A. K. Dey (2010) Modeling interaction via the principle of maximum causal entropy. Cited by: §2.
- [87] B. D. Ziebart, A. L. Maas, J. A. Bagnell, and A. K. Dey (2008) Maximum entropy inverse reinforcement learning. In Proceedings of the 23rd AAAI Conference on Artificial Intelligence (AAAI ’08), pp. 1433–1438. External Links: Link Cited by: §2.
Appendix A Details for Search-based TTS
A.1 PRM Aggregation Techniques
Answer Aggregation.
After search, we obtain $N$ candidate reasoning chains for each question $q$ . Following Snell et al. [62], we compute a step-wise aggregation score for each chain by either taking the minimum PRM reward across its steps or using the reward of its final step. For inter-answer aggregation, we either select the answer whose chain has the highest step-wise score (Maximum Score) or sum the step-wise scores of all chains that produce the same answer and choose the answer with the highest total (Sum Score).
Step-wise Aggregation.
For each reasoning chain, we compute its score by one of two methods:
- Minimum Step Reward: Use the minimum PRM reward among all steps in the chain.
- Last Step Reward: Use the PRM reward at the chain’s final step.
Inter-answer Aggregation.
After computing step-wise scores, we aggregate across chains that yield the same final answer using one of two methods:
- Maximum Score: Select the answer of the chain with the highest step-wise score.
- Sum Score: Sum the step-wise scores of all chains with the same answer and select the answer with the highest total.
These choices yield four PRM aggregation methods:
- PRM-Min-Max: Minimum Step Reward + Maximum Score.
- PRM-Min-Sum: Minimum Step Reward + Sum Score.
- PRM-Last-Max: Last Step Reward + Maximum Score.
- PRM-Last-Sum: Last Step Reward + Sum Score.
In addition, we include Majority Vote, which selects the final answer that appears most frequently among all reasoning chains.
A.2 Test-Time Search Techniques
Best-of-N Sampling.
We sample $N$ complete chains of thought (CoTs) from the policy $\pi_{\theta}(·\mid q)$ . By default, we aggregate candidates using the PRM-Min-Sum method described in Section 3.5.
Beam Search.
We adopt the BFS-V implementation with beam size $N$ and beam width $M$ :
1. Generate $N$ initial proposals from $\pi_{\theta}$ .
1. Score each proposal using the PRM’s step-wise reward.
1. Retain the top $\tfrac{N}{M}$ proposals.
1. For each surviving proposal, sample $M$ next-step candidates and return to Step 2.
Repeat until $N$ complete solutions are generated. By default, we aggregate candidates with PRM-Min-Sum (Section 3.5).
Monte Carlo Tree Search (MCTS).
MCTS combines exploration via UCT with PRM-based value estimation:
1. Selection. From the root, traverse by choosing the child $n$ that maximizes
$$
\mathrm{UCT}(n)=\mu_{n}+\alpha\sqrt{\frac{\ln N_{\mathrm{parent}}}{N_{n}}},
$$
where $\mu_{n}$ is the cumulative PRM reward of all future steps, $N_{\mathrm{parent}}$ and $N_{n}$ are the visit counts of the parent and current node, respectively, and $\alpha=1.25$ by default.
1. Expansion. At a leaf node, generate $M$ new steps from $\pi_{\theta}$ .
1. Simulation. Roll out each new node to completion (temperature 0) and use the terminal PRM reward as the node’s value.
1. Backpropagation. Update $\mu_{n}$ , $N_{\mathrm{parent}}$ , and $N_{n}$ along the selected path.
Terminate when $N$ complete solutions are obtained. By default, we use PRM-Min-Sum to aggregate candidates (Section 3.5).
Self-Consistency.
We sample $N$ CoTs from $\pi_{\theta}$ without PRM guidance and aggregate answers by majority vote (see Appendix A). Self-Consistency exploits output diversity but does not use any PRM feedback.
Appendix B Implementation Details
B.1 Prompts
By defaul, we the same CoT prompts for both training and evaluation. The CoT prompt in our experiments are indicated in Table B.1.
| Mathematical/Scientific Reasoning Coding | Please reason step by step, and put your final answer within \\boxed{Your answer}. Write Python code to solve the problem. Please reason step by step and present the code in ’’’python YOUR CODE’’’ at the end. |
| --- | --- |
B.2 Models
To clarify the context of our empirical study, Table 3 summarises the LLMs we utilized in our experiments, detailing their backbone architectures and key training procedures.
Table 3: Overview of LLMs used in our experiments.
| Eurus-2-7B-PRIME | Qwen2.5-Math-7B | Training by two stages: (i) supervised fine-tuning on the Eurus instruction corpus; (ii) online RL with PRIME implicit process reward using GSM8K, MATH, and synthetic Chain-of-Thought data [11]. |
| --- | --- | --- |
| DeepSeek-Math-7B-RL | DeepSeek-R1-7B | SFT on DeepSeekMath-Instruct (800 K math CoT pairs) followed by GRPO reinforcement learning [60]. |
| Math-Shepherd-Mistral-7B-RL | Mistral-7B | PRM-guided step-wise PPO training on MetaMATH and MATH Level-5 problems [71]. |
| Qwen-2.5-Math-7B-Instruct | Qwen-2.5 | Supervised fine-tuning on 200 K math instructions plus RLHF preference optimization [24]. |
| DeepSeek-R1 | - | Four-stage pipeline: pre-training on 1.2T tokens, SFT, RLHF, and DPO. Public endpoint deepseek-ai/DeepSeek-R1. We use this model for inference based on the togather API [20]. |
| DeepSeek-V3 | - | Continued bilingual web-scale pre-training on DeepSeek-R1, followed by alignment stages; version tag 0324. We use this model for inference based on the togather API [38]. |
| s1.1-7B | Qwen2.5-7B-Instruct | Few-shot SFT and low-resource RL on $≈$ 1K GPT-4–generated reasoning tasks (s1K-1.1) [49]. |
| Qwen-2.5-7B-Instruct | - | 2M general instruction pairs plus RLHF; supports 131K-token context [56]. |
| DeepSeek-R1-Distill-Qwen-7B | Qwen2.5-Math-7B | Distillation of DeepSeek-R1 pseudo-labels into Qwen-7B for reduced inference cost. |
| GPT-4o | - | OpenAI RLHF pipeline; accessed via chat/completions with model gpt-4o-2024-11-20. We use this model for inference based on the OpenAI API [51]. |
B.3 Training Datasets
Our training datasets consist of math questions sampled from NuminaMath [32], openaimath [48], Omni-MATH [15], and code questions sampled APPS [22], CodeContests [36], TACO [34], and Codeforces [64]. The detailed information of our training dataset is indicated in Table 4.
Table 4: Training dataset source in our experiments.
| Dataset | # Questions | Introduction |
| --- | --- | --- |
| Mathematical Reasoning | | |
| NuminaMath | 125K | Olympiad-level competition problems with chain-of-thought solutions; the metric is exact-match accuracy [32]. |
| Openaimath | 12K | Competition-style questions released by OpenAI, spanning algebra, combinatorics, geometry, etc.; metric is exact-match accuracy [48]. |
| Omni-MATH | 4K | Universal Olympiad-level problems covering 8 subjects and 6 difficulty tiers; evaluated via exact-match correctness [15]. |
| Coding | | |
| APPS | 3K | Real-world programming challenges of varying difficulty; graded by hidden unit tests— metric is Pass@1 [22]. |
| CodeContests | 3K | Codeforces-style contest tasks curated for AlphaCode; metric is Pass@1 [36]. |
| TACO | 10K | Algorithmic coding problems grouped by topic and difficulty; metric is Pass@1 [34]. |
| Codeforces | 3K | A cleaned subset of Python submissions from Codeforces transformed into standalone tasks; metric is Pass@1 [64]. |
B.4 Validation Datasets
Our validation dataset is sampled from NuminaMath [32], APPS [22], CodeContests [36], and Codeforces [64] with a total of 2K mathematical and coding questions.
B.5 Evaluation Tasks
For completeness, Table 5 enumerates the evaluation tasks—covering mathematical/scientific reasoning, and code generation—on which we evaluate all systems throughout this paper.
Table 5: Introduction of evaluation tasks used in our experiments.
| Dataset Mathematical/Scientific Reasoning AIME2024 | Introduction American Invitational Mathematics Examination 2024. Two papers (AIME I & II) with 15 questions each, for a total of 30 short-answer problems. We evaluate exact‐match answer accuracy and average across three random seeds for stability [45]. |
| --- | --- |
| AMC | All come from AMC12 2022, AMC12 2023 with 83 multiple-choice questions. Models must output the correct option; metric is accuracy [46]. |
| MATH500 | A subset of the MATH benchmark containing 500 competition problems spanning seven topics and five difficulty levels. We report accuracy [23] . |
| GPQA-Diamond | High-quality slice of GPQA with 198 graduate-level multiple-choice questions in biology, chemistry and physics [59]. We report accuracy. |
| Coding Tasks | |
| HumanEval | Classic Python code-generation set with 164 functions, each graded by unit tests. We report Pass@1 [7]. |
| MBPP | Sanitized version of Mostly Basic Python Problems comprising 427 hand-verified tasks; Pass@1 is reported [19]. |
| LeetCode | 180 LeetCode tasks including 45 Easy, 91 Medium and 44 Hard; we convert to Python and grade with official test cases, reporting Pass@1 [10]. |
| LiveCodeBench | Continually-updated contest benchmark. We use releases v4 with 776 tasks; metric is Pass@1 [26]. |
Appendix C Additional Results
The detailed performance of each LLM-PRM combination using Best-of-N with 64 rollouts on AIME2024, AMC, and MATH500 are shown in Figure 6, Figure 7 and Figure 8, respectively. Our policy model combined with our PRM consistently achieves the best performance in all datasets and LLM-PRM combinations, demonstrating the effectiveness of AIRL-S in unifying RL-based and Search-based TTS.
<details>
<summary>x9.png Details</summary>
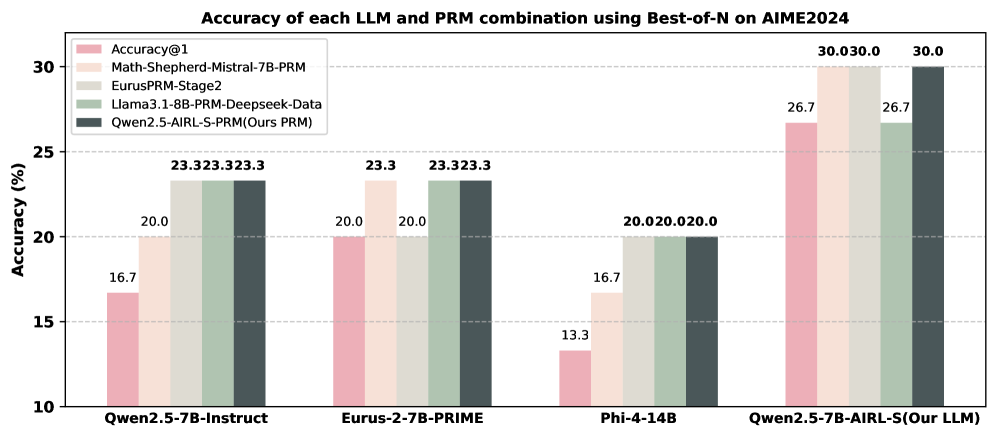
### Visual Description
## Bar Chart: Accuracy of LLM and PRM Combinations
### Overview
The image is a bar chart comparing the accuracy of different Large Language Models (LLMs) and Prompt Relation Modeling (PRM) combinations on the AIME2024 dataset, using a "Best-of-N" approach. The chart displays the accuracy percentages for each LLM/PRM combination.
### Components/Axes
* **Title:** Accuracy of each LLM and PRM combination using Best-of-N on AIME2024
* **Y-axis:** Accuracy (%), with ticks at 10, 15, 20, 25, and 30.
* **X-axis:** Categorical axis representing different LLM/PRM combinations:
* Qwen2.5-7B-Instruct
* Eurus-2-7B-PRIME
* Phi-4-14B
* Qwen2.5-7B-AIRL-S(Our LLM)
* **Legend:** Located at the top-left of the chart, it identifies the different PRM strategies:
* Accuracy@1 (light pink)
* Math-Shepherd-Mistral-7B-PRM (light orange)
* EurusPRM-Stage2 (light gray)
* Llama3.1-8B-PRM-Deepseek-Data (light green)
* Qwen2.5-AIRL-S-PRM (Ours PRM) (dark gray)
### Detailed Analysis
The chart presents accuracy values for each LLM/PRM combination. The values are displayed above each bar.
* **Qwen2.5-7B-Instruct:**
* Accuracy@1: 16.7%
* Math-Shepherd-Mistral-7B-PRM: 20.0%
* EurusPRM-Stage2: 23.3%
* Llama3.1-8B-PRM-Deepseek-Data: 23.3%
* Qwen2.5-AIRL-S-PRM (Ours PRM): 23.3%
* **Eurus-2-7B-PRIME:**
* Accuracy@1: 20.0%
* Math-Shepherd-Mistral-7B-PRM: 20.0%
* EurusPRM-Stage2: 23.3%
* Llama3.1-8B-PRM-Deepseek-Data: 23.3%
* Qwen2.5-AIRL-S-PRM (Ours PRM): 23.3%
* **Phi-4-14B:**
* Accuracy@1: 13.3%
* Math-Shepherd-Mistral-7B-PRM: 16.7%
* EurusPRM-Stage2: 20.0%
* Llama3.1-8B-PRM-Deepseek-Data: 20.0%
* Qwen2.5-AIRL-S-PRM (Ours PRM): 20.0%
* **Qwen2.5-7B-AIRL-S(Our LLM):**
* Accuracy@1: 26.7%
* Math-Shepherd-Mistral-7B-PRM: 30.0%
* EurusPRM-Stage2: 26.7%
* Llama3.1-8B-PRM-Deepseek-Data: 30.0%
* Qwen2.5-AIRL-S-PRM (Ours PRM): 30.0%
### Key Observations
* The Qwen2.5-7B-AIRL-S(Our LLM) model generally achieves the highest accuracy across all PRM strategies.
* Phi-4-14B model has the lowest accuracy across all PRM strategies.
* The "Qwen2.5-AIRL-S-PRM (Ours PRM)" strategy consistently performs well across all LLMs.
### Interpretation
The bar chart illustrates the performance of different LLM and PRM combinations on the AIME2024 dataset. The results suggest that the choice of both the LLM and the PRM strategy significantly impacts the overall accuracy. The Qwen2.5-7B-AIRL-S(Our LLM) model, when combined with the Qwen2.5-AIRL-S-PRM, achieves the highest accuracy, indicating a potentially synergistic effect. The Phi-4-14B model shows the lowest performance, suggesting it may not be as effective for this particular task or dataset. The consistent performance of "Qwen2.5-AIRL-S-PRM (Ours PRM)" across different LLMs highlights its robustness and potential as a reliable PRM strategy.
</details>
Figure 6: Performance of applying four PRMs on four different generation LLMs using Best-of-N with 64 rollouts on AIME2024
<details>
<summary>x10.png Details</summary>
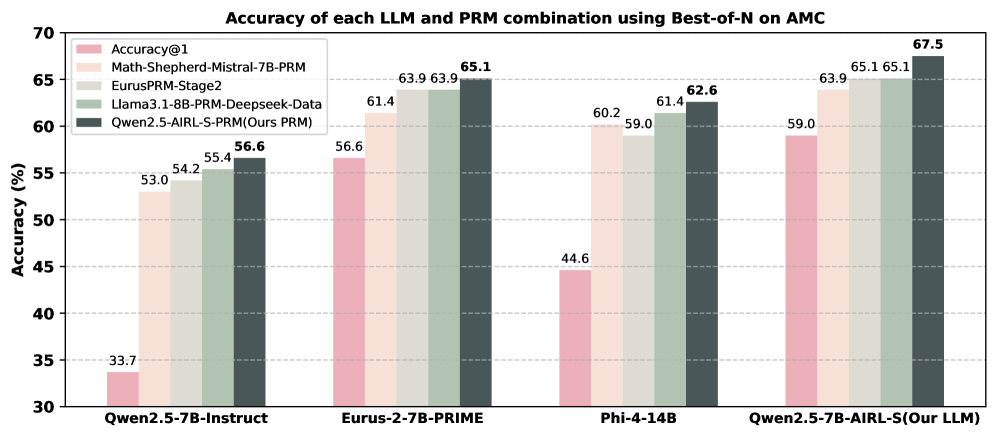
### Visual Description
## Bar Chart: Accuracy of LLM and PRM Combinations
### Overview
The image is a bar chart comparing the accuracy of different Large Language Model (LLM) and Prompt Relation Model (PRM) combinations using the Best-of-N method on the AMC dataset. The chart displays the accuracy (in percentage) on the y-axis and the LLM/PRM combinations on the x-axis. Each combination has five bars representing different models.
### Components/Axes
* **Title:** Accuracy of each LLM and PRM combination using Best-of-N on AMC
* **Y-axis:** Accuracy (%)
* Scale ranges from 30 to 70, with tick marks at intervals of 5 (30, 35, 40, 45, 50, 55, 60, 65, 70).
* **X-axis:** LLM/PRM Combinations (categorical)
* Qwen2.5-7B-Instruct
* Eurus-2-7B-PRIME
* Phi-4-14B
* Qwen2.5-7B-AIRL-S(Our LLM)
* **Legend:** (Located in the top-left corner)
* Accuracy@1 (Light Pink)
* Math-Shepherd-Mistral-7B-PRM (Light Beige)
* EurusPRM-Stage2 (Light Gray)
* Llama3.1-8B-PRM-Deepseek-Data (Dark Gray-Green)
* Qwen2.5-AIRL-S-PRM (Ours PRM) (Dark Gray)
### Detailed Analysis
The chart presents accuracy scores for each LLM/PRM combination across five different models.
* **Qwen2.5-7B-Instruct:**
* Accuracy@1: 33.7
* Math-Shepherd-Mistral-7B-PRM: 53.0
* EurusPRM-Stage2: 54.2
* Llama3.1-8B-PRM-Deepseek-Data: 55.4
* Qwen2.5-AIRL-S-PRM (Ours PRM): 56.6
* **Eurus-2-7B-PRIME:**
* Accuracy@1: 56.6
* Math-Shepherd-Mistral-7B-PRM: 61.4
* EurusPRM-Stage2: 63.9
* Llama3.1-8B-PRM-Deepseek-Data: 63.9
* Qwen2.5-AIRL-S-PRM (Ours PRM): 65.1
* **Phi-4-14B:**
* Accuracy@1: 44.6
* Math-Shepherd-Mistral-7B-PRM: 60.2
* EurusPRM-Stage2: 59.0
* Llama3.1-8B-PRM-Deepseek-Data: 61.4
* Qwen2.5-AIRL-S-PRM (Ours PRM): 62.6
* **Qwen2.5-7B-AIRL-S(Our LLM):**
* Accuracy@1: 59.0
* Math-Shepherd-Mistral-7B-PRM: 63.9
* EurusPRM-Stage2: 65.1
* Llama3.1-8B-PRM-Deepseek-Data: 65.1
* Qwen2.5-AIRL-S-PRM (Ours PRM): 67.5
### Key Observations
* The "Qwen2.5-AIRL-S-PRM (Ours PRM)" model (dark gray bar) consistently achieves the highest accuracy for each LLM/PRM combination, except for the "Eurus-2-7B-PRIME" combination where it is tied with "Llama3.1-8B-PRM-Deepseek-Data".
* "Accuracy@1" (light pink bar) generally shows the lowest accuracy compared to other models for each LLM/PRM combination.
* The "Qwen2.5-7B-AIRL-S(Our LLM)" combination achieves the highest overall accuracy of 67.5 with the "Qwen2.5-AIRL-S-PRM (Ours PRM)" model.
### Interpretation
The chart demonstrates the performance of different LLM and PRM combinations using the Best-of-N method on the AMC dataset. The results suggest that the "Qwen2.5-AIRL-S-PRM (Ours PRM)" model generally enhances the accuracy of various LLM/PRM combinations. The "Qwen2.5-7B-AIRL-S(Our LLM)" combination, when paired with the "Qwen2.5-AIRL-S-PRM (Ours PRM)" model, yields the highest accuracy among all tested combinations. The "Accuracy@1" model consistently underperforms compared to the other models, indicating that it may not be as effective in this specific context. The data highlights the importance of selecting appropriate models and combinations to optimize accuracy in LLM and PRM tasks.
</details>
Figure 7: Performance of applying four PRMs on four different generation LLMs using Best-of-N with 64 rollouts on AMC
<details>
<summary>x11.png Details</summary>
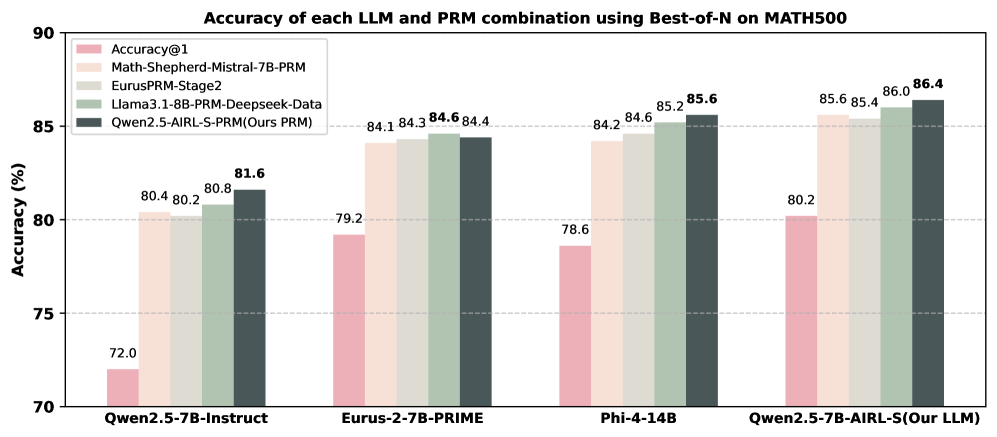
### Visual Description
## Bar Chart: Accuracy of LLM and PRM Combinations
### Overview
The image is a bar chart comparing the accuracy of different Large Language Model (LLM) and PRM (presumably a type of prompting or reasoning method) combinations on the MATH500 dataset, using a "Best-of-N" approach. The chart displays the accuracy percentages for each combination, with different colored bars representing different configurations.
### Components/Axes
* **Title:** Accuracy of each LLM and PRM combination using Best-of-N on MATH500
* **Y-axis:** Accuracy (%)
* Scale: 70 to 90, with gridlines at 75, 80, and 85.
* **X-axis:** Categorical, representing different LLM and PRM combinations:
* Qwen2.5-7B-Instruct
* Eurus-2-7B-PRIME
* Phi-4-14B
* Qwen2.5-7B-AIRL-S(Our LLM)
* **Legend:** Located in the top-left corner.
* Accuracy@1 (Pink)
* Math-Shepherd-Mistral-7B-PRM (Light Pink/Beige)
* EurusPRM-Stage2 (Light Grey/Off-White)
* Llama3.1-8B-PRM-Deepseek-Data (Green)
* Qwen2.5-AIRL-S-PRM(Ours PRM) (Dark Grey)
### Detailed Analysis
The chart presents accuracy data for four LLMs, each tested with five different PRM configurations. The accuracy values are displayed above each bar.
**Qwen2.5-7B-Instruct**
* Accuracy@1 (Pink): 72.0
* Math-Shepherd-Mistral-7B-PRM (Light Pink/Beige): 80.4
* EurusPRM-Stage2 (Light Grey/Off-White): 80.2
* Llama3.1-8B-PRM-Deepseek-Data (Green): 80.8
* Qwen2.5-AIRL-S-PRM(Ours PRM) (Dark Grey): 81.6
**Eurus-2-7B-PRIME**
* Accuracy@1 (Pink): 79.2
* Math-Shepherd-Mistral-7B-PRM (Light Pink/Beige): 84.1
* EurusPRM-Stage2 (Light Grey/Off-White): 84.3
* Llama3.1-8B-PRM-Deepseek-Data (Green): 84.6
* Qwen2.5-AIRL-S-PRM(Ours PRM) (Dark Grey): 84.4
**Phi-4-14B**
* Accuracy@1 (Pink): 78.6
* Math-Shepherd-Mistral-7B-PRM (Light Pink/Beige): 84.2
* EurusPRM-Stage2 (Light Grey/Off-White): 84.6
* Llama3.1-8B-PRM-Deepseek-Data (Green): 85.2
* Qwen2.5-AIRL-S-PRM(Ours PRM) (Dark Grey): 85.6
**Qwen2.5-7B-AIRL-S(Our LLM)**
* Accuracy@1 (Pink): 80.2
* Math-Shepherd-Mistral-7B-PRM (Light Pink/Beige): 85.6
* EurusPRM-Stage2 (Light Grey/Off-White): 85.4
* Llama3.1-8B-PRM-Deepseek-Data (Green): 86.0
* Qwen2.5-AIRL-S-PRM(Ours PRM) (Dark Grey): 86.4
### Key Observations
* The "Accuracy@1" configuration (pink bars) consistently shows the lowest accuracy for each LLM.
* The "Qwen2.5-AIRL-S-PRM(Ours PRM)" configuration (dark grey bars) generally achieves the highest accuracy for each LLM, or is very close to the highest.
* The LLM "Qwen2.5-7B-AIRL-S(Our LLM)" achieves the highest overall accuracy of 86.4% when combined with "Qwen2.5-AIRL-S-PRM(Ours PRM)".
* The LLM "Qwen2.5-7B-Instruct" has the lowest accuracy across all PRM combinations compared to the other LLMs.
### Interpretation
The data suggests that the choice of PRM significantly impacts the accuracy of LLMs on the MATH500 dataset. The "Qwen2.5-AIRL-S-PRM(Ours PRM)" configuration appears to be the most effective PRM across all tested LLMs. The "Accuracy@1" configuration, likely representing a baseline or simpler prompting method, consistently underperforms compared to the other PRMs. The LLM "Qwen2.5-7B-AIRL-S(Our LLM)" combined with "Qwen2.5-AIRL-S-PRM(Ours PRM)" demonstrates the best performance overall, indicating a potentially synergistic effect between this specific LLM and PRM combination. The relatively lower performance of "Qwen2.5-7B-Instruct" suggests that its architecture or training might be less suited for the MATH500 task compared to the other LLMs.
</details>
Figure 8: Performance of applying four PRMs on four different generation LLMs using Best-of-N with 64 rollouts on MATH500
Appendix D Limitations
While our experiments demonstrate that AIRL-S effectively unifies RL-based and search-based TTS across multiple test-time search algorithms using a single policy model and PRM, we have not tested its scalability on other base model architectures such as Phi-4 [2] and Gemma-3 [67]. We also have not studied how training dataset size affects AIRL-S ’s performance. Future work will evaluate AIRL-S on larger language models and more extensive datasets, including tasks with more difficult reasoning questions.
Appendix E Broader Impacts
Large‐scale reward-model-guided reinforcement learning (RL) and test-time search (TTS) can amplify the reasoning power of language models, lowering the barrier to advanced problem solving. Positive impacts include: (i) Scientific acceleration —open-sourced PRMs provide a drop-in verifier for symbolic mathematics and formal-methods research, potentially shortening proof discovery cycles; (ii) Educational equity —a modest-sized model fine-tuned with our AIRL-S pipeline attains near-GPT-4o performance, enabling free or low-cost tutoring tools in under-resourced regions; (iii) Software reliability —the PRM can rank candidate patches during code repair, reducing latent defects in safety-critical systems.
Negative impacts and misuse scenarios. Disinformation : stronger mathematical/verbal reasoning could automate generation of persuasive but false technical content. Fairness & bias : reward models inherit biases present in demonstrations; these biases can be amplified by MCTS selection. Dual-use : chain-level reward shaping may help adversaries explore large search spaces (e.g. exploit generation, surveillance analytics). Labour displacement : automating competitive-programming-style tasks might displace junior software-engineering roles.