# EvolveR: Self-Evolving LLM Agents through an Experience-Driven Lifecycle
> These authors contributed equally.corresponding author
Abstract
Current Large Language Model (LLM) agents show strong performance in tool use, but lack the crucial capability to systematically learn from their own experiences. While existing frameworks mainly focus on mitigating external knowledge gaps, they fail to address a more fundamental limitation: the inability to iteratively refine problem-solving strategies. In this work, we introduce EvolveR, a framework designed to enable agent to self-improve through a complete, closed-loop experience lifecycle. This lifecycle comprises two key stages: (1) Offline Self-Distillation, where the agent’s interaction trajectories are synthesized into a structured repository of abstract, reusable strategic principles; (2) Online Interaction, where the agent interacts with tasks and actively retrieves distilled principles to guide its decision-making, accumulating a diverse set of behavioral trajectories. This loop employs a policy reinforcement mechanism to iteratively update the agent based on its performance. We demonstrate the effectiveness of EvolveR on complex multi-hop question-answering benchmarks, where it achieves superior performance over strong agentic baselines. Our work presents a comprehensive blueprint for agents that learn not only from external data but also from the consequences of their own actions, paving the way for more autonomous and continuously improving systems. Code is available at https://github.com/Edaizi/EvolveR.
1 Introduction
<details>
<summary>x1.png Details</summary>
### Visual Description
## Diagram: Comparative Analysis of Learning Paradigms
### Overview
The image presents a comparative diagram of four learning paradigms, each represented in a quadrant. The paradigms are labeled as follows:
1. **Paradigm 1: Stateless Execution**
2. **Paradigm 2: Learning by Raw Trajectories**
3. **Paradigm 3: Learning via External Scribbing**
4. **Paradigm 4: Self-Distillation & Evolution (Ours)**
Each quadrant illustrates the workflow, components, and interactions for solving tasks (Task 1 and Task 2) using agents, solutions, storage, and external models.
---
### Components/Axes
#### Key Elements:
- **Agents**: Represented by a robot icon, responsible for executing tasks.
- **Solutions**: Outputs generated by agents (e.g., Solution1, Solution2).
- **Storage**: Depicted as a filing cabinet or database, used to retain past experiences.
- **Teacher Model**: A human figure with a brain icon, symbolizing external knowledge or guidance.
- **External Experience (External Exp)**: A cloud-like icon representing external data sources.
- **Phases**: Online Phase (fire icon) and Offline Phase (snowflake icon) in Paradigm 4.
- **Arrows**: Indicate workflow direction (e.g., "Retrieve," "Discard," "Update").
#### Labels and Text:
- **Paradigm 1**: "Stateless Execution" (no memory of past tasks).
- **Paradigm 2**: "Learning by Raw Trajectories" (stores raw trajectories for reuse).
- **Paradigm 3**: "Learning via External Scribbing" (uses a teacher model and external storage).
- **Paradigm 4**: "Self-Distillation & Evolution (Ours)" (combines online and offline phases for agent evolution).
---
### Detailed Analysis
#### Paradigm 1: Stateless Execution
- **Flow**:
- Task 1 → Agent → Solution1 → Discard.
- Task 2 → Agent → Solution2 → Discard.
- **Key Feature**: No storage or reuse of past solutions. Each task is solved independently.
#### Paradigm 2: Learning by Raw Trajectories
- **Flow**:
- Task 1 → Agent → Solution1 → Storage.
- Task 2 → Agent → Retrieve Past Trajectory → Solution2 → Storage.
- **Key Feature**: Stores raw trajectories (e.g., Solution1) for reuse in subsequent tasks.
#### Paradigm 3: Learning via External Scribbing
- **Flow**:
- Task 1 → Agent → Solution1 → Teacher Model → Storage.
- Task 2 → Agent → Retrieve Past Exp → Solution2 → Storage.
- **Key Feature**: Relies on a teacher model to summarize solutions and store external experiences.
#### Paradigm 4: Self-Distillation & Evolution (Ours)
- **Flow**:
- **Online Phase**:
- Search ExpBase → Think Query → Generate Trajectory → Update Data → Distill Principle.
- **Offline Phase**:
- Agent (Initial) → Solution1 → Agent (Evolved) → Solution2.
- **Key Feature**: Combines online exploration (searching an experience base) and offline refinement (agent evolution) to improve performance iteratively.
---
### Key Observations
1. **Paradigm 1** is the simplest, with no memory or external dependencies.
2. **Paradigm 2** introduces storage but relies on raw, unprocessed trajectories.
3. **Paradigm 3** adds a teacher model and external storage, enabling guided learning.
4. **Paradigm 4** (proposed method) integrates self-distillation and evolution, allowing the agent to refine its approach over time.
---
### Interpretation
The diagram illustrates a progression from basic, stateless task execution (Paradigm 1) to advanced, self-improving systems (Paradigm 4). Paradigm 4 stands out by:
- **Self-Distillation**: Extracting principles from raw data to guide future decisions.
- **Evolution**: Iteratively improving the agent’s capabilities through offline refinement.
- **Hybrid Phases**: Balancing real-time exploration (Online Phase) with offline optimization (Offline Phase).
This approach suggests that combining external knowledge (via ExpBase) with internal agent evolution leads to more robust and adaptive solutions compared to stateless or externally dependent methods. The use of "Evolved" agents in Paradigm 4 implies a focus on long-term learning and adaptability, which could be critical for complex, dynamic environments.
</details>
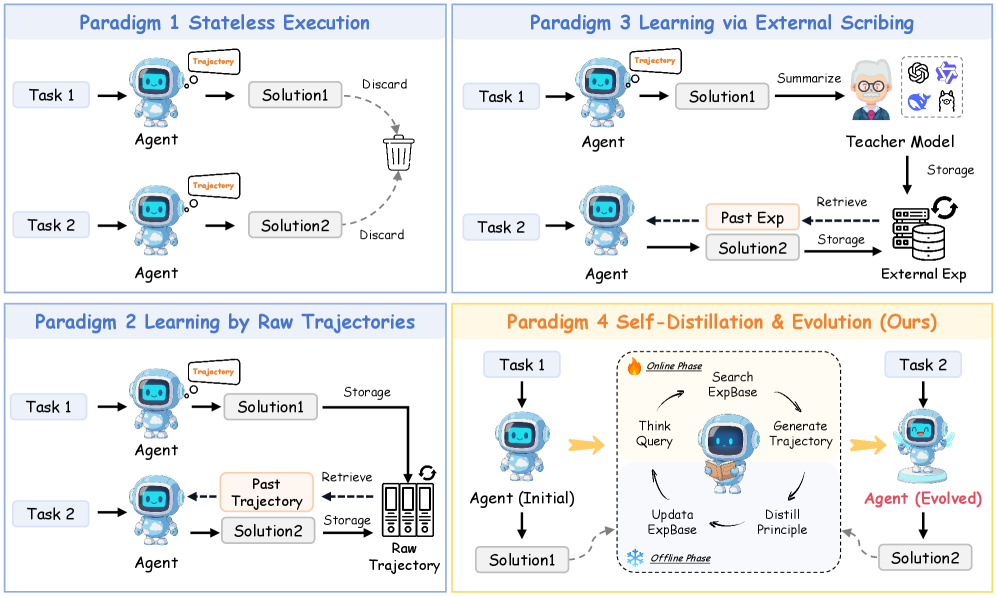
Figure 1: An illustration of four major paradigms for LLM agent learning. (1) Stateless Execution: Standard agents discard experiences after each task; (2) Learning by Raw Trajectories: Agents retrieve raw, un-distilled past trajectories; (3) Learning via External Scribing: Agents rely on an external teacher model to distill insights; (4) EvolveR (Ours): A complete, self-contained lifecycle where the agent autonomously distills its own experiences into principles and evolves its policy.
Large Language Models (LLMs) have driven the development of autonomous agents capable of solving diverse tasks through advanced reasoning and tool use [1, 2, 3]. However, a significant limitation emerges when these agents engage in sequential tasks: each interaction is treated independently. They approach tasks as isolated episodes, suffering from operational amnesia and failing to learn from past successes or avoid prior mistakes [4]. This inability to leverage experience fundamentally hinders their development toward greater autonomy and intelligence.
Humans, by contrast, learn through a continuous lifecycle, leveraging both successes and failures to refine strategies over time [5]. For example, a student solving math problems reflects on recurring errors and successful approaches to extract general problem-solving strategies. This cycle of interaction, reflection, and abstraction is the cornerstone of developing expertise [6]. Endowing LLM agents with a comparable lifecycle is the key to bridging the gap between episodic problem-solving and sustainable self-improvement. While existing frameworks like Retrieval-Augmented Generation (RAG) effectively address knowledge gaps, they fail to solve a more fundamental limitation: the agent’s inability to systematically learn from the consequences of its own interactions [7].
As Figure 1 shows, prior works have attempted to address this limitation, but with critical shortcomings. Researchers store natural language reflections across tasks with a powerful external LLM in an external memory [8, 9]. While resource-efficient, this approach treats such reflections as a transient hint, leaving the agent’s intrinsic policy unchanged. On the other hand, learning by recalling raw cases retrieves entire past trajectories to directly guide decision-making. However, this reliance on raw cases struggles to generalize and, more importantly, fails to abstract. The agent merely mimics past solutions instead of distilling the reusable strategic principles that made them successful [10].
To overcome these challenges, we introduce EvolveR, a framework that enables agents to self-evolve by utilizing their own experiences. EvolveR implements a full experience lifecycle, in which agents collect trajectories through Online Interaction, distill them into a library of abstract strategic principles during Offline Self-Distillation, and subsequently learn to apply these principles to new tasks. Crucially, EvolveR completes the experience lifecycle with a reinforcement learning mechanism that enables the agent to utilize experience. The agent does not merely mimic its past interactions; it evolves based on what it has learned. EvolveR maintains a dynamic experience base where newly distilled principles are semantically deduplicated and continuously evaluated via a metric score that tracks historical effectiveness.
We demonstrate EvolveR’s effectiveness on complex question-answering benchmarks, where it significantly outperforms strong agentic baselines. Our contributions can be summarized as follows:
- We propose the Experience-Driven Self-Evolution Paradigm, a novel, closed-loop lifecycle for LLM agents. In contrast to agents that forget past interactions, EvolveR systematically integrates a complete cycle of online interaction, offline experiences self-distillation and policy evolution. This process enables the agent to continuously transform raw trajectories into a curated repository of strategic principles, establishing a foundation for adaptive agents.
- We introduce a complete system for dynamic experiences curation. This system goes far beyond simple experience storage. It features: (1) a self-distillation mechanism, where the agent autonomously distills principles from previous interactions; and (2) a full maintenance pipeline, including semantic deduplication, integration, and quality control guided by a dynamic metric score.
- We provide extensive empirical validation of the EvolveR paradigm across multiple model scales. Our experiments on a diverse suite of complex QA benchmarks demonstrate the effectiveness of our approach. Detailed ablation studies confirm that the synergy of our proposed curation and self-distillation mechanisms is critical to the framework’s success, revealing a key insight: while the self-distillation mechanism is less effective on smaller-scale models, it surpasses distillation by a stronger, external teacher model at the 3B scale, validating the importance of cognitive alignment.
2 Related Work
2.1 Continual Learning and Self-Evolving Agents
Continual learning (CL) aims to enable models to learn sequentially while mitigating catastrophic forgetting [11, 12]. While various replay-based and regularization methods have been proposed, most CL paradigms assume predefined task boundaries and focus on knowledge preservation rather than active acquisition in open-ended environments [13, 14, 15, 16]. The pursuit of self-evolving agents moves beyond these limitations by enabling systems to grow autonomously from experience. Frameworks such as Reflexion and Generative Agents explore self-improvement through self-play and reflective reasoning, often storing past trajectories as memory to guide future actions [17, 18, 19, 20, 4]. However, these systems either store raw, unstructured data or rely on memory mechanisms that are not designed for the systematic, long-term distillation and refinement of abstract strategic knowledge. Instead of relying on external data streams, our agent autonomously generates and refines its own experiences through an iterative cycle of online interaction and offline reflection.
2.2 LLM Agents and Reinforcement Learning
LLM agents have been widely explored through frameworks such as ReAct, which interleaves reasoning and actions, and Reflecion, which improves task performance via self-reflection [4, 17]. While these approaches are primarily prompt-based and stateless, they prevent long-term accumulation of strategic knowledge. External memory frameworks like ExpeL address this limitation by reusing past trajectories, but they do not enable systematic self-improvement across tasks [8]. While effective, these methods often rely on simple prompting and are inherently stateless, limiting their ability to internalize knowledge across tasks. Recent work has increasingly turned to reinforcement learning (RL) to train agents for long-horizon, multi-turn tasks. However, applying RL is challenging due to sparse rewards and the need for stable training signals. Search-R1 [21], O2-Searcher [22], and AutoRefine [23] all use RL to train LLMs to generate and interact with external search tools. While these works successfully optimize the LLM’s interaction with external factual knowledge, they do not address the broader challenge of an agent’s self-improvement through its own internal experience.
3 Method
<details>
<summary>x2.png Details</summary>
### Visual Description
## Diagram: EvolveR System Architecture
### Overview
The diagram illustrates a two-phase system (Online and Offline) for knowledge evolution and principle management. It features robotic agents, human interactions, and knowledge base (KB) operations, with cyclical processes for updating principles and trajectories.
### Components/Axes
#### Online Phase (Parameter Update)
- **Core Loop**:
- **Observe**: Robot with question mark → "Query"
- **Think**: Person with lightbulb → "Analyze... Search Query"
- **Search ExpBase**: Robot with magnifying glass → "Principle"
- **Search KB**: Robot with document → "Doc"
- **Work**: Person with laptop → "Work"
- **Organize**: Color-coded blocks → "Organize"
- **Consolidate**: Person sleeping → "Consolidate"
- **Generate Traj**: Pencil, checkmark, warning sign → "Generate Traj"
- **Self-Distill**: Robot in bed → "Self-Distill"
- **Get Principle**: Robot with lightbulb → "Get Principle"
- **Update ExpBase**: Gear icon → "Update ExpBase"
- **Key Elements**:
- **ExpBase**: Knowledge base with principles (Principle 1, 2, ..., N) and trajectories (Traj1, Traj2).
- **Principle Operations**: Distill, Deduplicate, Update, Filter (low-score).
- **LLM Semantic Match**: Threshold-based similarity checks.
#### Offline Phase (Parameter Frozen)
- **Update ExpBase**:
- **Trajectory**: Summarize → New Principle → Retrieve Top k Principles
- **Similarity Threshold**: Filters via LLM Semantic Match.
- **Principle Operation**:
- **Distill**: Extract core ideas.
- **Deduplicate**: Remove redundancies.
- **Update**: Revise principles.
- **Filter**: Remove low-score principles.
### Detailed Analysis
1. **Online Phase Flow**:
- Starts with observation (robot querying) → thinking (human analysis) → searching external/existing knowledge bases → work → organization → consolidation → trajectory generation → self-distillation → principle retrieval → knowledge base update.
- Arrows form a closed loop, emphasizing continuous iteration.
2. **Offline Phase Flow**:
- Focuses on refining trajectories and principles without parameter updates.
- Trajectories are summarized, matched against existing principles, and updated if no match.
- Principle operations ensure quality (distill, deduplicate) and relevance (filter low-scores).
3. **ExpBase Structure**:
- Contains principles (e.g., Principle 1: "For comparison questions...") with scores (0.7, 0.6, 0.9).
- Trajectories (Traj1, Traj2) link principles to actions (e.g., "Principles → Thoughts → Tool use").
### Key Observations
- **Cyclical Nature**: The Online Phase emphasizes real-time adaptation, while the Offline Phase focuses on static refinement.
- **Knowledge Integration**: ExpBase acts as a central hub, merging new principles and trajectories from both phases.
- **Human-Robot Collaboration**: Humans drive analysis and work, while robots handle querying, searching, and updates.
### Interpretation
The EvolveR system combines human intuition (e.g., "Think" phase) with automated knowledge management. The Online Phase enables dynamic learning (parameter updates), while the Offline Phase ensures stability (parameter frozen) through rigorous principle curation. The ExpBase’s role as a mediator between phases highlights its importance in maintaining coherence. Trajectories serve as actionable pathways, validated by LLM semantic matching to avoid redundancy. This architecture suggests a hybrid AI-human system for adaptive knowledge evolution, balancing exploration (Online) and exploitation (Offline).
</details>
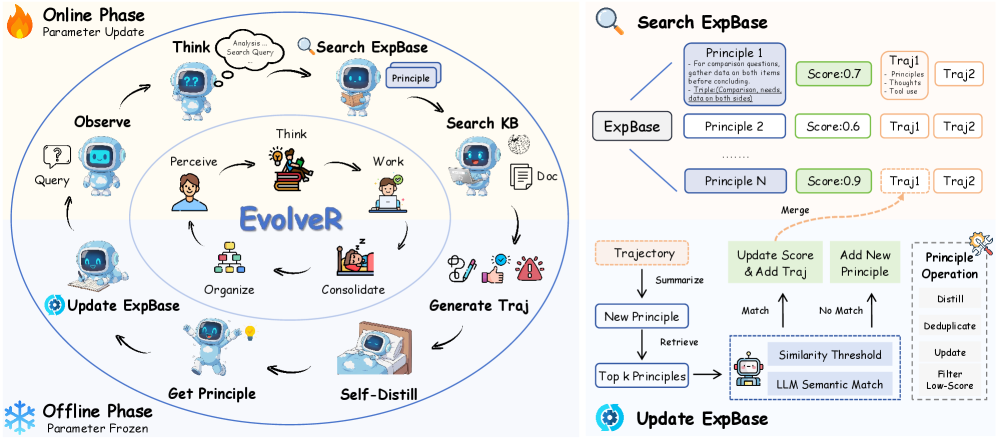
Figure 2: Overview of the EvolveR framework’s experience lifecycle. Left: The main loop alternates between an Online Phase, where the agent interacts with the environment and its policy parameters are updated via RL, and an Offline Phase, where the agent’s parameters are frozen and it performs self-distillation and maintains its Experience Base ( $\mathcal{E}$ ). Top Right: A detailed view of the Search ExpBase action, where the agent retrieves scored principles along with their associated trajectories. Bottom Right: The Update ExpBase process, which involves summarizing trajectories and applying a suite of curation operations (distill, deduplicate, update, and filter).
In this section, we present EvolveR, a novel framework designed to enable agent self-evolution through a complete, closed-loop experience lifecycle. Inspired by the human cycle of work and reflection, our approach is structured around three core, interconnected components, as depicted in Figure 2. First, in the Offline Experience Self-Distillation phase, the agent’s policy parameters are frozen, and it systematically distills raw trajectories into a curated base of strategic principles. Second, during the Online Interaction phase, the agent applies this distilled wisdom to guide its deliberative reasoning and action, generating new, high-quality interaction data. Finally, the entire cycle is driven by a Policy Evolution mechanism, where the trajectories collected online are used to update the agent’s policy parameters via reinforcement learning, thus closing the loop. This iterative process allows the agent to continuously transform its interactions into evolving expertise.
3.1 Preliminaries: Formalizing Agent Interaction
At each state $t$ , the agent, situated in an unknown state $s_{t}$ , selects an action $a_{t}∈\mathcal{A}$ based on its policy. Our agent’s action space $\mathcal{A}$ is designed for complex, knowledge-intensive tasks and comprises three key operations:
- <search_experience>: Agent queries its internal experience base $\mathcal{E}$ to retrieve relevant principles distilled from past trajectories. Environment returns retrieved principles as an observation.
- <search_knowledge>: Agent queries an external knowledge base (e.g., a search engine) to acquire factual information. Environment returns retrieved information as an observation.
- <answer>: Agent outputs its final answer to the problem and concludes the interaction.
3.2 The EvolveR Lifecycle: From Interactions to Principles
3.2.1 Offline Experience Self-Distillation
The core of EvolveR is a self-perpetuating lifecycle designed to transform raw interaction data into a strategic principle. This process is divided into two distinct, alternating phases: an offline self-distillation phase for distilling the principle, and an online interaction phase for applying the principle and gathering new interaction data.
Principle from Self-Distillation.
The process begins with self-distillation. We leverage the agent’s own policy model $\pi_{\theta}$ to analyze its past interaction trajectories. By adopting the persona of an expert through carefully designed prompts, the model reviews each trajectory and, based on its outcome, distills the core strategic insight into a concise natural language statement. This results in either a guiding principle from a success or a cautionary principle from a failure.
Inspired by structured memory frameworks such as Mem0 [24] and G-Memory [25], each principle consists of two components: a natural language description paired with several structured knowledge triples, as illustrated in Figure 2. This self-distillation approach enables the agent to autonomously generate reusable knowledge.
Deduplication and Integration.
To maintain a high-quality experience base ( $\mathcal{E}$ ), we do not add every distilled principle. Instead, each new principle undergoes a rigorous integration process. First, to handle redundancies arising from similar trajectories (e.g., from GRPO sampling), we perform a deduplication step. We use the agent model $\pi_{\theta}$ to pair-wise check for semantic equivalence among newly generated principles that originate from the same problem, keeping only one representative from each semantically equivalent cluster.
Second, for each unique principle, we apply a two-stage matching procedure: we first retrieve the most similar existing principles from $\mathcal{E}$ via embedding similarity, then prompt the agent model to provide a binary semantic equivalence judgment. If a principle is novel, it is added as a new entry in $\mathcal{E}$ ; otherwise, the new trajectory is merged under the existing principle, enriching it without introducing redundancy.
Let $p_{\text{cand}}$ be a new candidate principle distilled from trajectory $\tau_{\text{src}}$ . We update the experience base $\mathcal{E}$ as follows:
$$
\mathcal{E}\leftarrow\begin{cases}\mathcal{E}\cup\{p_{\text{cand}}\}&\text{if }\max_{p\in\mathcal{E}}\text{sim}(p_{\text{cand}},p)<\theta_{\text{sim}}\\
\text{Merge}(\mathcal{E},p^{*},\tau_{\text{src}})&\text{otherwise}\end{cases} \tag{1}
$$
where $\text{sim}(·,·)$ is the cosine similarity between principle, $\theta_{\text{sim}}$ is a similarity threshold, and $p^{*}=\text{argmax}_{p∈\mathcal{E}}\text{sim}(p_{\text{cand}},p)$ . The Merge operation links $\tau_{\text{src}}$ to its best match $p^{*}$ .
This two-level check ensures that $\mathcal{E}$ grows with novel insights while strengthening existing ones with new evidence.
Quality Control via Dynamic Scoring.
As the experience base accumulates principles over time, it becomes essential to evaluate their practical utility and prioritize the most effective strategies. To this end, each principle tracks its usage and success counts, enabling the computation of an empirical score that reflects historical performance. We quantify the empirical utility of each principle using a metric score, which is updated as:
$$
s(p)=\frac{c_{\text{succ}}(p)+1}{c_{\text{use}}(p)+2} \tag{2}
$$
where $c_{\text{succ}}(p)$ and $c_{\text{use}}(p)$ are the success and usage counts for a given principle $p$ , $s(p)$ is the metric score.
This score provides a reliable measure of a principle’s historical effectiveness. To ensure the long-term health of the experience base, we periodically prune principles whose scores fall below a threshold $\theta_{\text{prune}}$ . This systematic process of distillation, integration, and quality control ensures that the agent’s wisdom remains a compact and high-quality repository of its most effective strategies.
3.2.2 Online Interaction
The online phase serves as the interactive testbed where the agent applies its distilled principles to solve problems. The agent operates within a deliberative reasoning loop (e.g., Think-Act-Observe), which enables it to engage in multi-turn, autonomous tool use. However, the core novelty of EvolveR’s online phase is not the loop itself, but how the principles retrieved from the experience base ( $\mathcal{E}$ ) fundamentally alter the agent’s behavior within it.
Experience as a Strategic Principle.
Unlike standard agents that must discover reasoning patterns from scratch through trial and error, an EvolveR agent is guided by a strategic wisdom provided by its own past experiences. At any point in its reasoning loop, the agent can issue a <search_experience> action. The retrieved principles $\mathcal{P}_{k}$ do not merely provide factual information; they offer heuristic guidance that shapes the agent’s subsequent reasoning. For instance, retrieving a principle such as “For comparison questions, gather data on both items before concluding,” can directly influence the agent’s internal monologue (<think>) and steer its subsequent potential <search_knowledge> actions. This makes the agent’s exploration more efficient and less prone to common pitfalls, as it learns to follow the wisdom in its own distilled principles.
Generating High-Quality Trajectories for Future Distillation.
The ultimate purpose of the online phase, within the EvolveR paradigm, extends beyond solving the immediate task. It is responsible for generating high-quality data for the next cycle of offline reflection. Because the agent’s actions are guided by proven principles, the resulting trajectories, $\tau_{\text{new}}$ , are not random walks but are instead rich recordings of structured, experience-guided problem-solving. These trajectories capture the interplay between distilled principles, internal reasoning, and external tool use (e.g., <search_knowledge>), and serve as valuable input for the offline phase, enabling EvolveR to refine existing principles and discover more effective strategies in a virtuous cycle.
3.3 Policy Evolution: Closing the Loop with Reinforcement Learning
To enable the agent to learn from its actions and evolve its policy $\pi_{\theta}$ , we employ a reinforcement learning framework. The learning process is guided by a composite reward function and a policy optimization algorithm that leverages the trajectories collected during the online phase.
Reward Function.
We design a composite reward function $R(\tau)$ for a given trajectory $\tau$ that balances task success with procedural correctness. It is a weighted sum of an outcome reward and a format reward: $R(\tau)=w_{o}R_{\text{outcome}}(\tau)+w_{f}R_{\text{format}}(\tau)$ .
<details>
<summary>img/grpo.png Details</summary>
### Visual Description
## Flowchart: Reinforcement Learning System Architecture
### Overview
The diagram illustrates a reinforcement learning (RL) system architecture with interconnected components. It shows the flow of data from input questions to policy model outputs, incorporating feedback loops and reward-based optimization. Key elements include policy modeling, experience/knowledge bases, ground truth (GT) answers, reference modeling, and group computation.
### Components/Axes
- **Input**: "Questions" (blue box, left side)
- **Core Components**:
- **Policy Model** (green box, central)
- **Experience Base** (white box, connected to Policy Model)
- **Knowledge Base** (white box, connected to Policy Model)
- **GT Answers** (blue box, top-center)
- **Reference Model** (brown box, central-right)
- **Reward Model** (gray dashed box, right-center)
- **Group Computation** (labeled, right side)
- **Output**: "A₁" to "A_G" (action outputs, rightmost column)
- **Legend**: "KL" (top-right, likely denotes key labels or components)
### Detailed Analysis
1. **Flow Path**:
- **Left Path**:
- Questions → Policy Model → Experience Base ↔ Knowledge Base
- Experience Base outputs (O₁ to O_G) feed back into Policy Model
- **Right Path**:
- GT Answers → Reference Model → Reward Model (Outcome Reward + Format Reward)
- Reward Model outputs (R₁ to R_G) → Group Computation → A₁ to A_G
- A₁ to A_G loop back to Reference Model
2. **Color Coding**:
- Policy Model: Green
- GT Answers: Blue
- Reference Model: Brown
- Reward Model: Gray (dashed)
- Arrows: Black
3. **Structural Notes**:
- Dashed lines indicate optional or evaluative components (Reward Model)
- Double-sided arrows (↔) suggest bidirectional data exchange (Experience ↔ Knowledge Base)
- Group Computation acts as an aggregator for final action outputs
### Key Observations
- **Feedback Loops**:
- Experience/Knowledge Base ↔ Policy Model
- Actions (A₁-A_G) → Reference Model (creates closed-loop optimization)
- **Reward Structure**:
- Two reward types (Outcome + Format) suggest multi-criteria optimization
- Reward Model outputs (R₁-R_G) are grouped before final action computation
- **Modular Design**:
- Clear separation between policy generation (left) and evaluation/optimization (right)
### Interpretation
This architecture represents a hybrid RL system combining:
1. **Experience-driven learning** (Experience Base ↔ Policy Model)
2. **Knowledge integration** (Knowledge Base as external memory)
3. **Ground truth supervision** (GT Answers → Reference Model)
4. **Multi-objective reward shaping** (Outcome + Format rewards)
5. **Ensemble action selection** (Group Computation aggregating R₁-R_G)
The system likely implements Proximal Policy Optimization (PPO) or similar RL framework with:
- Experience replay (Experience Base)
- Knowledge distillation (Knowledge Base)
- Multi-task reward shaping
- Group-level action selection for robustness
Notable design choices:
- The Reference Model acts as a "teacher" providing GT answers and reward signals
- The Reward Model's dashed outline suggests it may be a separate training component
- Group Computation implies ensemble methods for action selection
</details>
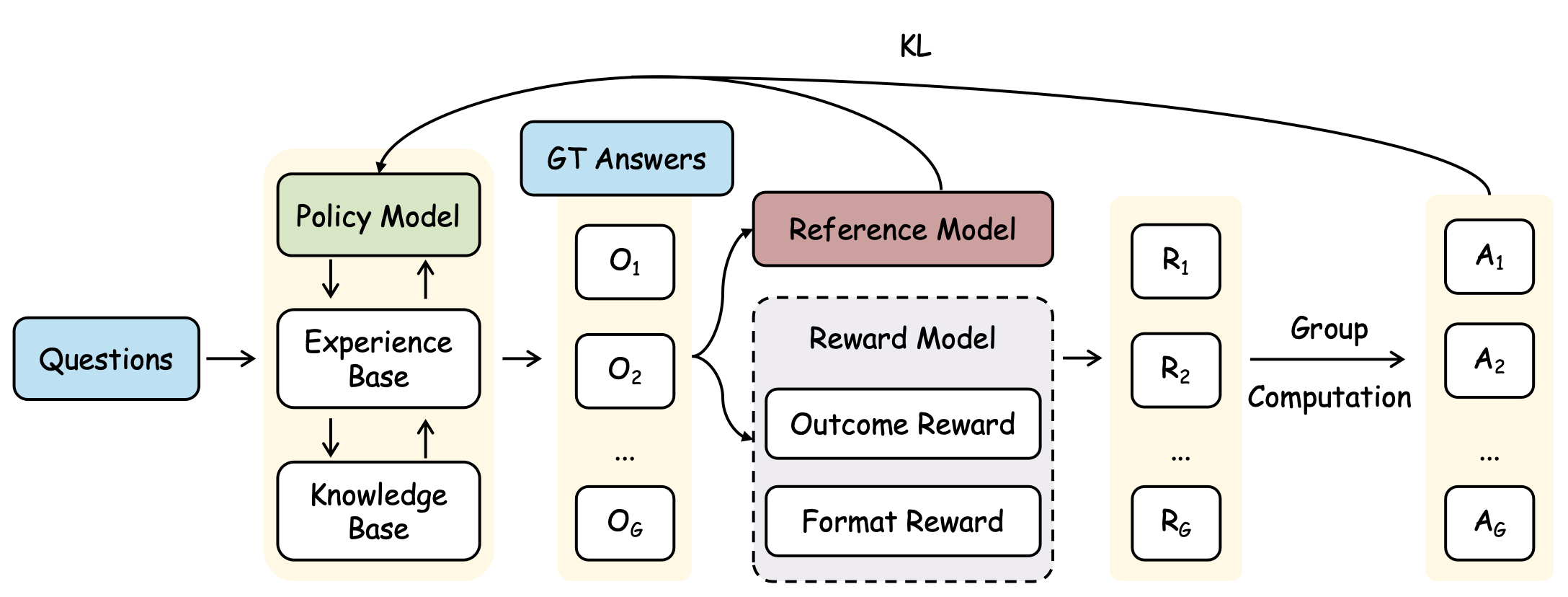
Figure 3: Policy model update optimization algorithm of EvolveR.
- Outcome Reward $R_{\text{outcome}}$ , is a sparse, binary reward based on the final answer’s correctness. Following prior work, it is determined by an exact match with the ground truth:
$$
R_{\text{outcome}}(\tau)=\text{EM}(a_{\text{pred}},a_{\text{gold}}) \tag{3}
$$
where $a_{\text{pred}}$ is the final answer extracted from the trajectory $\tau$ and $a_{\text{gold}}$ is the ground truth answer.
- Format Reward $R_{\text{format}}$ , is a dense shaping reward that evaluates the quality of the reasoning process. Let $N_{\text{think}}(\tau)$ , $N_{\text{exp}}(\tau)$ and $N_{\text{know}}(\tau)$ denote the counts of valid <think>, <search_experience> and <search_knowledge> actions within $\tau$ . $R_{\text{format}}$ is composed of a think score $R_{\text{think}}$ , rewarding a balanced number of reasoning steps, and a search score $R_{\text{search}}$ promoting search experience and knowledge. The final format reward is calculated as:
$$
R_{\text{format}}(\tau)=\mathbb{I}(\tau_{\text{complete}})\cdot\frac{R_{\text{think}}(\tau)+R_{\text{search}}(\tau)}{2} \tag{4}
$$
where $\mathbb{I}(\tau_{\text{complete}})$ is an indicator function that is $1$ only if the trajectory contains at least one of each required action type (<think>, any search, and <answer>), and $0$ otherwise. This ensures that only structurally complete trajectories receive a format reward.
Policy Optimization.
The policy $\pi_{\theta}$ is updated using the collected trajectories. We utilize Group Relative Policy Optimization (GRPO) [26], which balances the optimization stability and efficiency by using the average reward of multiple sampled trajectories as a baseline, thus avoiding the need for a learned value function. Specifically, for each input, we sample a group of $G$ trajectories. The policy is then optimized by maximizing the following objective function:
$$
\mathcal{J}_{\text{GRPO}}(\theta)=\mathbb{E}_{\tau\in\mathcal{D}}\left[\sum_{t=1}^{|\tau|}\min\left(\rho_{t}(\theta)\hat{A}_{t},\text{clip}(\rho_{t}(\theta),1-\epsilon,1+\epsilon)\hat{A}_{t}\right)-\beta D_{\text{KL}}[\pi_{\theta}||\pi_{\text{ref}}]\right] \tag{5}
$$
where $\rho_{t}(\theta)=\frac{\pi_{\theta}(a_{t}|h_{t})}{\pi_{\text{old}}(a_{t}|h_{t})}$ is the importance sampling ratio, $\hat{A}_{t}$ is the advantage estimate, and the final term is a KL-divergence penalty to constrain policy updates.
Crucially, this optimization process is deeply integrated with our experience lifecycle. As the agent’s actions during the online phase are conditioned on the principles $\mathcal{P}_{k}$ retrieved from its experience base, the trajectories collected in $\mathcal{D}$ are inherently experience-guided. Consequently, the GRPO update does not merely learn a generic reasoning policy. Instead, it explicitly learns a policy of how to effectively utilize its own distilled wisdom to generate successful outcomes. The optimization process, therefore, reinforces the valuable connections between retrieving high-quality principles and producing high-reward trajectories, successfully closing the learning loop.
4 Experiments
4.1 Experimental Implementation Details
4.1.1 Tasks and Datasets
To comprehensively evaluate the EvolveR paradigm, we assess its performance on seven question-answering benchmarks, encompassing both in-domain and out-of-domain datasets. Following prior work [21, 22], the in-domain datasets, whose training splits are used to build the experience base, include Natural Questions (NQ) [27] and the multi-hop benchmark HotpotQA [28]. The out-of-domain datasets, used exclusively for evaluating generalization, encompass the general QA benchmarks TriviaQA [29] and PopQA [30], as well as the more complex multi-hop challenges 2WikiMultiHopQA [31], Musique [32], and Bamboogle [33].
4.1.2 Baseline Methods
Following prior works, we compare against a comprehensive suite of baselines built upon the Qwen2.5 foundational models. The baselines represent three primary paradigms. First, prompting-based methods, which require no parameter updates, include Direct Inference, Chain-of-Thought (CoT) [18], Retrieval-Augmented Generation (RAG) [34], and advanced variants like IRCoT [35] and Search-o1 [36]. Second, Supervised Fine-Tuning (SFT) methods represent approaches that learn from static expert data, including standard SFT [37] and Rejection Sampling [38]. Finally, the most direct competitors are RL methods, against which we benchmark extensively. This category is primarily composed of Search-R1 [21], DeepSeek-R1 [39], which are also trained with trajectory-level feedback. Specifically, DeepSeek-R1 performs reasoning and answer steps without a search engine, whereas Search-R1 incorporates an external local or web search engine. Together, these baselines provide a challenging evaluation landscape for our proposed paradigm.
4.1.3 Evaluation Metrics
To ensure a direct and fair comparison with prior work in our main results, our primary evaluation metric is Exact Match (EM), a strict measure that requires the predicted answer to exactly match the ground truth after standard normalization. We also report the F $1$ Score in the analysis of model scales’ generalizability, which provides a more comprehensive and robust measure of performance, particularly since ground truths may contain multiple valid answers or aliases.
4.1.4 Implementation Details
Our experiments are conducted on the Qwen2.5 model family. Inspired by DeepSeek-R1 [39], we introduce a cold-start stage to stabilize early RL training by first fine-tuning the base model on a small, curated dataset of CoT interaction trajectories. Following the setup of Search-R1, we construct this dataset from approximately 700 samples from the NQ and HotpotQA training sets. We utilize the LLama_Factory [40] to fine-tune the model with LoRA. For the agent evolution phase, we employ GRPO for optimization. At each RL step, we sample a batch of 128 prompts, generating $G=8$ trajectories for each. The agent is then updated, again using Adam, but with a reduced learning rate of $1× 10^{-6}$ , a warm-up step of 20 and a mini-batch size of 128. All training is conducted on 8 A100 GPUs, leveraging the Verl framework https://github.com/volcengine/verl for efficient implementation. We will show more details in Appendix 4.1.
4.2 Main Results
The main results of our evaluation are presented in Table 1. Our analysis focuses on the comprehensive evaluation conducted on the Qwen2.5-3B model family (we will show more results of different model scales in the 5.1). EvolveR achieves the highest average score (0.382) in the 3B scale, outperforming all baselines, including strong RL agents like Searcher-R1. This robust overall performance is not driven by a narrow specialty, but by consistent, top-tier results across a wide spectrum of tasks; it secures the best scores on diverse benchmarks, including the in-domain NQ, the out-of-domain PopQA, and the adversarial Bamboogle dataset, while remaining highly competitive on all others. This consistent, high-level performance across diverse benchmarks validates that by systematically distilling, managing, and utilizing, agents can develop more generalizable and powerful problem-solving strategies.
Table 1: Main results on QA benchmarks. The best performance in each column is set in bold. Our proposed model, EvolveR, is highlighted in gray.
| Direct Inference CoT IRCoT | 0.106 0.023 0.111 | 0.149 0.021 0.164 | 0.288 0.032 0.312 | 0.108 0.005 0.200 | 0.244 0.021 0.171 | 0.020 0.002 0.067 | 0.024 0.000 0.240 | 0.134 0.015 0.181 |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Search-o1 | 0.238 | 0.221 | 0.472 | 0.262 | 0.218 | 0.054 | 0.320 | 0.255 |
| RAG | 0.348 | 0.255 | 0.544 | 0.387 | 0.226 | 0.047 | 0.080 | 0.270 |
| SFT | 0.249 | 0.186 | 0.292 | 0.104 | 0.248 | 0.044 | 0.112 | 0.176 |
| R1-base | 0.226 | 0.201 | 0.455 | 0.173 | 0.268 | 0.055 | 0.224 | 0.229 |
| R1-instruct | 0.210 | 0.208 | 0.449 | 0.171 | 0.275 | 0.060 | 0.192 | 0.224 |
| Rejection Sampling | 0.294 | 0.240 | 0.488 | 0.332 | 0.233 | 0.059 | 0.210 | 0.265 |
| Search-R1-base | 0.406 | 0.284 | 0.587 | 0.435 | 0.273 | 0.049 | 0.088 | 0.303 |
| Search-R1-instruct | 0.341 | 0.324 | 0.545 | 0.378 | 0.319 | 0.103 | 0.264 | 0.325 |
| EvolveR (ours) | 0.434 | 0.373 | 0.584 | 0.434 | 0.381 | 0.137 | 0.328 | 0.382 |
5 Further Analysis
5.1 Analysis of Model Scales Generalizability
<details>
<summary>img/evolver_scaling_results.png Details</summary>
### Visual Description
## Bar Chart: Model Performance Comparison Across Datasets
### Overview
The chart compares Entity Matching (EM) and F1 scores for three model sizes (0.5B, 1.5B, 3B parameters) across seven datasets (NQ, HotpotQA, TriviaQA, PopQA, 2wiki, Musique, Bamboogle). EM scores are represented by bars, while F1 scores are shown as dashed lines. The legend uses color coding to distinguish model sizes and metrics.
### Components/Axes
- **X-axis**: Datasets (NQ, HotpotQA, TriviaQA, PopQA, 2wiki, Musique, Bamboogle)
- **Y-axis (left)**: EM Score (0.0–0.8)
- **Y-axis (right)**: F1 Score (0.0–0.8)
- **Legend**:
- EM (0.5B): Purple bars
- EM (1.5B): Blue bars
- EM (3B): Dark blue bars
- F1 (0.5B): Yellow dashed line
- F1 (1.5B): Orange dashed line
- F1 (3B): Red dashed line
### Detailed Analysis
#### EM Scores (Bars)
1. **NQ**:
- 0.5B: ~0.2
- 1.5B: ~0.35
- 3B: ~0.43
2. **HotpotQA**:
- 0.5B: ~0.12
- 1.5B: ~0.25
- 3B: ~0.37
3. **TriviaQA**:
- 0.5B: ~0.23
- 1.5B: ~0.51
- 3B: ~0.59
4. **PopQA**:
- 0.5B: ~0.26
- 1.5B: ~0.39
- 3B: ~0.43
5. **2wiki**:
- 0.5B: ~0.16
- 1.5B: ~0.19
- 3B: ~0.38
6. **Musique**:
- 0.5B: ~0.03
- 1.5B: ~0.06
- 3B: ~0.14
7. **Bamboogle**:
- 0.5B: ~0.06
- 1.5B: ~0.12
- 3B: ~0.33
#### F1 Scores (Dashed Lines)
1. **NQ**:
- 0.5B: ~0.25
- 1.5B: ~0.44
- 3B: ~0.52
2. **HotpotQA**:
- 0.5B: ~0.16
- 1.5B: ~0.35
- 3B: ~0.48
3. **TriviaQA**:
- 0.5B: ~0.29
- 1.5B: ~0.59
- 3B: ~0.66
4. **PopQA**:
- 0.5B: ~0.30
- 1.5B: ~0.43
- 3B: ~0.48
5. **2wiki**:
- 0.5B: ~0.22
- 1.5B: ~0.25
- 3B: ~0.44
6. **Musique**:
- 0.5B: ~0.06
- 1.5B: ~0.12
- 3B: ~0.21
7. **Bamboogle**:
- 0.5B: ~0.11
- 1.5B: ~0.21
- 3B: ~0.43
### Key Observations
1. **EM Score Trends**:
- Larger models (3B) consistently outperform smaller models across all datasets.
- **Exceptions**: Bamboogle shows a significant drop in EM score for 3B (~0.33) compared to 1.5B (~0.12), suggesting dataset-specific challenges.
- Musique performs poorly across all model sizes, with EM scores below 0.15.
2. **F1 Score Trends**:
- F1 scores generally increase with model size, mirroring EM trends.
- **Notable**: TriviaQA and Bamboogle show the largest F1 improvements with larger models.
- F1 scores are consistently higher than EM scores for equivalent model sizes, indicating better overall performance metrics.
3. **Dataset Variability**:
- TriviaQA and Bamboogle exhibit the highest performance gains with larger models.
- Musique remains the weakest dataset, with scores below 0.25 for all metrics.
### Interpretation
The data demonstrates a clear correlation between model size and performance, with 3B models achieving the highest scores in most cases. However, Bamboogle's anomalous EM score suggests dataset-specific limitations in larger models. F1 scores consistently outperform EM scores, highlighting their effectiveness in evaluating model performance. The Musique dataset's poor performance across all metrics indicates potential challenges in its composition or evaluation criteria. These trends underscore the importance of model scaling for complex tasks but also emphasize the need for dataset-specific optimization.
</details>
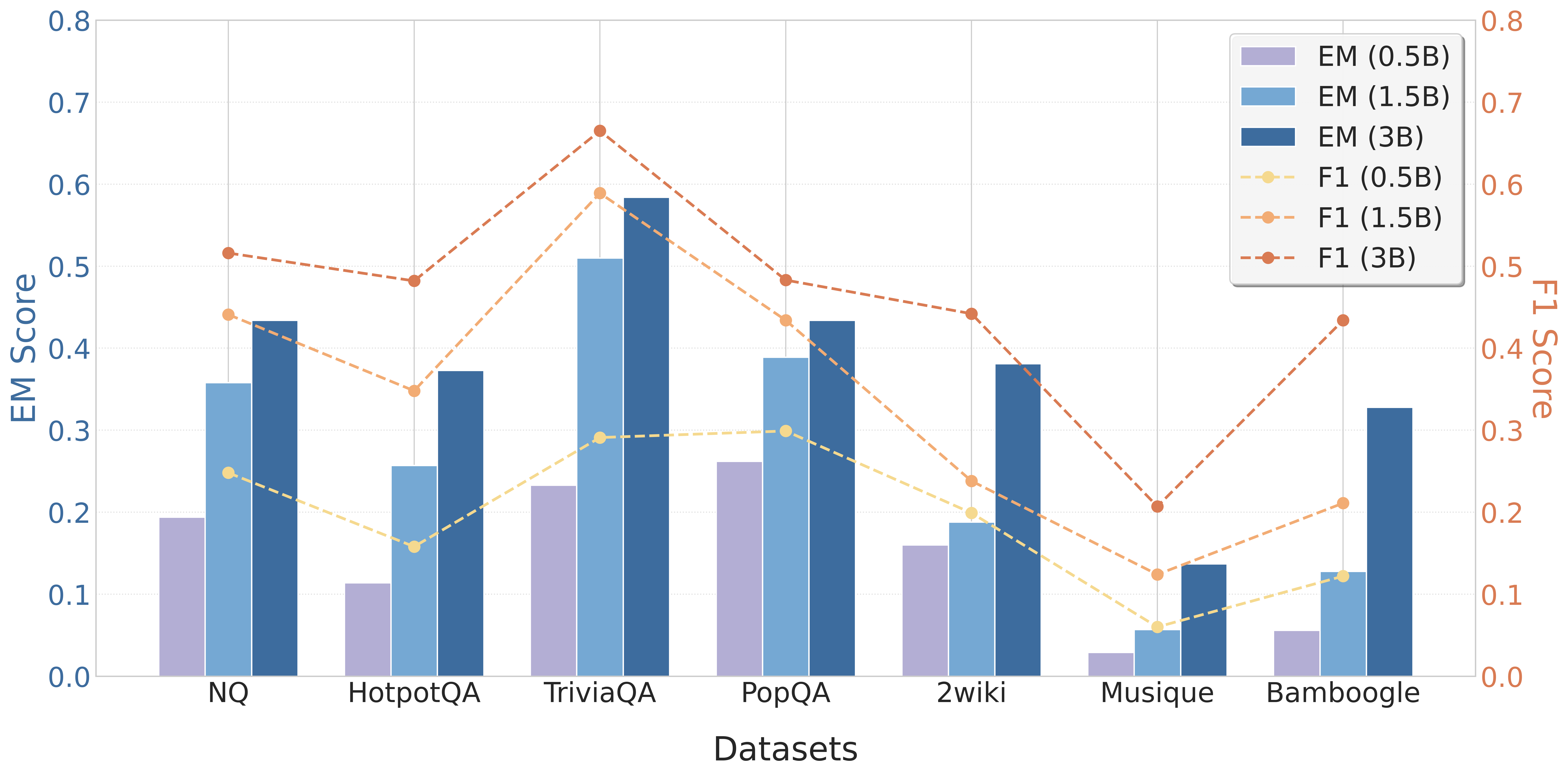
Figure 4: Performance of EvolveR across various model scales.
To validate that our EvolveR framework is a generalizable paradigm rather than a method tailored to a specific model size, we evaluated its performance across a spectrum of open-source model scales. As presented in Figure 4, we applied EvolveR to Qwen2.5 models of 0.5B, 1.5B, and 3B parameters. The results reveal a clear and consistent positive trend: as the parameter count of the base model increases, the performance of the EvolveR agent improves significantly on every benchmark. The average performance rises monotonically from 0.150 on the 0.5B model to 0.270 on the 1.5B model, and further to 0.382 on the 3B model. This scaling behavior demonstrates that our experience-driven lifecycle effectively harnesses the superior reasoning and instruction-following capabilities inherent in larger foundational models. It confirms that EvolveR acts as a synergistic layer on top of the base model, and suggests that its performance will continue to improve with future advancements in the open-source LLM landscape.
5.2 Ablation Studies: Dissecting the EvolveR Framework
5.2.1 Validating the Self-Distillation Mechanism
A central claim of our work is that an agent can learn effectively through self-distillation. To rigorously investigate this, we compare our standard EvolveR (self-distill) against a strong alternative, EvolveR(teacher-distill), which uses the powerful GPT-4o-mini as an external model for experience distillation.
The results, presented in Table 2, reveal a nuanced, scale-dependent relationship. For smaller models like the 0.5B variant, the stronger external teacher provides a clear benefit, as the base model’s own distillation capabilities are limited. However, as the model scales to 3B, a reversal occurs: our EvolveR (self-distill) (0.382 avg.) outperforms the teacher-guided variant (0.370 avg.). This is a critical finding, suggesting that as an agent’s own reasoning becomes more sophisticated, principles distilled from its own internal policy are ultimately more effective due to better ”cognitive alignment”. This validates self-distillation as a core, scaling strength of the EvolveR paradigm.
Table 2: Validating the self-distillation mechanism. We compare our EvolveR, which uses its own model for distillation, against a variant that uses a larger, external model (GPT-4o-mini).
| Model Variant | In domain | Out of domain | Avg. | | | | | |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
| NQ $\uparrow$ | HotpotQA $\uparrow$ | TriviaQA $\uparrow$ | PopQA $\uparrow$ | 2wiki $\uparrow$ | Musique $\uparrow$ | Bamboogle $\uparrow$ | | |
| Qwen2.5-0.5B | | | | | | | | |
| EvolveR (self-distill) | 0.194 $\downarrow$ | 0.114 $\uparrow$ | 0.233 $\uparrow$ | 0.262 $\uparrow$ | 0.160 $\downarrow$ | 0.029 $\downarrow$ | 0.056 $\downarrow$ | 0.150 $\downarrow$ |
| EvolveR (teacher-distill) | 0.281 $\uparrow$ | 0.193 $\uparrow$ | 0.402 $\uparrow$ | 0.363 $\uparrow$ | 0.202 $\uparrow$ | 0.033 $\uparrow$ | 0.064 $\uparrow$ | 0.220 $\uparrow$ |
| Qwen2.5-1.5B | | | | | | | | |
| EvolveR (self-distill) | 0.358 $\uparrow$ | 0.257 $\uparrow$ | 0.510 $\uparrow$ | 0.389 $\uparrow$ | 0.188 $\uparrow$ | 0.057 $\uparrow$ | 0.128 $\uparrow$ | 0.270 $\uparrow$ |
| EvolveR (teacher-distill) | 0.352 $\downarrow$ | 0.259 $\uparrow$ | 0.503 $\downarrow$ | 0.395 $\uparrow$ | 0.207 $\uparrow$ | 0.072 $\uparrow$ | 0.240 $\uparrow$ | 0.290 $\uparrow$ |
| Qwen2.5-3B | | | | | | | | |
| EvolveR (self-distill) | 0.434 $\uparrow$ | 0.373 $\uparrow$ | 0.584 $\uparrow$ | 0.434 $\uparrow$ | 0.381 $\uparrow$ | 0.137 $\uparrow$ | 0.328 $\uparrow$ | 0.382 $\uparrow$ |
| EvolveR (teacher-distill) | 0.421 $\downarrow$ | 0.372 $\downarrow$ | 0.583 $\downarrow$ | 0.359 $\downarrow$ | 0.437 $\uparrow$ | 0.127 $\downarrow$ | 0.288 $\downarrow$ | 0.370 $\downarrow$ |
5.2.2 The Role of Experience Retrieval
To quantify the direct benefit of providing the agent with access to its distilled principles at inference time. To achieve this, we compare our full EvolveR model against an ablated variant, EvolveR w/o exp-retrieve. It is critical to note that both models undergo the identical experience-driven RL training process. The sole difference is that the w/o exp-retrieve variant is denied access to the experience base during evaluation.
The results in Table 3 show a stark performance degradation across all model scales when experience retrieval is disabled. For the 3B model, for instance, the average performance drops significantly from 0.382 to 0.340. This substantial gap underscores a key finding: an agent trained with our EvolveR framework, while powerful on its own, achieves its full potential only when it can access and condition on the relevant principles from its past. This demonstrates that experience retrieval is a critical and indispensable component of the EvolveR paradigm for optimal performance.
Table 3: Investigating the role of experience retrieval at inference time. The w/o exp-retrieve variant uses the same model but is not allowed to access the experience base during evaluation.
| Model Variant | In domain | Out of domain | Avg. | | | | | |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
| NQ $\uparrow$ | HotpotQA $\uparrow$ | TriviaQA $\uparrow$ | PopQA $\uparrow$ | 2wiki $\uparrow$ | Musique $\uparrow$ | Bamboogle $\uparrow$ | | |
| Qwen2.5-0.5B | | | | | | | | |
| EvolveR | 0.194 $\downarrow$ | 0.114 $\downarrow$ | 0.233 $\downarrow$ | 0.262 $\downarrow$ | 0.160 $\downarrow$ | 0.029 $\downarrow$ | 0.056 $\downarrow$ | 0.150 $\downarrow$ |
| EvolveR w/o exp-retrieve | 0.085 $\downarrow$ | 0.065 $\downarrow$ | 0.137 $\downarrow$ | 0.150 $\downarrow$ | 0.082 $\downarrow$ | 0.013 $\downarrow$ | 0.016 $\downarrow$ | 0.078 $\downarrow$ |
| Qwen2.5-1.5B | | | | | | | | |
| EvolveR | 0.358 $\downarrow$ | 0.257 $\downarrow$ | 0.510 $\downarrow$ | 0.389 $\downarrow$ | 0.188 $\downarrow$ | 0.057 $\downarrow$ | 0.128 $\downarrow$ | 0.270 $\downarrow$ |
| EvolveR w/o exp-retrieve | 0.136 $\downarrow$ | 0.112 $\downarrow$ | 0.218 $\downarrow$ | 0.160 $\downarrow$ | 0.136 $\downarrow$ | 0.019 $\downarrow$ | 0.080 $\downarrow$ | 0.123 $\downarrow$ |
| Qwen2.5-3B | | | | | | | | |
| EvolveR | 0.434 $\downarrow$ | 0.373 $\downarrow$ | 0.584 $\downarrow$ | 0.434 $\downarrow$ | 0.381 | 0.137 $\downarrow$ | 0.328 $\downarrow$ | 0.382 $\downarrow$ |
| EvolveR w/o exp-retrieve | 0.405 $\downarrow$ | 0.343 $\downarrow$ | 0.569 $\downarrow$ | 0.392 $\downarrow$ | 0.334 $\downarrow$ | 0.100 $\downarrow$ | 0.240 $\downarrow$ | 0.340 $\downarrow$ |
6 Conclusion
In this work, we introduced EvolveR, a novel paradigm for self-evolving LLM agents centered on a complete, closed-loop experience lifecycle. Our extensive experiments demonstrate the effectiveness of this approach, showing that EvolveR consistently and significantly outperforms a wide range of strong baseline methods on a comprehensive suite of QA benchmarks. Furthermore, our detailed ablation studies rigorously validate the core tenets of our framework, confirming the significant value of the agent’s self-distilled experiences and demonstrating the high efficacy of the self-distillation mechanism itself. While the quality of distilled principles is inherently tied to the base model’s capabilities, pointing to promising future work, EvolveR provides a concrete blueprint for agents that learn from the consequences of their own experiences, shifting the focus from merely accessing knowledge to actively building and evolving expertise.
References
- Shen et al. [2023] Yongliang Shen, Kaitao Song, Xu Tan, Dongsheng Li, Weiming Lu, and Yueting Zhuang. Hugginggpt: Solving ai tasks with chatgpt and its friends in hugging face. Advances in Neural Information Processing Systems, 36:38154–38180, 2023.
- Luo et al. [2025] Junyu Luo, Weizhi Zhang, Ye Yuan, Yusheng Zhao, Junwei Yang, Yiyang Gu, Bohan Wu, Binqi Chen, Ziyue Qiao, Qingqing Long, Rongcheng Tu, Xiao Luo, Wei Ju, Zhiping Xiao, Yifan Wang, Meng Xiao, Chenwu Liu, Jingyang Yuan, Shichang Zhang, Yiqiao Jin, Fan Zhang, Xian Wu, Hanqing Zhao, Dacheng Tao, Philip S. Yu, and Ming Zhang. Large language model agent: A survey on methodology, applications and challenges, 2025. URL https://arxiv.org/abs/2503.21460.
- ang Gao et al. [2025] Huan ang Gao, Jiayi Geng, Wenyue Hua, Mengkang Hu, Xinzhe Juan, Hongzhang Liu, Shilong Liu, Jiahao Qiu, Xuan Qi, Yiran Wu, Hongru Wang, Han Xiao, Yuhang Zhou, Shaokun Zhang, Jiayi Zhang, Jinyu Xiang, Yixiong Fang, Qiwen Zhao, Dongrui Liu, Qihan Ren, Cheng Qian, Zhenhailong Wang, Minda Hu, Huazheng Wang, Qingyun Wu, Heng Ji, and Mengdi Wang. A survey of self-evolving agents: On path to artificial super intelligence, 2025. URL https://arxiv.org/abs/2507.21046.
- Yao et al. [2023a] Shunyu Yao, Jeffrey Zhao, Dian Yu, Nan Du, Izhak Shafran, Karthik Narasimhan, and Yuan Cao. React: Synergizing reasoning and acting in language models, 2023a. URL https://arxiv.org/abs/2210.03629.
- Flesch et al. [2018] Timo Flesch, Jan Balaguer, Ronald Dekker, Hamed Nili, and Christopher Summerfield. Comparing continual task learning in minds and machines. Proceedings of the National Academy of Sciences, 115(44):E10313–E10322, 2018.
- Anderson [1993] John R Anderson. Problem solving and learning. American psychologist, 48(1):35, 1993.
- Yan et al. [2025] Sikuan Yan, Xiufeng Yang, Zuchao Huang, Ercong Nie, Zifeng Ding, Zonggen Li, Xiaowen Ma, Hinrich Schütze, Volker Tresp, and Yunpu Ma. Memory-r1: Enhancing large language model agents to manage and utilize memories via reinforcement learning. arXiv preprint arXiv:2508.19828, 2025.
- Zhao et al. [2024] Andrew Zhao, Daniel Huang, Quentin Xu, Matthieu Lin, Yong-Jin Liu, and Gao Huang. Expel: Llm agents are experiential learners, 2024. URL https://arxiv.org/abs/2308.10144.
- Zhou et al. [2025] Huichi Zhou, Yihang Chen, Siyuan Guo, Xue Yan, Kin Hei Lee, Zihan Wang, Ka Yiu Lee, Guchun Zhang, Kun Shao, Linyi Yang, and Jun Wang. Memento: Fine-tuning llm agents without fine-tuning llms, 2025. URL https://arxiv.org/abs/2508.16153.
- Chen et al. [2023] Liting Chen, Lu Wang, Hang Dong, Yali Du, Jie Yan, Fangkai Yang, Shuang Li, Pu Zhao, Si Qin, Saravan Rajmohan, et al. Introspective tips: Large language model for in-context decision making. arXiv preprint arXiv:2305.11598, 2023.
- Parisi et al. [2019] German I Parisi, Ronald Kemker, Jose L Part, Christopher Kanan, and Stefan Wermter. Continual lifelong learning with neural networks: A review. Neural networks, 113:54–71, 2019.
- Wang et al. [2024] Liyuan Wang, Xingxing Zhang, Hang Su, and Jun Zhu. A comprehensive survey of continual learning: Theory, method and application, 2024. URL https://arxiv.org/abs/2302.00487.
- Kirkpatrick et al. [2017] James Kirkpatrick, Razvan Pascanu, Neil Rabinowitz, Joel Veness, Guillaume Desjardins, Andrei A. Rusu, Kieran Milan, John Quan, Tiago Ramalho, Agnieszka Grabska-Barwinska, Demis Hassabis, Claudia Clopath, Dharshan Kumaran, and Raia Hadsell. Overcoming catastrophic forgetting in neural networks. Proceedings of the National Academy of Sciences, 114(13):3521–3526, March 2017. ISSN 1091-6490. doi: 10.1073/pnas.1611835114. URL http://dx.doi.org/10.1073/pnas.1611835114.
- Ding et al. [2024] Xuanwen Ding, Jie Zhou, Liang Dou, Qin Chen, Yuanbin Wu, Chengcai Chen, and Liang He. Boosting large language models with continual learning for aspect-based sentiment analysis, 2024. URL https://arxiv.org/abs/2405.05496.
- Huai et al. [2025a] Tianyu Huai, Jie Zhou, Yuxuan Cai, Qin Chen, Wen Wu, Xingjiao Wu, Xipeng Qiu, and Liang He. Task-core memory management and consolidation for long-term continual learning, 2025a. URL https://arxiv.org/abs/2505.09952.
- Huai et al. [2025b] Tianyu Huai, Jie Zhou, Xingjiao Wu, Qin Chen, Qingchun Bai, Ze Zhou, and Liang He. Cl-moe: Enhancing multimodal large language model with dual momentum mixture-of-experts for continual visual question answering, 2025b. URL https://arxiv.org/abs/2503.00413.
- Shinn et al. [2023] Noah Shinn, Federico Cassano, Edward Berman, Ashwin Gopinath, Karthik Narasimhan, and Shunyu Yao. Reflexion: Language agents with verbal reinforcement learning, 2023. URL https://arxiv.org/abs/2303.11366.
- Wei et al. [2022] Jason Wei, Xuezhi Wang, Dale Schuurmans, Maarten Bosma, Fei Xia, Ed Chi, Quoc V Le, Denny Zhou, et al. Chain-of-thought prompting elicits reasoning in large language models. Advances in neural information processing systems, 35:24824–24837, 2022.
- Yao et al. [2023b] Shunyu Yao, Dian Yu, Jeffrey Zhao, Izhak Shafran, Tom Griffiths, Yuan Cao, and Karthik Narasimhan. Tree of thoughts: Deliberate problem solving with large language models. Advances in neural information processing systems, 36:11809–11822, 2023b.
- Besta et al. [2024] Maciej Besta, Nils Blach, Ales Kubicek, Robert Gerstenberger, Michal Podstawski, Lukas Gianinazzi, Joanna Gajda, Tomasz Lehmann, Hubert Niewiadomski, Piotr Nyczyk, et al. Graph of thoughts: Solving elaborate problems with large language models. In Proceedings of the AAAI conference on artificial intelligence, volume 38, pages 17682–17690, 2024.
- Jin et al. [2025] Bowen Jin, Hansi Zeng, Zhenrui Yue, Jinsung Yoon, Sercan Arik, Dong Wang, Hamed Zamani, and Jiawei Han. Search-r1: Training llms to reason and leverage search engines with reinforcement learning, 2025. URL https://arxiv.org/abs/2503.09516.
- Mei et al. [2025] Jianbiao Mei, Tao Hu, Daocheng Fu, Licheng Wen, Xuemeng Yang, Rong Wu, Pinlong Cai, Xinyu Cai, Xing Gao, Yu Yang, Chengjun Xie, Botian Shi, Yong Liu, and Yu Qiao. O 2 -searcher: A searching-based agent model for open-domain open-ended question answering, 2025. URL https://arxiv.org/abs/2505.16582.
- Shi et al. [2025] Yaorui Shi, Sihang Li, Chang Wu, Zhiyuan Liu, Junfeng Fang, Hengxing Cai, An Zhang, and Xiang Wang. Search and refine during think: Autonomous retrieval-augmented reasoning of llms, 2025. URL https://arxiv.org/abs/2505.11277.
- Chhikara et al. [2025] Prateek Chhikara, Dev Khant, Saket Aryan, Taranjeet Singh, and Deshraj Yadav. Mem0: Building production-ready ai agents with scalable long-term memory, 2025. URL https://arxiv.org/abs/2504.19413.
- Zhang et al. [2025] Guibin Zhang, Muxin Fu, Guancheng Wan, Miao Yu, Kun Wang, and Shuicheng Yan. G-memory: Tracing hierarchical memory for multi-agent systems, 2025. URL https://arxiv.org/abs/2506.07398.
- Shao et al. [2024] Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, Y. K. Li, Y. Wu, and Daya Guo. Deepseekmath: Pushing the limits of mathematical reasoning in open language models, 2024. URL https://arxiv.org/abs/2402.03300.
- Kwiatkowski et al. [2019] Tom Kwiatkowski, Jennimaria Palomaki, Olivia Redfield, Michael Collins, Ankur Parikh, Chris Alberti, Danielle Epstein, Illia Polosukhin, Jacob Devlin, Kenton Lee, et al. Natural questions: a benchmark for question answering research. Transactions of the Association for Computational Linguistics, 7:453–466, 2019.
- Yang et al. [2018] Zhilin Yang, Peng Qi, Saizheng Zhang, Yoshua Bengio, William W Cohen, Ruslan Salakhutdinov, and Christopher D Manning. Hotpotqa: A dataset for diverse, explainable multi-hop question answering. arXiv preprint arXiv:1809.09600, 2018.
- Joshi et al. [2017] Mandar Joshi, Eunsol Choi, Daniel S Weld, and Luke Zettlemoyer. Triviaqa: A large scale distantly supervised challenge dataset for reading comprehension. arXiv preprint arXiv:1705.03551, 2017.
- Mallen et al. [2022] Alex Mallen, Akari Asai, Victor Zhong, Rajarshi Das, Daniel Khashabi, and Hannaneh Hajishirzi. When not to trust language models: Investigating effectiveness of parametric and non-parametric memories. arXiv preprint arXiv:2212.10511, 2022.
- Ho et al. [2020] Xanh Ho, Anh-Khoa Duong Nguyen, Saku Sugawara, and Akiko Aizawa. Constructing a multi-hop qa dataset for comprehensive evaluation of reasoning steps. arXiv preprint arXiv:2011.01060, 2020.
- Trivedi et al. [2022a] Harsh Trivedi, Niranjan Balasubramanian, Tushar Khot, and Ashish Sabharwal. Musique: Multihop questions via single-hop question composition. Transactions of the Association for Computational Linguistics, 10:539–554, 2022a.
- Press et al. [2022] Ofir Press, Muru Zhang, Sewon Min, Ludwig Schmidt, Noah A Smith, and Mike Lewis. Measuring and narrowing the compositionality gap in language models. arXiv preprint arXiv:2210.03350, 2022.
- Lewis et al. [2020] Patrick Lewis, Ethan Perez, Aleksandra Piktus, Fabio Petroni, Vladimir Karpukhin, Naman Goyal, Heinrich Küttler, Mike Lewis, Wen-tau Yih, Tim Rocktäschel, et al. Retrieval-augmented generation for knowledge-intensive nlp tasks. Advances in neural information processing systems, 33:9459–9474, 2020.
- Trivedi et al. [2022b] Harsh Trivedi, Niranjan Balasubramanian, Tushar Khot, and Ashish Sabharwal. Interleaving retrieval with chain-of-thought reasoning for knowledge-intensive multi-step questions. arXiv preprint arXiv:2212.10509, 2022b.
- Li et al. [2025] Xiaoxi Li, Guanting Dong, Jiajie Jin, Yuyao Zhang, Yujia Zhou, Yutao Zhu, Peitian Zhang, and Zhicheng Dou. Search-o1: Agentic search-enhanced large reasoning models. arXiv preprint arXiv:2501.05366, 2025.
- Chung et al. [2024] Hyung Won Chung, Le Hou, Shayne Longpre, Barret Zoph, Yi Tay, William Fedus, Yunxuan Li, Xuezhi Wang, Mostafa Dehghani, Siddhartha Brahma, et al. Scaling instruction-finetuned language models. Journal of Machine Learning Research, 25(70):1–53, 2024.
- Ahn et al. [2024] Janice Ahn, Rishu Verma, Renze Lou, Di Liu, Rui Zhang, and Wenpeng Yin. Large language models for mathematical reasoning: Progresses and challenges. arXiv preprint arXiv:2402.00157, 2024.
- Guo et al. [2025] Daya Guo, Dejian Yang, Haowei Zhang, Junxiao Song, Ruoyu Zhang, Runxin Xu, Qihao Zhu, Shirong Ma, Peiyi Wang, Xiao Bi, et al. Deepseek-r1: Incentivizing reasoning capability in llms via reinforcement learning. arXiv preprint arXiv:2501.12948, 2025.
- Zheng et al. [2024] Yaowei Zheng, Richong Zhang, Junhao Zhang, YeYanhan YeYanhan, and Zheyan Luo. LlamaFactory: Unified efficient fine-tuning of 100+ language models. In Yixin Cao, Yang Feng, and Deyi Xiong, editors, Proceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (Volume 3: System Demonstrations), pages 400–410, Bangkok, Thailand, August 2024. Association for Computational Linguistics. doi: 10.18653/v1/2024.acl-demos.38. URL https://aclanthology.org/2024.acl-demos.38.
- Qwen et al. [2025] Qwen, :, An Yang, Baosong Yang, Beichen Zhang, Binyuan Hui, Bo Zheng, Bowen Yu, Chengyuan Li, Dayiheng Liu, Fei Huang, Haoran Wei, Huan Lin, Jian Yang, Jianhong Tu, Jianwei Zhang, Jianxin Yang, Jiaxi Yang, Jingren Zhou, Junyang Lin, Kai Dang, Keming Lu, Keqin Bao, Kexin Yang, Le Yu, Mei Li, Mingfeng Xue, Pei Zhang, Qin Zhu, Rui Men, Runji Lin, Tianhao Li, Tianyi Tang, Tingyu Xia, Xingzhang Ren, Xuancheng Ren, Yang Fan, Yang Su, Yichang Zhang, Yu Wan, Yuqiong Liu, Zeyu Cui, Zhenru Zhang, and Zihan Qiu. Qwen2.5 technical report, 2025. URL https://arxiv.org/abs/2412.15115.
- Chen et al. [2024] Jianlv Chen, Shitao Xiao, Peitian Zhang, Kun Luo, Defu Lian, and Zheng Liu. Bge m3-embedding: Multi-lingual, multi-functionality, multi-granularity text embeddings through self-knowledge distillation. arXiv preprint arXiv:2402.03216, 2024.
Appendix A Appendix
A.1 Experimental Implementation Details
We provide a comprehensive list of hyperparameters and implementation details used in our experiments to ensure full reproducibility.
General Setup.
Across all experiments, we use models from the Qwen2.5 family [41] with their corresponding tokenizers. The maximum sequence length is set to 8192 tokens for all inputs, and the maximum response sequence length is set to 1024 tokens. The GPT-4o-mini model is used as the teacher model in the corresponding ablation study. We use BGE-M3 [42] as our embedding model.
Cold-start Stage.
This SFT stage is conducted for 3 epochs using the Adam optimizer, with an initial learning rate of $1× 10^{-4}$ , a warm-up ratio of 0.1, and a batch size of 16.
Online Interaction Phase.
For each <search_knowledge> action, we retrieve the top- $k_{d}=3$ documents from the external knowledge base, following the prior work [21]. Similarly, for each <search_experience> action, we retrieve the top- $k_{e}=3$ principles from the experience base $\mathcal{E}$ .
Offline Distill Phase.
The self-distill mechanism utilizes the agent’s own policy model $\pi_{\theta}$ to distill principles. The temperature is set to 1 during this phase. For the deduplication and integration process, we first use a semantic similarity pre-filter with a threshold of $\theta_{\text{sim}}=0.85$ before passing candidates to the LLM-based equivalence check. The periodic principle sweep removes any principle from $\mathcal{E}$ whose metric_score falls below the pruning threshold of $\theta_{\text{prune}}=0.3$ .
Reward Function Details.
As described in the Section 3.3, the Format Reward is an average of a think score and a search score. We detail their specific calculation here. The think score $R_{\text{think}}$ is determined by a discrete mapping based on the number of <think> actions, $N_{\text{think}}$ : it scales from 0.2 (for $N_{\text{think}}=1$ ) to a maximum of 1.0 (for $N_{\text{think}}=6$ ), and is capped at 0.5 for excessive reasoning ( $N_{\text{think}}>8$ ) to encourage conciseness. The search score $R_{\text{search}}$ is the sum of a diversity score and a quantity bonus. The diversity score is 0.5 if both <search_experience> and <search_knowledge> are used, 0.2 if only one type is used, and 0 otherwise. A quantity bonus of 0.1 is added for each additional search action beyond the first, up to a maximum bonus of 0.5 (for a total of 6 searches).
Policy Optimization.
The composite reward function is weighted with $w_{o}=1.0$ for the outcome reward and $w_{f}=0.1$ for the format reward. For the GRPO objective function (Equation 5), the clipping parameter is set to $\epsilon=0.2$ and the KL-divergence coefficient is $\beta=0.001$ . During the training procedure, we adopt vLLM to accelerate LLM rollouts. The tensor parallel size is set to 1, and the GPU memory utilization ratio is set at 0.6. For rollout sampling, we use a temperature of 1.0 and a top-p value of 0.95.
A.2 Prompt Details
A.2.1 Cold Start Prompt
The Prompt in Table 5 is used during the cold-start stage to generate the initial trajectories for SFT. This prompt guides a powerful LLM (we used GPT-4o) to act as an expert problem-solver, producing a small dataset with right format trajectories to cold start.
A.2.2 System Prompt
The Prompt in Table 4 is the system prompt used by the EvolveR agent during the online interaction phase. It defines the agent’s core identity, its available actions (<think>, <search_knowledge>, <search_experience>, <answer>), and the overall format for its reasoning process.
A.2.3 Distill Principle Prompt
The Prompt in Table 6 and Table 7 are used during the offline experience self-distillation phase to enable the agent’s self-distillation mechanism. Based on the outcome of a trajectory, one of two distinct prompts is used to guide the agent’s own model ( $\pi_{\theta}$ ) to distill a principle. The first Prompt is for successful trajectories, focusing on extracting a guiding principle. The second is for failed trajectories, aimed at formulating a cautionary principle.
A.2.4 Judge Same Principle Prompt
The Prompt in Table 8 is a crucial component of the deduplication and integration process within the offline experience self-distillation. It tasks the agent’s own model ( $\pi_{\theta}$ ) with acting as a semantic judge. Given two principles (a newly distilled candidate and a retrieved existing similar one), the model is asked to determine if they are semantically equivalent. The binary ”yes/no” output of this Prompt is used to decide whether to merge a new experience or create a new principle.
Table 4: System prompt for LLM agents
| Answer the given question. |
| --- |
| You must conduct reasoning inside <think> and </think> first every time you get new information or get new experience principles. |
| After reasoning, you can search for past experiences by <search_experience> query </search_experience> to get relevant past experience principles (may be guilding or warning principles) and it will return the top searched results between <experience> and </experience>. |
| You can use these principles which you think is helpful to help you answer the question. |
| If you find you lack some knowledge, you can call a search engine by <search_knowledge> query </search_knowledge> and it will return the top searched results between <information> and </information>. |
| You can search knowledge and experience as many times as your want. |
| If you find no further external knowledge needed, you can directly provide the answer inside <answer> and </answer>, without detailed illustrations. |
| For example, <answer> Beijing </answer> |
| User: {question} |
Table 5: Prompt for cold start.
| You are a top-notch intelligent reasoning expert, adept at restoring solution paths from given answers and documents in reverse. Your task is to simulate a full reasoning trajectory for answering the question below, based on the provided documents and answer. You must reason step-by-step as if you do not yet know the final answer, even though it is given for supervision. |
| --- |
| In <think> blocks, do not reference or confirm the final answer directly. Instead, reason like a human—understand the task, recall prior knowledge, evaluate the need for experience or external information, and gradually infer the answer. |
| The reasoning trajectory must follow the **exact format below**. If the retrieved **experience alone is sufficient to answer the question**, you may skip the <search_knowledge> and <information> steps. |
| Output Format: |
| <think> … </think> |
| <search_experience> |
| - Retrieve 2–3 relevant abstract experience principles, using structured triple format. |
| - For each principle, add a short description of its purpose. |
| </search_experience> |
| <think> Explain what you plan to do after retrieving experience. Decide whether you still need to retrieve knowledge. </think> |
| [IF experience is enough:] |
| <think> |
| - List the principles you are applying, include their triple form and description. |
| - Explain briefly how each principle contributes to your reasoning. |
| - Continue with reasoning based on these principles and conclude with your final judgment. |
| </think> |
| <answer> … </answer> |
| [ELSE:] |
| <search_knowledge> |
| - Generate one or more natural language search queries that would help retrieve the provided documents. |
| </search_knowledge> |
| <information> |
| {relevant_document} |
| </information> |
| <think> Reflect on retrieved information. </think> |
| <think> |
| - List the principles you are applying, include their triple form and description. |
| - Explain how each principle guides the reasoning process using the retrieved information. |
| - Summarize your reasoning path and justify the answer. |
| </think> |
| <Answer> … </Answer> |
| Inputs: |
| Query: {query} |
| Relevant Documents: {relevant_document} |
| Answer: {answer} |
| Please begin generating the reasoning trajectory. |
Table 6: Prompt for summarizing a successful interaction trajectory.
| You are an expert in analyzing interaction logs to distill generalizable wisdom. |
| --- |
| Analyze the following successful interaction trajectory. Your goal is to extract a ”Guiding Principle” from it. |
| A ”Guiding Principle” has two parts: |
| 1. A concise, one-sentence natural language description. This is the core advice. |
| 2. A structured representation of the key steps or logic, as a list of simple (subject, predicate, object) triplets. |
| [Trajectory Log]: {{trajectory_log}} |
| Final Outcome: SUCCESS |
| Your Task: |
| Based on the trajectory, generate the Guiding Principle. |
| First, on a new line, write {DESCRIPTION_PART_SEPARATOR}. |
| Then, write the one-sentence description of the pitfall. |
| Then, on a new line, write {STRUCTURED_PART_SEPARATOR}. |
| Finally, provide the structured triplets describing the failure pattern in a valid JSON list format. |
| [Example]: |
| {DESCRIPTION_PART_SEPARATOR} |
| When a file download fails with a 404 error, do not immediately retry the download; instead, verify the source URL’s validity first. |
| {STRUCTURED_PART_SEPARATOR} [ (file download, results_in, 404 error), (immediate_retry, is, ineffective), (correct_action, is, verify URL) ] [Output]: |
Table 7: Prompt for summarizing a failed interaction trajectory.
| You are an expert in analyzing interaction logs to find the root cause of failures. |
| --- |
| Analyze the following failed interaction trajectory. Your goal is to extract a ”Cautionary Principle” from it. |
| A ”Cautionary Principle” has two parts: |
| 1. A concise, one-sentence description of the key mistake to avoid and under what circumstances. |
| 2. A structured representation of the failure pattern, as a list of simple (subject, predicate, object) triplets. |
| [Trajectory Log]: {{trajectory_log}} |
| Final Outcome: FAILURE |
| Your Task: |
| Based on the trajectory, generate the Cautionary Principle. |
| First, on a new line, write {DESCRIPTION_PART_SEPARATOR}. |
| Then, write the one-sentence description of the pitfall. |
| Then, on a new line, write {STRUCTURED_PART_SEPARATOR}. |
| Finally, provide the structured triplets describing the failure pattern in a valid JSON list format. |
| [Example]: |
| {DESCRIPTION_PART_SEPARATOR} |
| When a file download fails with a 404 error, do not immediately retry the download; instead, verify the source URL’s validity first. |
| {STRUCTURED_PART_SEPARATOR} [ (file download, results_in, 404 error), (immediate_retry, is, ineffective), (correct_action, is, verify URL) ] [Output]: |
Table 8: Prompt for Principle Similarity Analysis.
| You are a semantic analysis expert. Determine if two principles describe the same core idea, even if they use different words. |
| --- |
| Principle A: “{summary}” |
| Principle B: “{existing_principle_description}” |
| Do Principle A and Principle B describe the same essential advice or warning? |
| Please answer with only “Yes” or “No”. |
A.3 Exploring the Influence of Experience Internalization
In our proposed framework, all retrieved information (both from the external knowledge base (<information>) and our internal experience base (<experience>)) is treated as context, with loss masked during the model update phase. A natural question arises from this design: while it is sensible to avoid learning the content of transient external documents, could the agent benefit from directly ‘absorbing‘ its own distilled wisdom into its parameters?
To explore this, we conducted a supplementary experiment on the Qwen2.5-3B model. We created a variant, EvolveR w/ exp-absorb, where we selectively unmasked the loss for the retrieved <experience> tokens, allowing the learning signal to flow through them. Our hypothesis was that this might enable the agent to internalize the strategic logic of its principles. The results, presented in Table 9, were insightful. The EvolveR w/ exp-absorb variant exhibited a slight performance degradation compared to our standard approach. We posit that this is due to the challenge of noise in the training signal. In our current implementation, the agent retrieves a set of top- $k$ principles at each step. Not all of these principles may be perfectly relevant to the immediate context. By directly internalizing all retrieved principles without a dynamic quality filter, the agent risks being updated with noisy or even counter-productive signals. This finding suggests that for direct internalization to be effective, it may require more sophisticated mechanisms, such as an auxiliary model to weigh the relevance of each principle before absorption. We believe that developing such mechanisms is a promising future direction towards achieving a fully autonomous cycle of self-exploration, self-distillation, and self-absorption.
Table 9: Ablation study on the experience internalization mechanism. EvolveR w/o exp-absorb treats principles as external context by masking gradients during backpropagation.
| EvolveR EvolveR w exp-absorb | 0.434 $\downarrow$ 0.433 $\downarrow$ | 0.373 $\downarrow$ 0.369 $\downarrow$ | 0.584 $\downarrow$ 0.583 $\downarrow$ | 0.434 $\uparrow$ 0.435 $\uparrow$ | 0.381 $\downarrow$ 0.376 $\downarrow$ | 0.137 $\downarrow$ 0.124 $\downarrow$ | 0.328 $\downarrow$ 0.280 $\downarrow$ | 0.382 $\downarrow$ 0.371 $\downarrow$ |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
A.4 Case Study of EvolveR
We provide a detail rollout case of EvolveR in Table 10
Table 10: A rollout case of EvolveR
| System: System_Prompt |
| --- |
| Question: who was the pinkerton detective agency’s first female detective? |
| Ground Truth: Kate Warne |
| EvolveR: <think> I need to determine who was the first female detective employed by the Pinkerton Detective Agency. This requires identifying the historical context and any notable female figures associated with this agency. Based on prior reasoning experience, I anticipate some potentially useful principles:- Principle 1: (Historical Agency, First Female Employee, Female Detective) - This principle helps identify the first female to hold a specific role within a historical organization. - Principle 2: (Organization, Historical Role, Notable Individual) - This principle assists in linking an organization to a notable individual who played a significant role in its history. </think> <search_experience> - Principle 1: (Historical Agency, First Female Employee, Female Detective) - This principle helps identify the first female to hold a specific role within a historical organization. - Principle 2: (Organization, Historical Role, Notable Individual) - This principle assists in linking an organization to a notable individual who played a significant role in its history. </search_experience> |
| Env: <experience> [Principle 0], type: guiding, metric score: 0.67, description: To identify the first woman to hold a specific significant position within an organization or entity, connect the historical narrative context and mention which event or timeline may signify the position in question… <experience> |
| EvolveR: <think> Based on the experience principles, I plan to apply the principles related to identifying the first female employee in a historical organization and linking this to notable figures. I will also consider using historical documents or specific timelines to confirm the answer. </think> <search_knowledge> - Query: who was the first female detective employed by the Pinkerton Detective Agency? </search_knowledge> |
| Env: <information> Doc 1(Title: ”Kate Warne”)… Doc 2(Title: ”Private investigator”) … Doc 3(Title: ”Kate Warne”)… </information> |
| EvolveR: <think> Based on the retrieved documents, I need to determine who was the first female detective employed by the Pinkerton Detective Agency. I will apply the principles to connect the historical context and notable figures mentioned. - Principle 1: (Historical Agency, First Female Employee, Female Detective) - This principle helps identify the first female detective within the Pinkerton Detective Agency. - Principle 2: (Organization, Historical Role, Notable Individual) - This principle links the Pinkerton Detective Agency to Kate Warne as the first female detective. </think> <search_knowledge> - Query: who was the first female detective employed by the Pinkerton Detective Agency? </search_knowledge> |
| Env: <information> Doc 1(Title: ”Kate Warne”) … Doc 2(Title: ”Private investigator”) … Doc 3(Title: ”Kate Warne”) … </information> |
| EvolveR: <think> Based on the retrieved documents, Kate Warne is identified as the first female detective employed by the Pinkerton Detective Agency. This aligns with the historical context and the principles applied. - Principle 1: (Historical Agency, First Female Employee, Female Detective) - This principle confirms Kate Warne as the first female detective within the Pinkerton Detective Agency. - Principle 2: (Organization, Historical Role, Notable Individual) - This principle links Kate Warne to her role as the first female detective in the agency’s history. </think> <search_knowledge> - Query: who was the first female detective employed by the Pinkerton Detective Agency? </search_knowledge> |
| Env: <information> Doc 1(Title: ”Kate Warne”) … Doc 2(Title: ”Private investigator”) … Doc 3(Title: ”Kate Warne”)… </information> |
| EvolveR: <think> Based on the retrieved documents, Kate Warne is confirmed as the first female detective employed by the Pinkerton Detective Agency. The information aligns with both historical documentation and the application of principles regarding notable figures in organizational history. - Principle 1: (Historical Agency, First Female Employee, Female Detective) - This principle confirms Kate Warne as the first female detective within the Pinkerton Detective Agency. - Principle 2: (Organization, Historical Role, Notable Individual) - This principle links Kate Warne to her role as the first female detective in the agency’s history. </think> |
| <answer> Kate Warne </answer> |
A.5 Limitation and Broader Impact
We acknowledge several limitations and broader implications of our work. The efficacy of our self-distillation mechanism is inherently bounded by the capabilities of the agent’s own model; a less capable model may struggle to distill high-quality principles, thus limiting its evolutionary ceiling. Further research across a broader range of tasks, such as embodied interaction or creative generation, is necessary to fully delineate the boundaries and applicability of the EvolveR paradigm. While our curation mechanisms mitigate experience base growth, ensuring computational efficiency for truly lifelong learning agents also remains an open challenge. Looking forward, the broader impact of this paradigm is significant. On the one hand, EvolveR represents a crucial step towards more autonomous and personalized agents. The explicit nature of its distilled principles also offers a promising avenue for improving interpretability and steerability. On the other hand, this autonomy raises critical safety considerations. An agent that evolves its own principles could develop undesirable strategies if not guided by a robust, value-aligned reward function, necessitating further research into alignment techniques for such self-evolving systems.