# Agent0: Unleashing Self-Evolving Agents from Zero Data via Tool-Integrated Reasoning
**Authors**: Peng Xia, Kaide Zeng, Jiaqi Liu, Can Qin, Fang Wu, Yiyang Zhou, Caiming Xiong, Huaxiu Yao
## Abstract
Large Language Model (LLM) Agents, often trained with Reinforcement Learning (RL), are constrained by a dependency on human-curated data, limiting scalability and tethering AI to human knowledge. Existing self-evolution frameworks offer an alternative but are typically restricted by the model’s inherent capabilities and single-round interactions, hindering the development of complex curricula involving tool use or dynamic reasoning. We introduce Agent0, a fully autonomous framework that evolves high-performing agents without external data through multi-step co-evolution and seamless tool integration. Agent0 establishes a symbiotic competition between two agents initialized from the same base LLM: a curriculum agent that proposes increasingly challenging frontier tasks, and an executor agent that learns to solve them. We integrate external tools to enhance the executor’s problem-solving capacity; this improvement, in turn, pressures the curriculum agent to construct more complex, tool-aware tasks. Through this iterative process, Agent0 establishes a self-reinforcing cycle that continuously produces high-quality curricula. Empirically, Agent0 substantially boosts reasoning capabilities, improving the Qwen3-8B-Base model by 18% on mathematical reasoning and 24% on general reasoning benchmarks. Code is available at https://github.com/aiming-lab/Agent0.
Machine Learning, ICML
<details>
<summary>x1.png Details</summary>
### Visual Description
## Diagram: Curriculum-Executor Agent System Architecture
### Overview
The diagram illustrates a two-agent system with feedback loops for curriculum learning. The **Curriculum Agent** (left) and **Executor Agent** (right) interact through a question (`q`) and reasoning process involving model responses, tool calls, and tool responses. Rewards (`r_C`, `r_E`) are generated based on predicted answers (`â`).
### Components/Axes
- **Left Side (Curriculum Agent)**:
- Labels: "Curriculum Agent" (three anthropomorphic figures: teacher, student, researcher).
- Arrows: Blue arrow labeled `q` (question) pointing to Executor Agent.
- Reward: Blue arrow labeled `r_C` (Curriculum Reward) pointing to `â` (Predicted Answer).
- **Center (Reasoning Process)**:
- Boxes:
- Blue: "Model Response"
- Green: "Tool Calling"
- Orange: "Tool Response"
- Globe icon labeled "Environment."
- **Right Side (Executor Agent)**:
- Labels: "Executor Agent" (three anthropomorphic figures: tool user, evaluator, analyst).
- Arrows: Green arrow labeled `â` (Predicted Answer) pointing to Tool.
- Reward: Green arrow labeled `r_E` (Executor Reward) pointing to `â`.
- **Legend**:
- Blue: Model Response
- Green: Tool Calling
- Orange: Tool Response
### Detailed Analysis
- **Flow**:
1. Curriculum Agent generates a question (`q`).
2. Executor Agent uses tools (e.g., calculator, database) to process `q`.
3. Feedback loops:
- Curriculum Reward (`r_C`) adjusts `â` based on correctness.
- Executor Reward (`r_E`) evaluates tool effectiveness.
### Key Observations
- The system emphasizes iterative learning via rewards and tool integration.
- Tool responses (`Tool Response`) are critical for refining predictions (`â`).
---
## Bar Charts: Task Performance Comparison
### Overview
Four bar charts compare performance metrics (percentage) across tasks: **MATH**, **SuperGPQA**, **MMLU-Pro**, and **BBEH**. Three methods are evaluated: **Owen3-BB**, **w/ tools**, and **Agent0**.
### Components/Axes
- **X-Axis**: Methods (Owen3-BB, w/ tools, Agent0).
- **Y-Axis**: Performance (%) with approximate values:
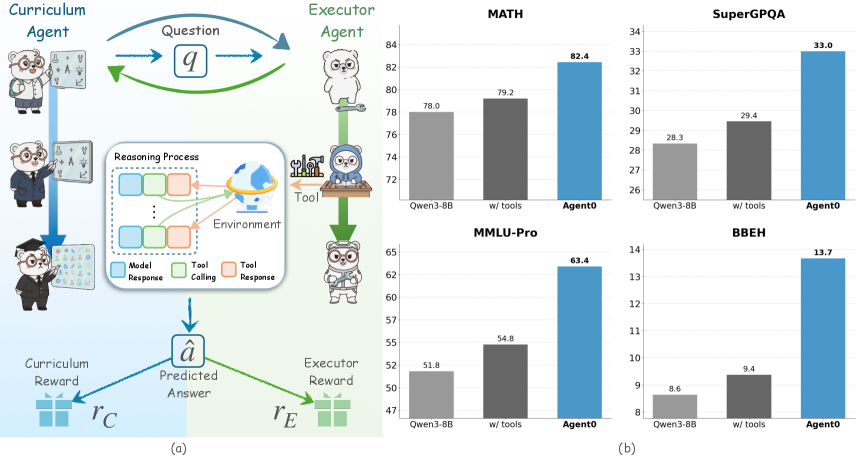
- **MATH**: 78.0% (Owen3-BB), 79.2% (w/ tools), 82.4% (Agent0).
- **SuperGPQA**: 28.3% (Owen3-BB), 29.4% (w/ tools), 33.0% (Agent0).
- **MMLU-Pro**: 51.8% (Owen3-BB), 54.8% (w/ tools), 63.4% (Agent0).
- **BBEH**: 8.6% (Owen3-BB), 9.4% (w/ tools), 13.7% (Agent0).
- **Legend**:
- Blue: Agent0
- Dark Gray: w/ tools
- Light Gray: Owen3-BB
### Detailed Analysis
- **Trends**:
- **Agent0** consistently outperforms other methods across all tasks.
- **w/ tools** improves performance over Owen3-BB but lags behind Agent0.
- **BBEH** shows the lowest scores, indicating poor task alignment.
### Key Observations
- Agent0 achieves **82.4% in MATH** (highest) and **13.7% in BBEH** (lowest among top performers).
- Owen3-BB underperforms in all tasks compared to w/ tools and Agent0.
---
## Interpretation
### System Architecture (Diagram)
The diagram highlights a symbiotic relationship between curriculum and execution agents. The Curriculum Agent focuses on knowledge structuring (`r_C`), while the Executor Agent leverages tools for real-world problem-solving (`r_E`). The feedback loops suggest adaptive learning, where rewards refine both prediction accuracy (`â`) and tool utility.
### Task Performance (Bar Charts)
- **Agent0’s Dominance**: Outperforms baseline methods (Owen3-BB, w/ tools) in all tasks, suggesting superior integration of curriculum learning and tool usage.
- **Tool Impact**: Adding tools (`w/ tools`) improves performance by ~1-5% over Owen3-BB, but Agent0’s holistic approach yields larger gains (e.g., +3.2% in MATH).
- **BBEH Anomaly**: Despite Agent0’s improvement, BBEH scores remain low (≤13.7%), indicating potential task-specific limitations or misalignment with Agent0’s design.
### Implications
- **Agent0’s Strengths**: Effective in structured tasks (MATH, MMLU-Pro) but struggles with BBEH, hinting at domain-specific challenges.
- **Tool Dependency**: While tools enhance performance, Agent0’s end-to-end learning likely reduces reliance on external tools compared to `w/ tools`.
- **Curriculum Reward (`r_C`)**: Critical for aligning predictions (`â`) with educational goals, as seen in Agent0’s consistent gains.
This analysis underscores the value of integrated curriculum-execution systems for adaptive reasoning, with Agent0 representing a significant advancement over incremental tool-based approaches.
</details>
Figure 1: The Agent0 autonomous co-evolution framework. The Curriculum Agent (left) uses RL to generate frontier tasks, rewarded by the Executor Agent’s uncertainty and tool-use frequency. The Executor Agent (right) learn to solve them by RL. This shared tool integration drives a virtuous cycle, spiraling up task complexity and agent capability entirely from scratch.
## 1 Introduction
Large Language Model (LLM) Agents have shown remarkable capabilities in tackling complex, long-horizon problems (Qiu et al., 2025b, a; Jin et al., 2025; Yu et al., 2025a; Tang et al., 2025; Zhai et al., 2025) that require extensive interaction with an environment, such as deep research (OpenAI, 2025; Google, 2024; Team et al., 2025) and agentic coding (Jimenez et al., 2023; Anthropic, 2025; Wang et al., 2024a). To optimize these complex, multi-step interactions and move beyond hard-coded workflows, Reinforcement Learning (RL) has emerged as a principal training paradigm (Ouyang et al., 2022; Shao et al., 2024; Tu et al., 2025), achieving significant progress on complex reasoning tasks. However, the efficacy of these methods, whether Reinforcement Learning from Human Feedback (RLHF) or Reinforcement Learning from Verifiable Rewards (RLVR), relies heavily on massive, high-quality, human-curated datasets (Zhang et al., 2025c). This dependency not only creates a severe scalability bottleneck (Yue et al., 2025), which is time-consuming, labor-intensive, and costly, but also fundamentally tethers the potential of AI to the limits of human knowledge and annotation speed.
To break free from this reliance on human data, self-evolution frameworks have emerged as a promising alternative (Zhao et al., 2025; Liu et al., 2025a; Huang et al., 2025; Wang et al., 2025d), offering a scalable pathway by enabling models to autonomously generate their own training data. Yet, despite their potential, existing self-play or self-challenging approaches face severe constraints. First, their capabilities are capped by the model’s inherent knowledge and reasoning abilities (Fang et al., 2025; Cheng et al., 2024; Zhou et al., 2025a), causing the generated tasks to rarely surpass the model’s current complexity (Zhou et al., 2025b), leading to learning stagnation. Second, these frameworks typically operate only in single-round interactions (Li et al., 2025c), failing to capture the dynamic, context-dependent nature of real-world problems. This dual limitation not only restricts the complexity of the self-generated curriculum but, more critically, hinders the model from mastering essential skills that require complex tool use or multi-step reasoning.
To address these challenges, as demostrated in Figure 1, we introduce Agent0, a fully autonomous framework designed to guide the evolution of agents entirely from scratch. Agent0 completely eliminates the dependence on any external data or human annotations, pioneeringly combining tool integration with multi-round co-evolution. The framework’s implementation begins with a base LLM from which we initialize two functionally distinct agents: an executor agent and a curriculum agent. These agents co-evolve through a symbiotic competition: the curriculum agent is trained using RL (Shao et al., 2024) to propose frontier tasks that precisely challenge the executor’s current capabilities, using the executor’s uncertainty (i.e., self-consistency across multiple answers) and its frequency of tool use as reward signals. Concurrently, the executor agent is trained via RL to successfully solve these tasks, optimizing on a filtered set of challenging problems generated by the frozen curriculum agent and using pseudo-labels derived from its own majority voting. Equipping the executor with a tool enhances its problem-solving abilities, which in turn compels the tool-equipped curriculum agent to generate more complex, tool-based curricula. This establishes a virtuous cycle, driving a synchronous spiral of improvement in both agent capability and curriculum complexity. Furthermore, we extend this paradigm to support multi-turn interactions, enabling the generation of context-rich, conversational tasks that better reflect real-world problem-solving.
The primary contribution of this paper is Agent0, a novel framework that autonomously evolves LLM agents from scratch through tool-augmented reasoning without relying on any external data. Across ten benchmarks spanning mathematical and general reasoning, empirical results show that Agent0 achieves substantial model agnostic capability gains, improving mathematical reasoning performance by 18% and general reasoning performance by 24%. In addition, our analysis confirms this gain is driven by our co-evolutionary loop, where the curriculum agent learns to generate progressively complex tasks, creating a virtuous cycle of the executor’s capability improvement.
## 2 Preliminaries
<details>
<summary>x2.png Details</summary>
### Visual Description
## Flowchart: Multi-Agent System with Policy Update Mechanisms
### Overview
The flowchart depicts a multi-agent system involving a Curriculum Agent, Executor Agent, and Environment. It illustrates data processing, tool interaction, and policy updates via GRPO (Gradient-based Reinforcement Policy Optimization) and ADPO (Adaptive Policy Optimization). Key elements include data filtering, ambiguity signals, and majority voting for decision-making.
### Components/Axes
1. **Agents**:
- **Curriculum Agent**: Processes input data (`x₁, ..., xᵢ`) and outputs filtered data (`p(x)`).
- **Executor Agent**: Interacts with the Environment, generating responses (Model Response, Tool Calling, Tool Response, Final Answer).
2. **Environment**: Contains tools and receives inputs from the Executor Agent.
3. **Policy Update Mechanisms**:
- **GRPO**: Policy update via majority voting of responses (`{y₁₁, ..., yᵢₘ}`).
- **ADPO**: Policy update via majority voting of responses (`{y₁, ..., yᵢ}`).
4. **Legend**:
- **Blue**: Model Response
- **Green**: Tool Calling
- **Orange**: Tool Response
- **Purple**: Final Answer
### Detailed Analysis
1. **Data Flow**:
- **Curriculum Agent**:
- Input: Raw data (`x₁, ..., xᵢ`).
- Output: Filtered data (`p(x)`) after self-consistency checks.
- Ambiguity Signal: Flagged when data uncertainty exceeds thresholds.
- **Executor Agent**:
- Processes filtered data and interacts with the Environment.
- Generates responses categorized by color (see legend).
2. **Environment Interaction**:
- The Executor Agent sends Tool Calling (green) and receives Tool Response (orange).
- Final Answer (purple) is derived from Model Response (blue) and Tool Response.
3. **Policy Updates**:
- **GRPO**: Aggregates responses (`{y₁₁, ..., yᵢₘ}`) via majority voting to update policies.
- **ADPO**: Uses simpler majority voting (`{y₁, ..., yᵢ}`) for policy adjustments.
### Key Observations
- **Majority Voting**: Dominates decision-making in both GRPO and ADPO, suggesting consensus-driven optimization.
- **Ambiguity Handling**: Self-consistency filtering reduces noise, but ambiguity signals indicate unresolved uncertainties.
- **Tool Integration**: The Executor Agent relies on external tools (e.g., APIs, databases) for complex tasks.
### Interpretation
The system emphasizes **robustness** through self-consistency filtering and **adaptability** via dual policy update mechanisms (GRPO and ADPO). The majority voting ensures decisions reflect collective agent responses, while ambiguity signals highlight areas needing human or automated intervention. The Curriculum Agent’s role in preprocessing data ensures the Executor Agent operates on high-quality inputs, reducing errors in tool interactions. The Environment acts as a bridge between theoretical policy updates and practical execution, underscoring the system’s focus on real-world applicability.
</details>
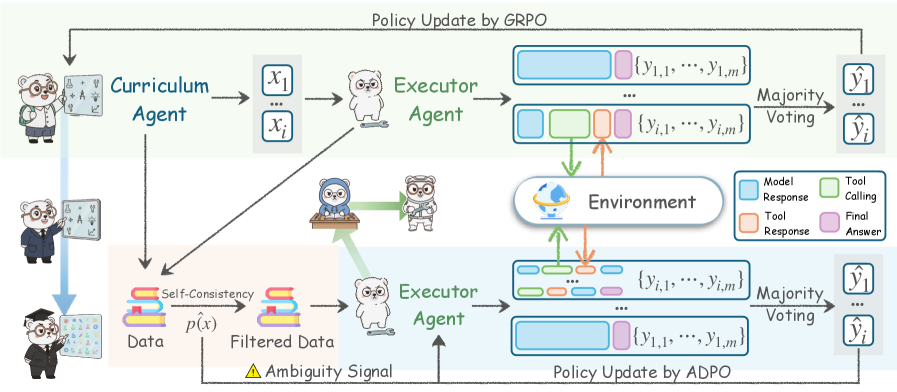
Figure 2: The Agent0 co-evolutionary loop. (1) Curriculum Evolution: The Curriculum Agent $\pi_{\theta}$ is trained via RL to generate tasks, maximizing a reward $R_{C}$ based on executor Uncertainty $R_{\text{unc}}$ , Tool Use $R_{\text{tool}}$ and Repetition Penalty $R_{\text{rep}}$ . (2) Executor Evolution: Tasks are filtered by self-consistency score $\hat{p}$ to create a challenging dataset $\mathcal{D}^{(t)}$ . The Executor Agent $\pi_{\phi}$ is then trained on $\mathcal{D}^{(t)}$ via ADPO, an ambiguity-aware RL method using majority-vote pseudo-labels $\tilde{y}$ .
LLM as a Policy Agent. We formulate the LLM as an agent, represented by a policy $\pi_{\theta}$ with parameters $\theta$ . Given a prompt $x$ , the agent autoregressively generates a response $y\sim\pi_{\theta}(\cdot|x)$ . The general objective of reinforcement learning is to optimize $\theta$ to maximize the expected reward $J(\theta)=\mathbb{E}_{x\sim\mathcal{D},y\sim\pi_{\theta}(\cdot|x)}[R(y|x)]$ .
Group Relative Policy Optimization (GRPO). GRPO (Shao et al., 2024) is a reinforcement learning method that avoids training a critic by using intra-group relative rewards. For each prompt $x$ , the model samples $G$ responses $\{y_{1},\ldots,y_{G}\}$ , which are scored to get rewards $\{r_{1},\ldots,r_{G}\}$ . GRPO computes normalized advantages $\hat{A}_{i}$ using a z-score: $\hat{A}_{i}=\frac{r_{i}-\text{mean}(\{r_{j}\}_{j=1}^{G})}{\text{std}(\{r_{j}\}_{j=1}^{G})+\epsilon_{\text{norm}}}$ , where $\epsilon_{\text{norm}}$ is a small constant for numerical stability. The policy is then updated by minimizing the following PPO-style clipped loss function (Schulman et al., 2017):
$$
\displaystyle\mathcal{L}_{\text{GRPO}}(\theta)=-\frac{1}{G}\sum_{i=1}^{G}\min\Bigg(\frac{\pi_{\theta}(x_{i})}{\pi_{\theta_{\text{old}}}(x_{i})}\hat{A}_{i}, \displaystyle\text{clip}\Big(\frac{\pi_{\theta}(x_{i})}{\pi_{\theta_{\text{old}}}(x_{i})},1-\epsilon,1+\epsilon\Big)\hat{A}_{i}\Bigg)+\beta\text{KL}(\pi_{\theta}\|\pi_{\theta_{\text{old}}}), \tag{1}
$$
where $\frac{\pi_{\theta}(x_{i})}{\pi_{\theta_{\text{old}}}(x_{i})}$ is the importance sampling ratio between the current policy $\pi_{\theta}$ and the reference policy $\pi_{\theta_{\text{old}}}$ from the previous iteration. $\hat{A}_{i}$ is the normalized advantage, and $\epsilon$ and $\beta$ are hyperparameters. The KL-divergence term acts as a regularization penalty to stabilize training.
## 3 The Agent0 Framework
### 3.1 Framework Overview
Agent0 is a fully autonomous, iterative co-evolutionary framework designed to enhance the capabilities of LLM agents without relying on any human-annotated data. At the core of this framework are two functionally distinct agents initialized from the same base LLM, $\pi_{\text{base}}$ : (1) Curriculum Agent ( $\pi_{\theta}$ ) aims to generate frontier tasks that are appropriately challenging for the current Executor Agent; (2) Executor Agent ( $\pi_{\phi}$ ) aims to solve the increasingly complex tasks proposed by the Curriculum Agent.
These two agents co-evolve iteratively through a process of symbiotic competition, as illustrated in Figure 2. Each iteration $t$ of this process is divided into two stages:
Curriculum Evolution. We train the Curriculum Agent $\pi_{\theta}$ using RL to specialize in generating tasks that challenge the current Executor Agent $\pi_{\phi}^{(t-1)}$ .
Executor Evolution. We use the frozen Curriculum Agent $\pi_{\theta}^{(t)}$ to generate a pool of tasks, from which we filter a challenging dataset $\mathcal{D}^{(t)}$ . We then train the Executor Agent $\pi_{\phi}$ on this dataset using RL, evolving it into $\pi_{\phi}^{(t)}$ .
The integration of a code interpreter tool establishes a virtuous cycle: the Executor Agent’s problem-solving capabilities are enhanced by the tool, which in turn compels the tool-equipped Curriculum Agent to generate more complex, tool-based curricula. Furthermore, the framework supports multi-turn interactions, enabling the Curriculum Agent to generate context-rich, conversational tasks that better reflect real-world problem-solving.
### 3.2 Curriculum Agent Training
The goal of the Curriculum Agent $\pi_{\theta}$ , is to generate a prompt $x$ that maximizes a composite reward signal $R_{C}$ . This reward signal is designed to quantify the challenge of task $x$ for the current Executor Agent $\pi_{\phi}$ . We optimize $\pi_{\theta}$ using the GRPO algorithm described in the Section 2.
For each task $x_{i}$ generated by $\pi_{\theta}$ , we compute its reward by sampling $k$ responses $\{y_{j}\}_{j=1}^{k}$ from the current Executor $\pi_{\phi}$ . The composite reward $R_{C}$ consists of two key components:
Algorithm 1 Self-Evolutionary Framework Agent0
0: Base LLM $\pi_{\text{base}}$ ; Iterations $T$ ; Samples $k$ .
1: Initialize $\pi_{\theta}^{(0)}\leftarrow\pi_{\text{base}}$ and $\pi_{\phi}^{(0)}\leftarrow\pi_{\text{base}}$ .
2: for each iteration $t=1,\dots,T$ do
3: $\triangleright$ Curriculum Evolution (Train $\pi_{\theta}$ )
4: Initialize $\pi_{\theta}\leftarrow\pi_{\theta}^{(t-1)}$
5: Generate a batch of tasks $X=\{x_{i}\}\sim\pi_{\theta}$
6: for task $x_{i}\in X$ do
7: Sample $k$ responses $\{y_{j}\}_{j=1}^{k}\sim\pi_{\phi}^{(t-1)}(x_{i})$
8: Compute $R_{C}(x_{i})$ using Eq. 5
9: end for
10: Update $\pi_{\theta}$ using $\mathcal{L}_{\text{GRPO}}$ with $(X,R_{C})$ $\to$ $\pi_{\theta}^{(t)}$
11: $\triangleright$ Executor Evolution (Train $\pi_{\phi}$ )
12: Generate $X_{\text{pool}}\sim\pi_{\theta}^{(t)}$ and filter to $\mathcal{D}^{(t)}=\{(x,\hat{p},\tilde{y})\}$ where $|\hat{p}(x)-0.5|\leq\delta$
13: Initialize $\pi_{\phi}\leftarrow\pi_{\phi}^{(t-1)}$
14: for batch $B_{\mathcal{D}}=\{(x,\hat{p}(x),\tilde{y})\}\sim\mathcal{D}^{(t)}$ do
15: Initialize $\mathcal{T}_{\text{batch}},\tilde{\mathcal{A}}_{\text{batch}},\mathcal{P}_{\text{batch}}$
16: for $(x,\hat{p}(x),\tilde{y})\in B_{\mathcal{D}}$ do
17: Sample $k$ trajectories $\{\tau_{i}\}_{i=1}^{k}\sim\pi_{\phi}(x)$
18: Compute rewards $R_{i}=\mathbb{I}(o_{i}=\tilde{y})$
19: Compute scaled advantages $\tilde{A}_{i}\leftarrow A_{i}\cdot f(\hat{p}(x))$
20: Add $\{\tau_{i}\}$ to $\mathcal{T}_{\text{batch}}$ , $\{\tilde{A}_{i}\}$ to $\tilde{\mathcal{A}}_{\text{batch}}$ , $\hat{p}(x)$ to $\mathcal{P}_{\text{batch}}$
21: end for
22: Update $\pi_{\phi}$ using $\mathcal{L}_{\text{ADPO}}$ (Eq. 8) on collected batch
23: end for
24: $\pi_{\phi}^{(t)}\leftarrow\pi_{\phi}$
25: end for
Uncertainty Reward. This reward incentivizes the Curriculum Agent to generate tasks that the Executor finds confusing or uncertain (Shi et al., 2025; Bae et al., 2025). We use the Executor’s self-consistency $\hat{p}(x;\pi_{\phi})$ as a proxy for uncertainty. $\hat{p}$ is defined as the proportion of the $k$ responses that vote for the majority answer ( $\tilde{y}$ ). The reward function is designed to be maximized when $\hat{p}=0.5$ , where the Executor’s uncertainty is highest:
$$
R_{\text{unc}}(x;\pi_{\phi})=1-2\left|\hat{p}(x;\pi_{\phi})-0.5\right| \tag{2}
$$
This function penalizes tasks that are either too easy ( $\hat{p}\to 1$ ) or too hard ( $\hat{p}\to 0$ ).
Tool Use Reward. To drive the virtuous cycle, we must explicitly reward tasks that prompt the Executor to use its tool. We define $R_{\text{tool}}$ based on the number of tool invocations, identified by the tool response marker, i.e., ‘‘‘output, within a complete prediction $y=\pi_{\phi}(x)$ . Let $N_{\text{tool}}(y)$ be the total count of these markers in $y$ . The reward is then calculated as a weighted, capped value:
$$
R_{\text{tool}}(x;\pi_{\phi})=\gamma\cdot\min(N_{\text{tool}}(y),C) \tag{3}
$$
where $\gamma$ is a scaling hyperparameter for reward score and $C$ is a cap on the number of rewarded calls to prevent rewarding excessive or spurious tool use.
Repetition Penalty. To encourage diversity within a training batch $X$ , following (Huang et al., 2025), we introduce a repetition penalty $R_{\text{rep}}$ . We first compute pairwise distances between generated tasks using a similarity metric, such as BLEU score (Papineni et al., 2002): $d_{ij}=1-\text{BLEU}(x_{i},x_{j})$ . Tasks are then grouped into clusters $\mathcal{C}=\{C_{1},...,C_{K}\}$ where $d_{ij}<\tau_{\text{BLEU}}$ . The penalty for a task $x_{i}$ belonging to cluster $C_{k}$ is proportional to its relative cluster size:
$$
R_{\text{rep}}(x_{i})=\lambda_{\text{rep}}\frac{|C_{k}|}{B}, \tag{4}
$$
where $B$ is the batch size and $\lambda_{\text{rep}}$ is a scaling factor.
Composite Reward. The final reward combines these signals, subtracting the repetition penalty, and is gated by a format check $R_{\text{format}}$ .
$$
\begin{split}R_{C}(x_{i})={}&R_{\text{format}}(x_{i})\cdot\max(0,(\lambda_{\text{unc}}R_{\text{unc}}\\
&\hskip 17.00024pt+\lambda_{\text{tool}}R_{\text{tool}})-R_{\text{rep}}(x_{i}))\end{split} \tag{5}
$$
where $\lambda_{\text{unc}}$ , $\lambda_{\text{tool}}$ , and $\lambda_{\text{rep}}$ are hyperparameters. We use this $R_{C}$ as the reward $r_{i}$ in the GRPO loss.
### 3.3 Executor Agent Training
The Executor Agent $\pi_{\phi}$ ’s objective is to maximize its success rate in solving tasks generated by the Curriculum Agent $\pi_{\theta}$ . This stage of training is also based on GRPO.
#### 3.3.1 Dataset Curation and Trajectory Generation
Challenging Dataset Construction. After the Curriculum Agent $\pi_{\theta}^{(t)}$ is trained, we freeze it. We use it to generate a large pool of candidate tasks $X_{\text{pool}}$ . For each task $x$ in this pool, we have the current Executor $\pi_{\phi}^{(t-1)}$ sample $k$ responses and calculate its self-consistency $\hat{p}(x)$ . It is calculated as the proportion of responses that voted for this majority answer $\tilde{y}$ :
$$
\hat{p}(x)=\frac{1}{k}\sum_{i=1}^{k}\mathbb{I}(o_{i}=\tilde{y}),\quad\tilde{y}=\underset{y}{\text{argmax}}\sum_{i=1}^{k}\mathbb{I}(o_{i}=y), \tag{6}
$$
where $\mathbb{I}$ is the indicator function. To build an efficient training curriculum, we filter for tasks that lie at the capability frontier. So we retain only those tasks whose self-consistency scores fall within an informative band:
$$
\mathcal{D}^{(t)}=\left\{x\in X_{\text{pool}}\mid\left|\hat{p}(x;\pi_{\phi}^{(t-1)})-0.5\right|\leq\delta\right\}, \tag{7}
$$
where $\delta$ is a threshold controlling the curriculum difficulty. This filtering step ensures that $\pi_{\phi}$ trains only on tasks that are neither too easy nor too hard for it.
Multi-Turn Rollout. We replace the standard single-turn generation with a multi-step, tool-integrated rollout process. During this process, each of the $k$ trajectories is generated by having the policy $\pi_{\phi}^{(t-1)}$ first produce text reasoning $t_{1}$ . When the policy emits a tool-call trigger (i.e., ‘‘‘python...‘‘‘ tags), generation is paused. The code $c_{1}$ is then executed in a sandbox, which returns an execution result or error $f_{1}$ . This feedback $f_{1}$ , prepended with a simple prefix like ‘‘‘output...‘‘‘, is fed back to the policy. The policy then continues generating, conditioning on the history and the new feedback $[t_{1}\oplus c_{1}\oplus f_{1}\oplus...]$ . This iterative process repeats until the policy generates a final answer $o$ (i.e., in {boxed...} tags), resulting in a complete, hybrid reasoning trajectory. This dynamic, interleaved feedback mechanism allows the agent to iteratively refine its reasoning and correct errors, mimicking the “aha moment” of self-correction.
Pseudo-Label Advantage. After generating $k$ full trajectories and identifying their $k$ final answers $\{o_{i}\}_{i=1}^{k}$ , we use the previously determined majority answer $\tilde{y}$ as the pseudo-label. We then assign a terminal reward $R_{i}=\mathbb{I}(o_{i}=\tilde{y})$ to each trajectory based on whether its answer $o_{i}$ matches this pseudo-label. This outcome reward $R_{i}$ is used to compute the advantage $A_{i}$ for the entire multi-step trajectory $i$ .
#### 3.3.2 Ambiguity-Dynamic Policy Optimization
Standard GRPO treats all training samples equally (Schulman et al., 2017; Shao et al., 2024). However, in our self-evolutionary setting, we rely on majority voting to derive pseudo-labels, which introduces two critical issues: label noise and restricted exploration on ambiguous tasks. To address these, we propose Ambiguity-Dynamic Policy Optimization (ADPO), which incorporates two key modifications motivated by the data’s ambiguity signal $\hat{p}(x)$ .
Ambiguity-Aware Advantage Scaling. The first issue is that for high-ambiguity tasks (low $\hat{p}(x)$ ), the majority answer is prone to errors. Directly optimizing on these noisy labels using standard GRPO risks reinforcing incorrect reasoning. To prevent overfitting to potentially inaccurate pseudo-labels, we scale the normalized advantage $\hat{A}_{i}$ . We define a scaling factor $s(x)=f(\hat{p}(x))$ , where $f$ is an increasing function of self-consistency. The advantage is modified as $\tilde{A}_{i}(x)=\hat{A}_{i}\cdot s(x)$ . This proportionally down-weights the training signal from unreliable, low-consistency samples.
<details>
<summary>images/high_clip.png Details</summary>
### Visual Description
## Line Graph: Mean Up-Clipped Probability Over Steps
### Overview
The image depicts a line graph illustrating the trend of "Mean Up-Clipped Probability" across sequential "Steps" (0 to 100). The blue line exhibits a general downward trajectory with localized fluctuations, starting near 0.004 and stabilizing around 0.001 by Step 100.
### Components/Axes
- **Y-Axis (Left)**: Labeled "Mean Up-Clipped Probability," scaled logarithmically from 0.000 to 0.004 in increments of 0.001.
- **X-Axis (Bottom)**: Labeled "Step," with integer markers at 0, 20, 40, 60, 80, and 100.
- **Line**: A single blue line representing the data series, positioned centrally in the plot area.
### Detailed Analysis
- **Initial Phase (Steps 0–20)**: The line begins at approximately 0.004, with sharp oscillations between 0.003 and 0.004. A notable dip occurs near Step 10, reaching ~0.003.
- **Mid-Phase (Steps 20–60)**: A steady decline to ~0.002 by Step 40, followed by minor fluctuations (0.0015–0.0025) until Step 60.
- **Final Phase (Steps 60–100)**: Further reduction to ~0.001 by Step 80, with stabilization and minor oscillations (0.0008–0.0012) toward Step 100.
### Key Observations
1. **Downward Trend**: The mean up-clipped probability decreases monotonically over time, suggesting a stabilizing or converging process.
2. **Fluctuations**: Localized spikes (e.g., Step 5, 25, 70) indicate transient variability, possibly due to noise or model adjustments.
3. **Stabilization**: By Step 80, the line flattens, implying diminishing changes in the probability metric.
### Interpretation
The data suggests a system where the "Mean Up-Clipped Probability" diminishes as steps progress, potentially reflecting iterative refinement or decay in a modeled process. The initial volatility may stem from transient factors, while the later stabilization indicates equilibrium. The absence of a legend implies a single data series, and the logarithmic y-axis emphasizes relative changes over absolute values. This trend could be critical for understanding convergence rates in algorithms, decay in probabilistic models, or similar phenomena.
</details>
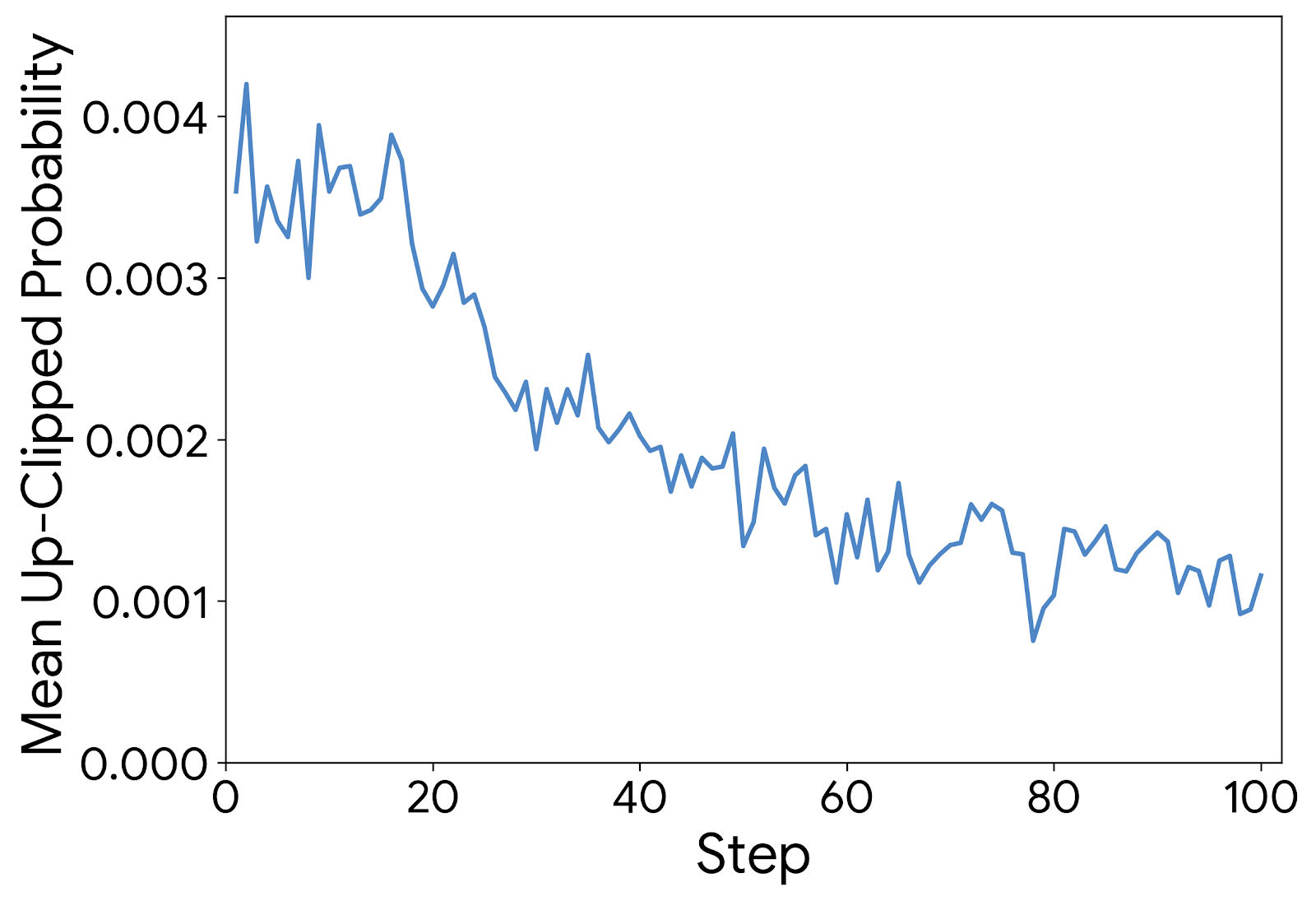
Figure 3: Up-clipped token probabilities. Most up-clipped tokens have low probabilities, implying standard clipping limits exploration.
Ambiguity-Modulated Trust Regions. The second issue pertains to the rigid constraints imposed by standard proximal algorithms (Yu et al., 2025b). While static clipping (e.g., $\epsilon$ ) is designed to ensure stability, it creates an asymmetric barrier to learning. As illustrated in Figure 3, empirical analysis reveals that the upper clipping bound is predominantly triggered by tokens with low probabilities. This indicates that the standard mechanism disproportionately “clamps” the growth of unlikely tokens, effectively stifling the emergence of new reasoning paths. This restriction is particularly detrimental for high-ambiguity tasks (low $\hat{p}(x)$ ), where the correct reasoning often resides in the tail of the current policy distribution and requires significant updates to surface. To address this bottleneck, ADPO dynamically modulates the trust region. We define the upper clipping bound $\epsilon_{\text{high}}(x)$ as a decreasing function of $\hat{p}(x)$ . This effectively relaxes the constraint for ambiguous inputs, permitting larger gradient steps to uplift potential low-probability solutions, while retaining tight bounds on confident samples to preserve stability.
The Executor Agent is updated by minimizing the ADPO objective:
$$
\displaystyle\mathcal{L}_{\text{ADPO}}(\theta)= \displaystyle\mathbb{E}_{x\sim D^{(t)}}\Bigg[-\frac{1}{G}\sum_{i=1}^{G}\min\Bigg(r_{i}(\theta){\color[rgb]{0,0,1}\definecolor[named]{pgfstrokecolor}{rgb}{0,0,1}\tilde{A}_{i}(x)}, \displaystyle\text{clip}\Big(r_{i}(\theta),1-\epsilon_{\text{low}},1+{\color[rgb]{0,0,1}\definecolor[named]{pgfstrokecolor}{rgb}{0,0,1}\epsilon_{\text{high}}(x)}\Big){\color[rgb]{0,0,1}\definecolor[named]{pgfstrokecolor}{rgb}{0,0,1}\tilde{A}_{i}(x)}\Bigg)\Bigg], \tag{8}
$$
where $r_{i}(\theta)$ is the importance sampling ratio, $\tilde{A}_{i}(x)$ is the ambiguity-scaled advantage, and $\epsilon_{\text{high}}(x)$ is the dynamic upper bound inversely related to $\hat{p}(x)$ .
## 4 Experiments
Table 1: Comprehensive results on mathematical reasoning benchmarks. The peak performance achieved during each model’s training process is highlighted in bold.
| Base Model | ✗ | ✗ | 42.6 | 45.7 | 38.2 | 68.2 | 87.8 | 41.0 | 6.15 | 10.9 |
| --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Qwen3-4B-Base | | | | | | | | | | |
| Base Model w/ tool | ✓ | ✗ | 44.2 | 46.3 | 39.6 | 71.0 | 88.6 | 43.7 | 7.71 | 12.3 |
| + Absolute Zero | ✓ | ✗ | 46.4 | 50.0 | 41.9 | 76.2 | 89.3 | 41.5 | 13.4 | 12.2 |
| + SPIRAL | ✗ | ✗ | 47.0 | 57.5 | 42.4 | 76.4 | 91.0 | 38.4 | 10.0 | 13.3 |
| + R-Zero | ✗ | ✗ | 49.1 | 57.3 | 52.9 | 79.6 | 92.1 | 44.6 | 4.27 | 12.7 |
| + Agent0 | ✓ | ✗ | 52.5 | 60.6 | 55.6 | 80.5 | 92.6 | 46.7 | 14.1 | 17.4 |
| Qwen3-8B-Base | | | | | | | | | | |
| Base Model | ✗ | ✗ | 49.2 | 52.0 | 50.0 | 78.0 | 89.1 | 44.7 | 16.7 | 13.9 |
| Base Model w/ tool | ✓ | ✗ | 53.2 | 60.3 | 54.9 | 79.2 | 90.7 | 47.9 | 18.7 | 20.9 |
| + Absolute Zero | ✓ | ✗ | 52.6 | 62.5 | 52.9 | 76.6 | 92.0 | 47.8 | 18.2 | 18.4 |
| + R-Zero | ✗ | ✗ | 54.7 | 61.7 | 60.7 | 82.0 | 94.1 | 48.9 | 19.2 | 16.4 |
| + Socratic-Zero | ✗ | ✓ | 56.1 | 63.7 | 52.4 | 81.2 | 87.3 | 55.1 | 24.5 | 28.4 |
| + Agent0 | ✓ | ✗ | 58.2 | 62.4 | 61.3 | 82.4 | 94.5 | 54.0 | 24.8 | 28.0 |
Table 2: Results on general-domain reasoning benchmarks.
| Base Model | ✗ | ✗ | 27.1 | 42.6 | 20.9 | 37.4 | 7.57 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| Qwen3-4B-Base | | | | | | | |
| Base Model w/ tool | ✓ | ✗ | 30.3 | 44.2 | 25.8 | 42.9 | 8.32 |
| + Absolute Zero | ✓ | ✗ | 33.6 | 46.4 | 27.1 | 52.6 | 8.3 |
| + SPIRAL | ✗ | ✗ | 34.2 | 47.0 | 27.1 | 53.2 | 9.57 |
| + R-Zero | ✗ | ✗ | 34.6 | 49.1 | 27.6 | 51.5 | 10.4 |
| + Agent0 | ✓ | ✗ | 37.6 | 52.5 | 29.9 | 55.9 | 12.0 |
| Qwen3-8B-Base | | | | | | | |
| Base Model | ✗ | ✗ | 34.5 | 49.2 | 28.3 | 51.8 | 8.6 |
| Base Model w/ tool | ✓ | ✗ | 36.7 | 53.2 | 29.5 | 54.8 | 9.37 |
| + Absolute Zero | ✓ | ✗ | 39.9 | 52.6 | 33.5 | 62.5 | 10.8 |
| + R-Zero | ✗ | ✗ | 38.7 | 54.7 | 31.4 | 58.2 | 10.6 |
| + Socratic-Zero | ✗ | ✓ | 39.2 | 56.1 | 30.1 | 60.9 | 9.5 |
| + Agent0 | ✓ | ✗ | 42.1 | 58.2 | 33.0 | 63.4 | 13.7 |
In this section, we evaluate the performance of Agent0, aiming to answer the following questions: (1) How does the performance of Agent0 compare against state-of-the-art self-evolving baselines? (2) Is the proposed co-evolutionary loop effective at progressively improving the agents’ performance over multiple iterations? (3) How effective is each key component of our framework? (4) Can the mathematical reasoning abilities cultivated by Agent0 generalize to improve performance on general-domain reasoning tasks?
### 4.1 Experimental Setup
Implementation Details. Our framework Agent0, is implemented based on the VeRL (Sheng et al., 2025). We evaluate Agent0 on two base models: Qwen3-4B-Base and Qwen3-8B-Base (Yang et al., 2025a). Both the two Agent are initialized from these base models. During the co-evolutionary loop, for each task $x_{i}$ , we sample $k=10$ responses from the Executor to compute uncertainty and generate pseudo-labels. The task filtering threshold is set to $\delta=0.25$ , retaining tasks with a self-consistency $\hat{p}(x)$ between 0.3 and 0.8. For the Curriculum Agent, we set the tool reward scaling $\lambda_{\text{tool}}=0.6$ and cap $C=4$ . For the Executor Agent, we integrate a sandboxed code interpreter (Cheng et al., 2025) based on VeRL-Tool (Jiang et al., 2025), allowing it to execute code snippets enclosed in ‘‘‘python...‘‘‘ tags and receive the ‘‘‘output...‘‘‘.
Baseline Methods. We compare Agent0 against several state-of-the-art self-improvement methods. 1) Base Model: The pre-trained base model without any fine-tuning. 2) Base Model w/ tool: The base model evaluated in a zero-shot setting, but given access to the code interpreter. 3) Self-Evolving Methods: R-Zero (Huang et al., 2025), Absolute Zero (Zhao et al., 2025), SPIRAL (Liu et al., 2025a) and Socratic-Zero (Wang et al., 2025d).
Evaluation Datasets and Metrics. Agent0 requires no human-annotated data for training. We evaluate all methods on two suites of benchmarks: 1) Mathematical Reasoning: We use a comprehensive set including AMC, Minerva (Lewkowycz et al., 2022), MATH (Hendrycks et al., 2021), GSM8K (Cobbe et al., 2021), Olympiad-Bench (He et al., 2024), AIME25, and AIME24. 2) General-Domain Reasoning: To measure generalization, we use SuperGPQA (Du et al., 2025), MMLU-Pro (Wang et al., 2024b), and BBEH (Kazemi et al., 2025). We report the accuracy (pass@1) based on greedy decoding across all benchmarks, except AMC and AIME benchmarks (mean@32).
### 4.2 Main Results
We present the main results for mathematical reasoning in Table 1 and for general-domain reasoning in Table 2.
Comparison with Baselines. It significantly outperforms all compared baseline methods in both mathematics and general-domain reasoning. On Qwen3-8B-Base, Agent0 surpasses the powerful data-free method R-Zero by 6.4% and outperforms the self-play method Absolute Zero, which utilizes a code executor, by 10.6%. It even exceeds Socratic-Zero by 3.7%, which relies on external OpenAI APIs. This demonstrates the superiority of Agent0’s self-evolution approach. By using tools to interact with the environment, the agent effectively enhances the quality and diversity of questions generated by the curriculum agent. Similarly, for the execution agent, this more effectively improves its problem-solving capabilities.
Generalization to General-Domain Tasks. Furthermore, Table 2 shows strong evidence of generalization. On Qwen3-8B, Agent0 achieves the highest overall average score among all approaches, significantly outperforming other data-free methods. This indicates that the complex, multi-step reasoning abilities we cultivated in the execution agent by using the curriculum agent with tools, can be effectively transferred to general-domain tasks.
### 4.3 Analysis
In this section, we provide a detailed analysis of each module’s performance, along with a series of analytical experiments, to better understand the performance gains.
Table 3: Ablation study of Agent0.
| Method Agent0 Curriculum Agent | General AVG 36.7 | Math AVG 58.2 |
| --- | --- | --- |
| w/o Training | 29.5 | 46.8 |
| w/o Tool Reward | 31.8 | 48.7 |
| w/o Repetition Penalty | 31.3 | 47.9 |
| Execution Agent | | |
| w/o ADPO | 34.9 | 56.2 |
| w/o Multi-turn | 35.3 | 55.9 |
Ablation Study. As shown in Table 3, we conducted a series of ablation experiments to evaluate the impact of each component in our method. Specifically, we evaluate the impact of: (1) the curriculum agent’s training, (2) the tool reward, (3) the repetition penalty, (4) our ambiguity scaling mechanism, and (5) the multi-turn reasoning capability. For the curriculum agent, without training, the performance significantly drops by 9.3%. This reflects the value of the learned curriculum. Next, when the tool reward is not included, the model’s performance drops by 7.2%. This tests our core hypothesis that explicitly rewarding tool-use tasks is necessary. It shows a severe performance degradation when we remove the diversity component, indicating that $R_{\text{rep}}$ is highly effective for curriculum diversity, particularly for general tasks. As for the execution agent, training it using the original GRPO with standard advantage and clipping resulted in a performance drop of 1.9%. This is because the original algorithm does not account for the reliability of pseudo-labels, demonstrating the effectiveness of our proposed ambiguity scaling mechanism. The introduction of multi-turn reasoning played a significant role in boosting Agent0’s performance, especially for complex mathematical reasoning that requires multi-turn reasoning.
<details>
<summary>images/co_evo.png Details</summary>
### Visual Description
## Bar Charts: Model Accuracy Comparison (Math vs General Averages)
### Overview
The image contains two side-by-side bar charts comparing the accuracy of two AI models (Qwen3-4B and Qwen3-8B) across three iterations (Iter1, Iter2, Iter3) for two evaluation categories: Math Average and General Average. The charts use vertical bars with distinct color coding for model differentiation.
### Components/Axes
- **X-axis (Horizontal)**: Labeled "Iteration" with three categories: Iter1, Iter2, Iter3
- **Y-axis (Vertical)**: Labeled "Accuracy" with scales:
- Math AVG: 50-60 (increments of 2)
- General AVG: 30-40 (increments of 2)
- **Legends**:
- Green bars: Qwen3-4B
- Blue bars: Qwen3-8B
- **Chart Titles**:
- Left: "Math AVG"
- Right: "General AVG"
- **Bar Colors**:
- Qwen3-4B: Light green (#98df8a)
- Qwen3-8B: Light blue (#aec7e8)
### Detailed Analysis
**Math AVG Chart**:
- Iter1:
- Qwen3-4B: ~52.0 (±0.5)
- Qwen3-8B: ~55.2 (±0.5)
- Iter2:
- Qwen3-4B: ~52.5 (±0.5)
- Qwen3-8B: ~55.7 (±0.5)
- Iter3:
- Qwen3-4B: ~52.7 (±0.5)
- Qwen3-8B: ~58.2 (±0.5)
**General AVG Chart**:
- Iter1:
- Qwen3-4B: ~31.5 (±0.5)
- Qwen3-8B: ~36.0 (±0.5)
- Iter2:
- Qwen3-4B: ~32.0 (±0.5)
- Qwen3-8B: ~36.3 (±0.5)
- Iter3:
- Qwen3-4B: ~32.7 (±0.5)
- Qwen3-8B: ~36.8 (±0.5)
### Key Observations
1. **Model Performance Gap**: Qwen3-8B consistently outperforms Qwen3-4B in both categories, with a larger margin in Math AVG (3.0-6.0 points difference) than General AVG (4.0-4.5 points difference).
2. **Iteration Trends**:
- Math AVG shows a significant accuracy jump for Qwen3-8B in Iter3 (+3.0 points from Iter2)
- General AVG demonstrates steady incremental improvements across all iterations
3. **Model Size Correlation**: The 8B parameter model (Qwen3-8B) maintains higher accuracy across all iterations and categories compared to the 4B parameter model.
### Interpretation
The data suggests that larger model size (Qwen3-8B) correlates with superior performance in both mathematical reasoning and general knowledge tasks. The pronounced improvement in Math AVG during Iter3 for Qwen3-8B may indicate specialized optimization for mathematical tasks in later training iterations. The consistent performance gap across all iterations implies architectural advantages in the 8B model that persist regardless of training iteration. These findings could inform deployment decisions where computational resources allow for larger models, particularly in math-intensive applications.
</details>
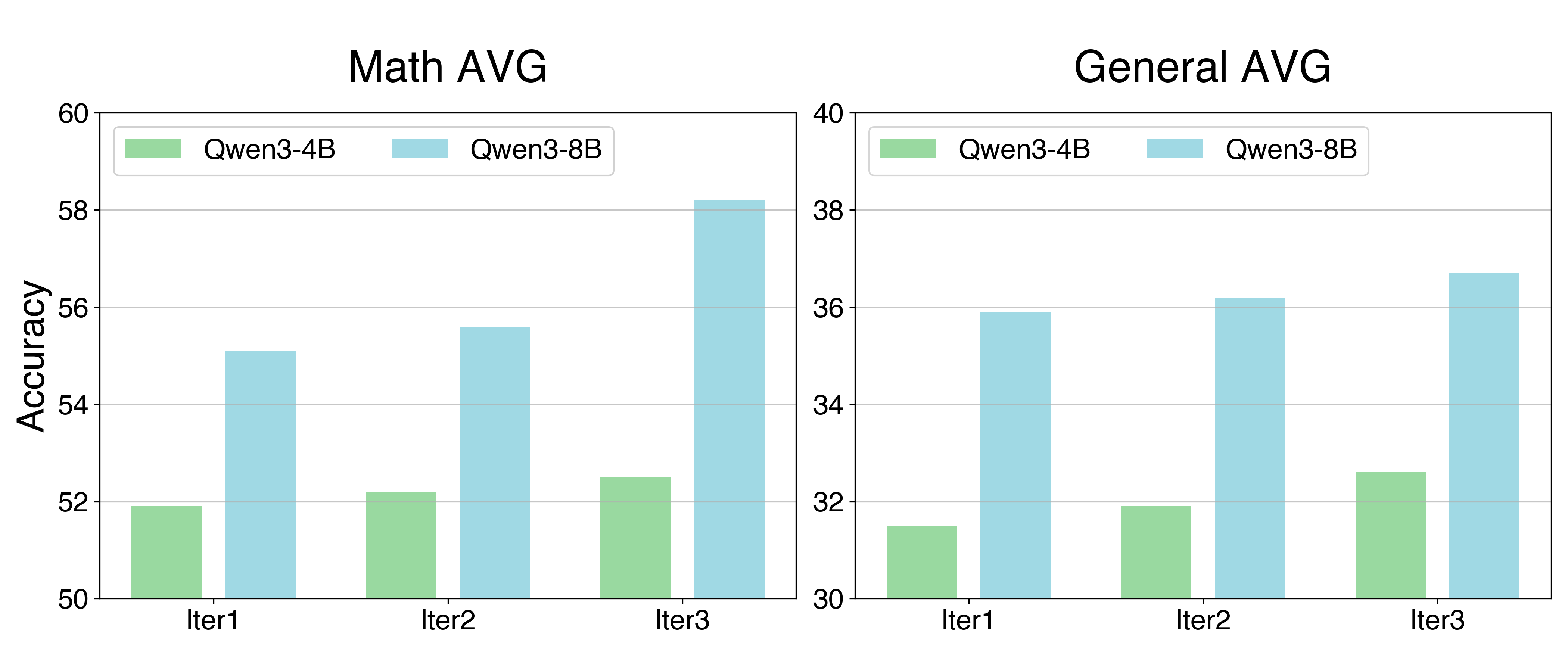
Figure 4: Performance on mathematical and general reasoning benchmarks, showing consistent improvement for both Qwen3-4B and Qwen3-8B across three co-evolutionary iterations.
Consistent Improvement through Co-Evolution. As shown in Figure 4, our method demonstrates stable and progressive improvement during the iterative process. On Qwen3-8B-Base, the average math score improved from 55.1 (Iter 1) to 56.5 (Iter 2), peaking at 58.2 (Iter 3). In addition to mathematics, Agent0 showed the similar trend on other general-domain reasoning tasks, with an average improvement of 2% per iteration compared to the previous one. This iterative gain validates the effectiveness of our co-evolutionary loop. With the involvement of tools, the curriculum agent progressively generates more difficult tasks, while the execution agent learns to solve these tasks more efficiently. This also confirms that agent self-evolution is a reasonable and promising direction (Huang et al., 2025).
Table 4: Comparison on non-tool and other tool-integrated baselines.
| Qwen3-4B w/o Tool +SPIRAL | 42.6 47.0 | 22.0 30.0 |
| --- | --- | --- |
| +R-Zero | 49.1 | 29.8 |
| w/ Tool | | |
| +TIR | 44.2 | 25.7 |
| +Absolute Zero | 46.4 | 29.3 |
| + Agent0 | 52.5 | 32.6 |
Strategic Tool Integration Matters. Our advantage lies not just in having a tool, but in learning how to use it. As shown in Table 4, merely providing a tool (i.e., Base Model w/ Tool) yields a slight performance boost. Agent0 significantly outperforms other tool-using baselines, such as Absolute Zero. Agent0 also significantly surpasses non-tool methods like R-Zero and SPIRAL. This indicates that our curriculum agent, by using the $R_{\text{tool}}$ reward to explicitly incentivize the generation of complex tasks requiring tool use, is far more effective than methods that only use tools for validation (e.g., Absolute Zero) or do not use tools at all (e.g., R-Zero). Furthermore, the execution agent utilizes the tool in conjunction with multi-step reasoning, which also leads to performance gains, resulting in co-evolution.
<details>
<summary>x3.png Details</summary>
### Visual Description
## Screenshot: Math Problem Set with Model Output and Python Code
### Overview
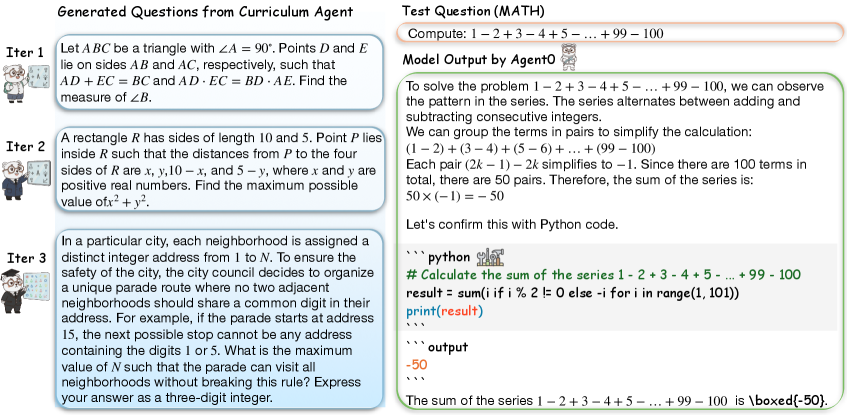
The image displays a structured math problem set with three generated questions (Iter 1-3) and a test question (MATH) involving series summation. It includes a model output explaining the solution approach and Python code to verify the result.
### Components/Axes
- **Question Sections**:
- **Iter 1**: Triangle geometry problem with labeled points (A, B, C, D, E) and angle constraints.
- **Iter 2**: Rectangle optimization problem with coordinate constraints.
- **Iter 3**: Combinatorial optimization problem involving digit constraints.
- **Test Question (MATH)**:
- Problem: Compute the alternating sum `1 - 2 + 3 - 4 + 5 - ... + 99 - 100`.
- Model Output: Explanation of pairing terms to simplify calculation.
- Python Code: Implementation to calculate the sum programmatically.
### Detailed Analysis
#### Iter 1
- **Problem**: Triangle ABC with ∠A = 90°. Points D and E on AB and AC satisfy AD + EC = BC and AD · EC = BD · AE. Find ∠B.
- **Key Elements**: Right triangle, geometric constraints, angle measurement.
#### Iter 2
- **Problem**: Rectangle R (10x5) with point P inside. Distances from P to sides are x, y, 10−x, 5−y. Maximize x² + y².
- **Key Elements**: Coordinate geometry, optimization under constraints.
#### Iter 3
- **Problem**: City parade route with digit constraints (digits 1/5). Find maximum N allowing visitation of all neighborhoods without breaking rules.
- **Key Elements**: Integer constraints, combinatorial pathfinding.
#### Test Question (MATH)
- **Problem**: Compute `1 - 2 + 3 - 4 + 5 - ... + 99 - 100`.
- **Model Output**:
- **Approach**: Pair terms as (1-2), (3-4), ..., (99-100), each simplifying to -1.
- **Calculation**: 50 pairs × (-1) = -50.
- **Python Code**:
</details>
Figure 5: Qualitative Case Analysis. Left: Examples of generated questions showing a clear increase in complexity and diversity from Iter 1 to Iter 3. Right: A demonstration of Agent0’s solving process, utilizing a hybrid approach of mathematical reasoning and Python code execution to solve a standard MATH problem.
Evolution of Task Difficulty and Tool Use. We analyze the tasks generated by the curriculum agent during the training iterations. We sample 200 questions from each iteration for this analysis. As shown in Table 5, the pass rate of the execution agent (from Iteration 1) progressively decreases when evaluated on task sets generated by the curriculum agents from Iterations 1, 2, and 3. This indicates that the task difficulty is gradually increasing, confirming that the curriculum adapts to the improvement in the executor’s capabilities. More importantly, the average number of tool calls per generated task steadily increases across iterations. This directly proves that our $R_{\text{tool}}$ reward successfully guides the curriculum agent to generate more complex and tool-reliant problems, thereby driving a virtuous cycle.
Table 5: Evolution of Task Difficulty and Tool Use. We report the pass rate of the fixed Execution Agent (from Iteration 1) on datasets generated by the Curriculum Agent at different stages.
| $\mathcal{D}_{\text{Iter 1}}$ $\mathcal{D}_{\text{Iter 2}}$ $\mathcal{D}_{\text{Iter 3}}$ | 64.0 58.5 51.0 | 1.65 2.10 2.60 |
| --- | --- | --- |
Qualitative Analysis. Figure 5 illustrates the co-evolution of task complexity and solving proficiency. The Curriculum Agent effectively generates increasingly difficult problems, progressing from basic geometry (Iter 1) to complex constraint satisfaction tasks (Iter 3). Simultaneously, the Executor Agent0 demonstrates reliable problem-solving capabilities. In the provided example, the agent effectively combines natural language reasoning to identify patterns with the Python code interpreter to verify calculations, validating the model’s ability to handle hybrid reasoning tasks.
## 5 Related Work
Self-Evolving from Zero Data. The paradigm of self-evolution, where LLMs generate their own training data, has gained significant traction (Liu et al., 2024; Dong et al., 2024; Fang et al., 2025; Yang et al., 2025b; Kuba et al., 2025). This approach ranges from dual-agent “Coder-Tester” setups in verifiable domains (Lin et al., 2025; Wang et al., 2025e) to fully autonomous frameworks (Zhao et al., 2025; Huang et al., 2025; Wang et al., 2025d; Liu et al., 2025b; Tao et al., 2024; Zhang et al., 2025a; Wu et al., 2025b; Lu et al., 2025) that learn to generate novel problems from scratch. To guide this learning, many methods use label-free reinforcement learning, relying on heuristic reward signals such as output confidence (Li et al., 2025a) or consistency (Zhang et al., 2025b; Prabhudesai et al., 2025; Zuo et al., 2025; Yu et al., 2025c). However, these systems are critically limited by the model’s inherent knowledge (Han et al., 2025a; Xia et al., 2025), causing curriculum stagnation as tasks rarely surpass the model’s current complexity. Agent0 breaks this cap by integrating an external tool, providing external problem-solving power. However, without external tools, such closed-loop systems risk mode collapse and curriculum stagnation, as they remain bounded by the model’s inherent knowledge. Agent0 breaks this ceiling by integrating an external tool to introduce objective problem-solving power.
Tool-Integrated Reasoning (TIR). Applying Reinforcement Learning (RL) (Jaech et al., 2024; Wang et al., 2025c, b; Zhou et al., 2025c; Wu et al., 2025a; Yang et al., ) to enhance LLM tool-use is a growing field. Many approaches rely on domain-specific data or supervised fine-tuning (Jin et al., 2025; Feng et al., 2025; Li et al., 2025b; Geng et al., 2025; Han et al., 2025b; Su et al., 2025). The more general Zero RL setting, however, is notoriously unstable in multi-turn scenarios. Recent advances in TIR address these challenges through three key dimensions: stability, generalization, and complexity. To stabilize learning dynamics, methods like ASPO (Lin & Xu, 2025) and SimpleTIR (Xue et al., 2025) introduce theoretical guarantees and gradient filtering for void turns. Beyond stability, (Chen et al., 2025) demonstrate the cross-domain transferability of tool-use skills. Finally, to handle complex multi-turn scenarios, advanced techniques optimize for long-horizon planning (Gao et al., 2025; Erdogan et al., 2025), memory management (Yan et al., 2025), and interaction efficiency (Wang et al., 2025a).
## 6 Conclusion
We introduce Agent0, a fully autonomous framework where a curriculum agent and an executor agent co-evolve without any human-curated data. We integrated a code interpreter into the loop, which creates a virtuous cycle: the tool-equipped executor’s improving capabilities drive the curriculum agent to generate progressively harder tasks. Our experiments show that Agent0 significantly enhances the reasoning abilities of base LLMs. It demonstrates a scalable and effective pathway for evolving highly capable agents, breaking the dependency on human-annotated datasets.
## Acknowledgement
We thank Chengsong Huang for helpful discussions. This work is partially supported by the AI for Math Fund from Renaissance Philanthropy. The Authors also acknowledge the National Artificial Intelligence Research Resource (NAIRR) Pilot, Purdue Anvil AI for contributing to this research result.
## References
- Achiam et al. (2023) Achiam, J., Adler, S., Agarwal, S., Ahmad, L., Akkaya, I., Aleman, F. L., Almeida, D., Altenschmidt, J., Altman, S., Anadkat, S., et al. Gpt-4 technical report. arXiv preprint arXiv:2303.08774, 2023.
- Anthropic (2025) Anthropic. Claude code, 2025. URL https://www.claude.com/product/claude-code.
- Bae et al. (2025) Bae, S., Hong, J., Lee, M. Y., Kim, H., Nam, J., and Kwak, D. Online difficulty filtering for reasoning oriented reinforcement learning. arXiv preprint arXiv:2504.03380, 2025.
- Chen et al. (2025) Chen, Z., Yang, J., Xiao, T., Zhou, R., Zhang, L., Xi, X., Shi, X., Wang, W., and Wang, J. Can tool-integrated reinforcement learning generalize across diverse domains? arXiv preprint arXiv:2510.11184, 2025.
- Cheng et al. (2024) Cheng, P., Dai, Y., Hu, T., Xu, H., Zhang, Z., Han, L., Du, N., and Li, X. Self-playing adversarial language game enhances llm reasoning. Advances in Neural Information Processing Systems, 37:126515–126543, 2024.
- Cheng et al. (2025) Cheng, Y., Chen, J., Chen, J., Chen, L., Chen, L., Chen, W., Chen, Z., Geng, S., Li, A., Li, B., Li, B., Li, L., Liu, B., Liu, J., Liu, K., Liu, Q., Liu, S., Liu, S., Liu, T., Liu, T., Liu, Y., Long, R., Mai, J., Ning, G., Peng, Z. Y., Shen, K., Su, J., Su, J., Sun, T., Sun, Y., Tao, Y., Wang, G., Wang, S., Wang, X., Wang, Y., Wang, Z., Xia, J., Xiang, L., Xiao, X., Xiao, Y., Xi, C., Xin, S., Xu, J., Xu, S., Yang, H., Yang, J., Yang, Y., Yuan, J., Zhang, J., Zhang, Y., Zhang, Y., Zheng, S., Zhu, H., and Zhu, M. Fullstack bench: Evaluating llms as full stack coders, 2025. URL https://arxiv.org/abs/2412.00535.
- Cobbe et al. (2021) Cobbe, K., Kosaraju, V., Bavarian, M., Chen, M., Jun, H., Kaiser, L., Plappert, M., Tworek, J., Hilton, J., Nakano, R., et al. Training verifiers to solve math word problems. arXiv preprint arXiv:2110.14168, 2021.
- Dong et al. (2024) Dong, G., Lu, K., Li, C., Xia, T., Yu, B., Zhou, C., and Zhou, J. Self-play with execution feedback: Improving instruction-following capabilities of large language models. arXiv preprint arXiv:2406.13542, 2024.
- Du et al. (2025) Du, X., Yao, Y., Ma, K., Wang, B., Zheng, T., Zhu, K., Liu, M., Liang, Y., Jin, X., Wei, Z., et al. Supergpqa: Scaling llm evaluation across 285 graduate disciplines. arXiv preprint arXiv:2502.14739, 2025.
- Erdogan et al. (2025) Erdogan, L. E., Lee, N., Kim, S., Moon, S., Furuta, H., Anumanchipalli, G., Keutzer, K., and Gholami, A. Plan-and-act: Improving planning of agents for long-horizon tasks. arXiv preprint arXiv:2503.09572, 2025.
- Fang et al. (2025) Fang, W., Liu, S., Zhou, Y., Zhang, K., Zheng, T., Chen, K., Song, M., and Tao, D. Serl: Self-play reinforcement learning for large language models with limited data. arXiv preprint arXiv:2505.20347, 2025.
- Feng et al. (2025) Feng, J., Huang, S., Qu, X., Zhang, G., Qin, Y., Zhong, B., Jiang, C., Chi, J., and Zhong, W. Retool: Reinforcement learning for strategic tool use in llms. arXiv preprint arXiv:2504.11536, 2025.
- Gao et al. (2025) Gao, J., Fu, W., Xie, M., Xu, S., He, C., Mei, Z., Zhu, B., and Wu, Y. Beyond ten turns: Unlocking long-horizon agentic search with large-scale asynchronous rl. arXiv preprint arXiv:2508.07976, 2025.
- Geng et al. (2025) Geng, X., Xia, P., Zhang, Z., Wang, X., Wang, Q., Ding, R., Wang, C., Wu, J., Zhao, Y., Li, K., et al. Webwatcher: Breaking new frontier of vision-language deep research agent. arXiv preprint arXiv:2508.05748, 2025.
- Google (2024) Google. Try deep research and our new experimental model in gemini, your ai assistant, 2024. URL https://blog.google/products/gemini/google-gemini-deep-research/.
- Han et al. (2025a) Han, S., Liu, J., Su, Y., Duan, W., Liu, X., Xie, C., Bansal, M., Ding, M., Zhang, L., and Yao, H. Alignment tipping process: How self-evolution pushes llm agents off the rails. arXiv preprint arXiv:2510.04860, 2025a.
- Han et al. (2025b) Han, S., Xia, P., Zhang, R., Sun, T., Li, Y., Zhu, H., and Yao, H. Mdocagent: A multi-modal multi-agent framework for document understanding. arXiv preprint arXiv:2503.13964, 2025b.
- He et al. (2024) He, C., Luo, R., Bai, Y., Hu, S., Thai, Z. L., Shen, J., Hu, J., Han, X., Huang, Y., Zhang, Y., et al. Olympiadbench: A challenging benchmark for promoting agi with olympiad-level bilingual multimodal scientific problems. arXiv preprint arXiv:2402.14008, 2024.
- Hendrycks et al. (2020) Hendrycks, D., Burns, C., Basart, S., Zou, A., Mazeika, M., Song, D., and Steinhardt, J. Measuring massive multitask language understanding. arXiv preprint arXiv:2009.03300, 2020.
- Hendrycks et al. (2021) Hendrycks, D., Burns, C., Kadavath, S., Arora, A., Basart, S., Tang, E., Song, D., and Steinhardt, J. Measuring mathematical problem solving with the math dataset. arXiv preprint arXiv:2103.03874, 2021.
- Huang et al. (2025) Huang, C., Yu, W., Wang, X., Zhang, H., Li, Z., Li, R., Huang, J., Mi, H., and Yu, D. R-zero: Self-evolving reasoning llm from zero data. 2025. URL https://arxiv.org/abs/2508.05004.
- Jaech et al. (2024) Jaech, A., Kalai, A., Lerer, A., Richardson, A., El-Kishky, A., Low, A., Helyar, A., Madry, A., Beutel, A., Carney, A., et al. Openai o1 system card. arXiv preprint arXiv:2412.16720, 2024.
- Jiang et al. (2025) Jiang, D., Lu, Y., Li, Z., Lyu, Z., Nie, P., Wang, H., Su, A., Chen, H., Zou, K., Du, C., et al. Verltool: Towards holistic agentic reinforcement learning with tool use. arXiv preprint arXiv:2509.01055, 2025.
- Jimenez et al. (2023) Jimenez, C. E., Yang, J., Wettig, A., Yao, S., Pei, K., Press, O., and Narasimhan, K. Swe-bench: Can language models resolve real-world github issues? arXiv preprint arXiv:2310.06770, 2023.
- Jin et al. (2025) Jin, B., Zeng, H., Yue, Z., Yoon, J., Arik, S., Wang, D., Zamani, H., and Han, J. Search-r1: Training llms to reason and leverage search engines with reinforcement learning. arXiv preprint arXiv:2503.09516, 2025.
- Kazemi et al. (2025) Kazemi, M., Fatemi, B., Bansal, H., Palowitch, J., Anastasiou, C., Mehta, S. V., Jain, L. K., Aglietti, V., Jindal, D., Chen, P., et al. Big-bench extra hard. arXiv preprint arXiv:2502.19187, 2025.
- Kuba et al. (2025) Kuba, J. G., Gu, M., Ma, Q., Tian, Y., and Mohan, V. Language self-play for data-free training. arXiv preprint arXiv:2509.07414, 2025.
- Kwon et al. (2023) Kwon, W., Li, Z., Zhuang, S., Sheng, Y., Zheng, L., Yu, C. H., Gonzalez, J. E., Zhang, H., and Stoica, I. Efficient memory management for large language model serving with pagedattention. In Proceedings of the ACM SIGOPS 29th Symposium on Operating Systems Principles, 2023.
- Lewkowycz et al. (2022) Lewkowycz, A., Andreassen, A., Dohan, D., Dyer, E., Michalewski, H., Ramasesh, V., Slone, A., Anil, C., Schlag, I., Gutman-Solo, T., et al. Solving quantitative reasoning problems with language models. Advances in neural information processing systems, 35:3843–3857, 2022.
- Li et al. (2025a) Li, P., Skripkin, M., Zubrey, A., Kuznetsov, A., and Oseledets, I. Confidence is all you need: Few-shot rl fine-tuning of language models. arXiv preprint arXiv:2506.06395, 2025a.
- Li et al. (2025b) Li, X., Zou, H., and Liu, P. Torl: Scaling tool-integrated rl. arXiv preprint arXiv:2503.23383, 2025b.
- Li et al. (2025c) Li, Y., Shen, X., Yao, X., Ding, X., Miao, Y., Krishnan, R., and Padman, R. Beyond single-turn: A survey on multi-turn interactions with large language models. arXiv preprint arXiv:2504.04717, 2025c.
- Lin & Xu (2025) Lin, H. and Xu, Z. Understanding tool-integrated reasoning. arXiv preprint arXiv:2508.19201, 2025.
- Lin et al. (2025) Lin, Z., Shen, S., Shang, J., Weston, J., and Nie, Y. Learning to solve and verify: A self-play framework for code and test generation. arXiv preprint arXiv:2502.14948, 2025.
- Liu et al. (2025a) Liu, B., Guertler, L., Yu, S., Liu, Z., Qi, P., Balcells, D., Liu, M., Tan, C., Shi, W., Lin, M., Lee, W. S., and Jaques, N. Spiral: Self-play on zero-sum games incentivizes reasoning via multi-agent multi-turn reinforcement learning. arXiv preprint arXiv:2506.24119, 2025a.
- Liu et al. (2025b) Liu, B., Jin, C., Kim, S., Yuan, W., Zhao, W., Kulikov, I., Li, X., Sukhbaatar, S., Lanchantin, J., and Weston, J. Spice: Self-play in corpus environments improves reasoning. arXiv preprint arXiv:2510.24684, 2025b.
- Liu et al. (2024) Liu, Y., Sun, P., and Li, H. Large language models as agents in two-player games. arXiv preprint arXiv:2402.08078, 2024.
- Lu et al. (2025) Lu, H., Wen, Y., Cheng, P., Ding, R., Xu, H., Guo, J., Wang, C., Chen, H., Jiang, X., and Jiang, G. Search self-play: Pushing the frontier of agent capability without supervision. arXiv preprint arXiv:2510.18821, 2025.
- OpenAI (2025) OpenAI. Openai deep research system card, 2025. URL https://openai.com/index/introducing-deep-research/.
- Ouyang et al. (2022) Ouyang, L., Wu, J., Jiang, X., Almeida, D., Wainwright, C., Mishkin, P., Zhang, C., Agarwal, S., Slama, K., Ray, A., et al. Training language models to follow instructions with human feedback. Advances in neural information processing systems, 35:27730–27744, 2022.
- Papineni et al. (2002) Papineni, K., Roukos, S., Ward, T., and Zhu, W.-J. Bleu: a method for automatic evaluation of machine translation. In Proceedings of the 40th annual meeting of the Association for Computational Linguistics, pp. 311–318, 2002.
- Prabhudesai et al. (2025) Prabhudesai, M., Chen, L., Ippoliti, A., Fragkiadaki, K., Liu, H., and Pathak, D. Maximizing confidence alone improves reasoning. arXiv preprint arXiv:2505.22660, 2025.
- Qiu et al. (2025a) Qiu, J., Qi, X., Wang, H., Juan, X., Wang, Y., Zhao, Z., Geng, J., Guo, J., Li, P., Shi, J., et al. Alita-g: Self-evolving generative agent for agent generation. arXiv preprint arXiv:2510.23601, 2025a.
- Qiu et al. (2025b) Qiu, J., Qi, X., Zhang, T., Juan, X., Guo, J., Lu, Y., Wang, Y., Yao, Z., Ren, Q., Jiang, X., et al. Alita: Generalist agent enabling scalable agentic reasoning with minimal predefinition and maximal self-evolution. arXiv preprint arXiv:2505.20286, 2025b.
- Rein et al. (2024) Rein, D., Hou, B. L., Stickland, A. C., Petty, J., Pang, R. Y., Dirani, J., Michael, J., and Bowman, S. R. Gpqa: A graduate-level google-proof q&a benchmark. In First Conference on Language Modeling, 2024.
- Schulman et al. (2017) Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and Klimov, O. Proximal policy optimization algorithms. ArXiv preprint, abs/1707.06347, 2017. URL https://arxiv.org/abs/1707.06347.
- Shao et al. (2024) Shao, Z., Wang, P., Zhu, Q., Xu, R., Song, J., Bi, X., Zhang, H., Zhang, M., Li, Y., Wu, Y., et al. Deepseekmath: Pushing the limits of mathematical reasoning in open language models. arXiv preprint arXiv:2402.03300, 2024.
- Sheng et al. (2025) Sheng, G., Zhang, C., Ye, Z., Wu, X., Zhang, W., Zhang, R., Peng, Y., Lin, H., and Wu, C. Hybridflow: A flexible and efficient rlhf framework. In Proceedings of the Twentieth European Conference on Computer Systems, pp. 1279–1297, 2025.
- Shi et al. (2025) Shi, T., Wu, Y., Song, L., Zhou, T., and Zhao, J. Efficient reinforcement finetuning via adaptive curriculum learning. arXiv preprint arXiv:2504.05520, 2025.
- Srivastava et al. (2023) Srivastava, A., Rastogi, A., Rao, A., Shoeb, A. A. M., Abid, A., Fisch, A., Brown, A. R., Santoro, A., Gupta, A., Garriga-Alonso, A., et al. Beyond the imitation game: Quantifying and extrapolating the capabilities of language models. Transactions on machine learning research, 2023.
- Su et al. (2025) Su, Z., Xia, P., Guo, H., Liu, Z., Ma, Y., Qu, X., Liu, J., Li, Y., Zeng, K., Yang, Z., et al. Thinking with images for multimodal reasoning: Foundations, methods, and future frontiers. arXiv preprint arXiv:2506.23918, 2025.
- Tang et al. (2025) Tang, X., Qin, T., Peng, T., Zhou, Z., Shao, D., Du, T., Wei, X., Xia, P., Wu, F., Zhu, H., et al. Agent kb: Leveraging cross-domain experience for agentic problem solving. arXiv preprint arXiv:2507.06229, 2025.
- Tao et al. (2024) Tao, Z., Lin, T.-E., Chen, X., Li, H., Wu, Y., Li, Y., Jin, Z., Huang, F., Tao, D., and Zhou, J. A survey on self-evolution of large language models. arXiv preprint arXiv:2404.14387, 2024.
- Team et al. (2025) Team, T. D., Li, B., Zhang, B., Zhang, D., Huang, F., Li, G., Chen, G., Yin, H., Wu, J., Zhou, J., et al. Tongyi deepresearch technical report. arXiv preprint arXiv:2510.24701, 2025.
- Tu et al. (2025) Tu, A., Xuan, W., Qi, H., Huang, X., Zeng, Q., Talaei, S., Xiao, Y., Xia, P., Tang, X., Zhuang, Y., et al. Position: The hidden costs and measurement gaps of reinforcement learning with verifiable rewards. arXiv preprint arXiv:2509.21882, 2025.
- Wang et al. (2025a) Wang, H., Qian, C., Zhong, W., Chen, X., Qiu, J., Huang, S., Jin, B., Wang, M., Wong, K.-F., and Ji, H. Otc: Optimal tool calls via reinforcement learning. arXiv e-prints, pp. arXiv–2504, 2025a.
- Wang et al. (2025b) Wang, H., Que, H., Xu, Q., Liu, M., Zhou, W., Feng, J., Zhong, W., Ye, W., Yang, T., Huang, W., et al. Reverse-engineered reasoning for open-ended generation. arXiv preprint arXiv:2509.06160, 2025b.
- Wang et al. (2025c) Wang, H., Xu, Q., Liu, C., Wu, J., Lin, F., and Chen, W. Emergent hierarchical reasoning in llms through reinforcement learning. arXiv preprint arXiv:2509.03646, 2025c.
- Wang et al. (2025d) Wang, S., Jiao, Z., Zhang, Z., Peng, Y., Ze, X., Yang, B., Wang, W., Wei, H., and Zhang, L. Socratic-zero: Bootstrapping reasoning via data-free agent co-evolution. arXiv preprint arXiv:2509.24726, 2025d.
- Wang et al. (2024a) Wang, X., Li, B., Song, Y., Xu, F. F., Tang, X., Zhuge, M., Pan, J., Song, Y., Li, B., Singh, J., et al. Openhands: An open platform for ai software developers as generalist agents. arXiv preprint arXiv:2407.16741, 2024a.
- Wang et al. (2024b) Wang, Y., Ma, X., Zhang, G., Ni, Y., Chandra, A., Guo, S., Ren, W., Arulraj, A., He, X., Jiang, Z., et al. Mmlu-pro: A more robust and challenging multi-task language understanding benchmark. Advances in Neural Information Processing Systems, 37:95266–95290, 2024b.
- Wang et al. (2025e) Wang, Y., Yang, L., Tian, Y., Shen, K., and Wang, M. Co-evolving llm coder and unit tester via reinforcement learning. arXiv preprint arXiv:2506.03136, 2025e.
- Wu et al. (2025a) Wu, F., Huang, X., Xuan, W., Zhang, Z., Xiao, Y., Wan, G., Li, X., Hu, B., Xia, P., Leskovec, J., et al. Multiplayer nash preference optimization. arXiv preprint arXiv:2509.23102, 2025a.
- Wu et al. (2025b) Wu, R., Wang, X., Mei, J., Cai, P., Fu, D., Yang, C., Wen, L., Yang, X., Shen, Y., Wang, Y., et al. Evolver: Self-evolving llm agents through an experience-driven lifecycle. arXiv preprint arXiv:2510.16079, 2025b.
- Xia et al. (2025) Xia, P., Wang, J., Peng, Y., Zeng, K., Wu, X., Tang, X., Zhu, H., Li, Y., Liu, S., Lu, Y., et al. Mmedagent-rl: Optimizing multi-agent collaboration for multimodal medical reasoning. arXiv preprint arXiv:2506.00555, 2025.
- Xue et al. (2025) Xue, Z., Zheng, L., Liu, Q., Li, Y., Zheng, X., Ma, Z., and An, B. Simpletir: End-to-end reinforcement learning for multi-turn tool-integrated reasoning. arXiv preprint arXiv:2509.02479, 2025.
- Yan et al. (2025) Yan, S., Yang, X., Huang, Z., Nie, E., Ding, Z., Li, Z., Ma, X., Kersting, K., Pan, J. Z., Schütze, H., et al. Memory-r1: Enhancing large language model agents to manage and utilize memories via reinforcement learning. arXiv preprint arXiv:2508.19828, 2025.
- Yang et al. (2025a) Yang, A., Li, A., Yang, B., Zhang, B., Hui, B., Zheng, B., Yu, B., Gao, C., Huang, C., Lv, C., et al. Qwen3 technical report. arXiv preprint arXiv:2505.09388, 2025a.
- (69) Yang, X., Han, J., Bommasani, R., Luo, J., Qu, W., Zhou, W., Bibi, A., Wang, X., Yoon, J., Stengel-Eskin, E., et al. Reliable and responsible foundation models. Transactions on Machine Learning Research.
- Yang et al. (2025b) Yang, Z., Shen, W., Chen, R., Li, C., Wan, F., Yan, M., Quan, X., and Huang, F. Spell: Self-play reinforcement learning for evolving long-context language models. arXiv preprint arXiv:2509.23863, 2025b.
- Yu et al. (2025a) Yu, H., Chen, T., Feng, J., Chen, J., Dai, W., Yu, Q., Zhang, Y.-Q., Ma, W.-Y., Liu, J., Wang, M., et al. Memagent: Reshaping long-context llm with multi-conv rl-based memory agent. arXiv preprint arXiv:2507.02259, 2025a.
- Yu et al. (2025b) Yu, Q., Zhang, Z., Zhu, R., Yuan, Y., Zuo, X., Yue, Y., Dai, W., Fan, T., Liu, G., Liu, L., et al. Dapo: An open-source llm reinforcement learning system at scale. arXiv preprint arXiv:2503.14476, 2025b.
- Yu et al. (2025c) Yu, Z., Su, W., Tao, L., Wang, H., Singh, A., Yu, H., Wang, J., Gao, H., Yuan, W., Weston, J., et al. Restrain: From spurious votes to signals–self-driven rl with self-penalization. arXiv preprint arXiv:2510.02172, 2025c.
- Yue et al. (2025) Yue, Y., Chen, Z., Lu, R., Zhao, A., Wang, Z., Song, S., and Huang, G. Does reinforcement learning really incentivize reasoning capacity in llms beyond the base model? arXiv preprint arXiv:2504.13837, 2025.
- Zhai et al. (2025) Zhai, Y., Tao, S., Chen, C., Zou, A., Chen, Z., Fu, Q., Mai, S., Yu, L., Deng, J., Cao, Z., et al. Agentevolver: Towards efficient self-evolving agent system. arXiv preprint arXiv:2511.10395, 2025.
- Zhang et al. (2025a) Zhang, D.-C., Zhao, Y., Wu, J., Zhang, L., Li, B., Yin, W., Jiang, Y., Li, Y.-F., Tu, K., Xie, P., et al. Evolvesearch: An iterative self-evolving search agent. In Proceedings of the 2025 Conference on Empirical Methods in Natural Language Processing, pp. 13134–13147, 2025a.
- Zhang et al. (2025b) Zhang, K., Yao, Q., Liu, S., Wang, Y., Lai, B., Ye, J., Song, M., and Tao, D. Consistent paths lead to truth: Self-rewarding reinforcement learning for llm reasoning. arXiv preprint arXiv:2506.08745, 2025b.
- Zhang et al. (2025c) Zhang, K., Zuo, Y., He, B., Sun, Y., Liu, R., Jiang, C., Fan, Y., Tian, K., Jia, G., Li, P., et al. A survey of reinforcement learning for large reasoning models. arXiv preprint arXiv:2509.08827, 2025c.
- Zhao et al. (2025) Zhao, A., Wu, Y., Yue, Y., Wu, T., Xu, Q., Yue, Y., Lin, M., Wang, S., Wu, Q., Zheng, Z., and Huang, G. Absolute zero: Reinforced self-play reasoning with zero data, 2025. URL https://arxiv.org/abs/2505.03335.
- Zhou et al. (2025a) Zhou, Y., Levine, S., Weston, J., Li, X., and Sukhbaatar, S. Self-challenging language model agents. arXiv preprint arXiv:2506.01716, 2025a.
- Zhou et al. (2025b) Zhou, Y., Liang, Z., Liu, H., Yu, W., Panaganti, K., Song, L., Yu, D., Zhang, X., Mi, H., and Yu, D. Evolving language models without labels: Majority drives selection, novelty promotes variation. arXiv preprint arXiv:2509.15194, 2025b.
- Zhou et al. (2025c) Zhou, Y., Wang, Z., Wang, T., Xing, S., Xia, P., Li, B., Zheng, K., Zhang, Z., Chen, Z., Zheng, W., et al. Anyprefer: An agentic framework for preference data synthesis. arXiv preprint arXiv:2504.19276, 2025c.
- Zuo et al. (2025) Zuo, Y., Zhang, K., Sheng, L., Qu, S., Cui, G., Zhu, X., Li, H., Zhang, Y., Long, X., Hua, E., et al. Ttrl: Test-time reinforcement learning. arXiv preprint arXiv:2504.16084, 2025.
## Appendix
## Appendix A Experimental Details
### A.1 Hyperparameter Settings
Executor Agent Training
- Global Batch Size: 128
- Learning Rate: $1\times 10^{-6}$
- Weight Decay: $1\times 10^{-2}$
- KL Penalty Coefficient ( $\lambda_{KL}$ ): $1\times 10^{-2}$
- Max Steps: 40
- Number of Rollouts: 16
- Rollout Temperature: 1.0
- Rollout Top-p: 0.99
Curriculum Agent Training
- Global Batch Size: 128
- Learning Rate: $1\times 10^{-6}$
- Weight Decay: $1\times 10^{-2}$
- KL Penalty Coefficient ( $\lambda_{KL}$ ): $1\times 10^{-2}$
- Max Steps: 5
- Number of Rollouts: 4
- Rollout Temperature: 1.0
- Rollout Top-p: 0.99
### A.2 Prompt
This section presents the prompt templates used for the executor and curriculum agent, and judge prompt in Table 6, Table 7 and Table 8.
Table 6: Prompt template used for executor agent.
System Prompt: A conversation between User and Assistant. The user asks a question, and the Assistant solves it. The assistant first thinks about the reasoning process in the mind and then provides the user with the answer. User: Please integrate natural language reasoning with programs to solve the problem above. If you want to run any python code, write code in the python markdown code block and the execution will be appended in an output code block like ‘‘‘python you code here‘‘‘ ‘‘‘output result here‘‘‘. Please put your final answer within boxed{}. User Prompt: {problem}
Table 7: Prompt template used for curriculum agent.
System Prompt: You are an expert competition-math problem setter. FIRST, in your private scratch-pad, think step-by-step to design a brand-new, non-trivial problem. The problem could come from any field of mathematics, including but not limited to algebra, geometry, number theory, combinatorics, prealgebra, probability, statistics, and calculus. Aim for a difficulty such that fewer than 30% of advanced high-school students could solve it. Avoid re-using textbook cliches or famous contest problems. THEN, without revealing any of your private thoughts, output exactly the following two blocks: <question> The full problem statement on one or more lines </question> boxed{final answer} Do NOT output anything else—no explanations, no extra markup. User Prompt: Generate one new, challenging reasoning question now. Remember to format the output exactly as instructed.
Table 8: Prompt template used for judging. We use the GPT-4o (Achiam et al., 2023) as the judge model (temperature: 0.1).
System Prompt: You are a math answer checker. User Prompt: Hi, there is an answer: {answer}, and the ground truth answer is: {response}, please check whether the answer is correct or not, and return the **only** Yes or No.
### A.3 Sandbox Configuration
We integrated a Python-based code execution sandbox (Cheng et al., 2025) to enable verification and algorithmic reasoning. The system comprises two core components: a Multi-Turn Interaction Protocol and a Distributed Execution Orchestrator, supported by a robust infrastructure.
Multi-Turn Interaction Protocol. We employ a “stop-and-go” strategy to facilitate multi-step reasoning: The model is instructed to generate reasoning followed by executable Python code within markdown delimiters. Upon detecting a code block via regex, generation halts. The code is extracted and run in an isolated sandbox, capturing stdout or stderr. Execution results are appended to the conversation history. The model then interprets these results to derive a final answer formatted in LaTeX boxed notation ( $\text{\\ boxed}\{\cdots\}$ ).
Distributed Execution Orchestrator. To manage parallel candidate generation (e.g., $N=10$ ), we implemented a load-balancing mechanism: Execution is decoupled into isolated worker nodes to prevent interference with the main inference server. A thread-safe Round-Robin scheduler distributes requests across nodes. A ThreadPoolExecutor manages asynchronous calls, preventing main loop blocking. The system robustly handles network timeouts and failures, feeding error messages back to the model for potential self-correction.
Infrastructure. Built on Flask and vLLM (Kwon et al., 2023), the system ensures high throughput. To maintain stability, a background thread performs low-priority tensor operations during idle periods, preventing GPU deep sleep and ensuring consistent latency.
## Appendix B Overview of the Baselines
- Base Model: The pre-trained base model without any fine-tuning.
- Base Model w/ tool: The base model evaluated in a zero-shot setting, but given access to the code interpreter.
- R-Zero (Huang et al., 2025): A self-evolving framework that operates from zero data, but does not utilize external tools.
- Absolute Zero (Zhao et al., 2025): A self-play method that does use a code executor for verification, representing a strong tool-aware baseline.
- SPIRAL (Liu et al., 2025a): A self-play method based on zero-sum games and multi-turn interactions.
- Socratic-Zero (Wang et al., 2025d): A strong baseline representing methods that leverage external proprietary models for reasoning assistance.
## Appendix C Evaluation Benchmarks
- AMC: A collection of problems from standard American middle and high school math competitions, serving as a foundational benchmark for pre-collegiate mathematical reasoning.
- Minerva (Lewkowycz et al., 2022): The dataset evaluates the model’s ability to handle formal scientific notation and solve complex STEM-related questions.
- MATH (Hendrycks et al., 2021): A comprehensive dataset of challenging high school competition problems across various subfields (e.g., algebra, geometry), requiring complex heuristic search and multi-step derivation.
- GSM8K (Cobbe et al., 2021): A classic benchmark consisting of high-quality grade school math word problems that test the model’s ability to perform multi-step logic using basic arithmetic operations.
- Olympiad-Bench (He et al., 2024): An advanced benchmark aggregating extremely difficult problems from Chinese and International Mathematical Olympiads, designed to probe the upper limits of LLM reasoning capabilities.
- AIME24 & AIME25: These datasets comprise problems from the 2024 and 2025 American Invitational Mathematics Examinations, serving as a rigorous test of advanced problem-solving on recent, likely uncontaminated data.
- SuperGPQA (Du et al., 2025): An evolution of the GPQA dataset (Rein et al., 2024), this benchmark features difficult graduate-level questions across scientific domains that are challenging even for experts, specifically designed to minimize data contamination and retrieval shortcuts.
- MMLU-Pro (Wang et al., 2024b): An enhanced version of the MMLU benchmark (Hendrycks et al., 2020) that introduces harder questions, increased options, and more complex reasoning requirements to better differentiate between top-tier language models.
- BBEH (Kazemi et al., 2025): A selected subset of challenging tasks from the Big-Bench suite (Srivastava et al., 2023), focusing on areas where language models traditionally struggle, such as symbolic manipulation, logical deduction, and algorithmic tracking.
## Appendix D Additional Results and Analysis
### D.1 The Impact of the Number of Turns on Performance
We investigate the impact of the conversation length on model performance by increasing the interaction turns from 1 to 4 during the curriculum generation phase. As shown in Table 9, extending the number of turns yields significant benefits. Compared to the single-turn baseline, the 4-turn setting improves the executor’s overall performance by 3.4%, with specific gains of 3% on mathematical benchmarks and 2.6% on general domain tasks. This performance boost can be attributed to the increased complexity of the curriculum. Multi-turn interactions encourage the curriculum agent to generate tasks with longer context dependencies and progressive difficulty. Consequently, the executor is forced to enhance its capability to maintain logical consistency and reasoning over extended horizons, rather than relying on simple pattern matching.
Table 9: Ablation study on the number of interaction turns. Increasing turns from 1 to 4 leads to consistent performance gains across all domains.
| 1 2 3 | 35.5 35.8 36.1 | 50.4 50.7 51.2 | 30.8 31.1 31.3 |
| --- | --- | --- | --- |
| 4 | 36.7 | 51.9 | 31.6 |
### D.2 Detailed Results
For a more detailed analysis, we report the complete results of the 3-iteration experiments in Table 10 and Table 11. These tables provide a comprehensive breakdown of the agent’s performance across all individual benchmarks, further validating the effectiveness and robustness of Agent0.
Table 10: Comprehensive results on mathematical reasoning benchmarks. The peak performance achieved during each model’s training process is highlighted in bold.
| Base Model | ✗ | ✗ | 42.6 | 45.7 | 38.2 | 68.2 | 87.8 | 41.0 | 6.15 | 10.9 |
| --- | --- | --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Qwen3-4B-Base | | | | | | | | | | |
| + Agent0 (Iter 1) | ✓ | ✗ | 51.9 | 59.8 | 55.0 | 79.9 | 92.6 | 46.1 | 13.0 | 16.8 |
| + Agent0 (Iter 2) | ✓ | ✗ | 52.2 | 60.0 | 55.1 | 80.2 | 92.5 | 46.5 | 13.8 | 17.1 |
| + Agent0 (Iter 3) | ✓ | ✗ | 52.5 | 60.6 | 55.6 | 80.5 | 92.6 | 46.7 | 14.1 | 17.4 |
| Qwen3-8B-Base | | | | | | | | | | |
| Base Model | ✗ | ✗ | 49.2 | 52.0 | 50.0 | 78.0 | 89.1 | 44.7 | 16.7 | 13.9 |
| + Agent0 (Iter 1) | ✓ | ✗ | 55.1 | 57.3 | 59.0 | 81.6 | 93.9 | 48.4 | 20.9 | 24.9 |
| + Agent0 (Iter 2) | ✓ | ✗ | 56.5 | 59.2 | 60.1 | 81.9 | 94.0 | 51.2 | 22.9 | 26.1 |
| + Agent0 (Iter 3) | ✓ | ✗ | 58.2 | 62.4 | 61.3 | 82.4 | 94.5 | 54.0 | 24.8 | 28.0 |
Table 11: Results on general-domain reasoning benchmarks.
| Base Model | ✗ | ✗ | 27.1 | 42.6 | 20.9 | 37.4 | 7.57 |
| --- | --- | --- | --- | --- | --- | --- | --- |
| Qwen3-4B-Base | | | | | | | |
| + Agent0 (Iter 1) | ✓ | ✗ | 36.7 | 51.9 | 28.9 | 55.1 | 10.7 |
| + Agent0 (Iter 2) | ✓ | ✗ | 36.9 | 52.2 | 29.3 | 55.3 | 11.0 |
| + Agent0 (Iter 3) | ✓ | ✗ | 37.6 | 52.5 | 29.9 | 55.9 | 12.0 |
| Qwen3-8B-Base | | | | | | | |
| Base Model | ✗ | ✗ | 34.5 | 49.2 | 28.3 | 51.8 | 8.6 |
| + Agent0 (Iter 1) | ✓ | ✗ | 40.7 | 55.1 | 32.5 | 62.2 | 13.0 |
| + Agent0 (Iter 2) | ✓ | ✗ | 41.3 | 56.5 | 32.5 | 62.4 | 13.6 |
| + Agent0 (Iter 3) | ✓ | ✗ | 42.1 | 58.2 | 33.0 | 63.4 | 13.7 |
## Appendix E Case Analysis
To provide qualitative evidence of the model’s evolution, Table 12, Table 13, Table 14, Table 15, Table 16, Table 17, Table 18, Table 19, and Table 20 through 9 present three representative questions generated at each stage from Iteration 1 to Iteration 3. We observe a clear progression in difficulty: while the initial iteration features relatively straightforward queries, the tasks in Iteration 3 evolve into highly complex, multi-step problems requiring deep reasoning. This escalation is driven by the co-evolutionary dynamic, where the Curriculum Agent, incentivized to maximize the Executor’s learning signal, must continuously push the difficulty frontier to challenge the Executor’s expanding proficiency, thereby effectively preventing learning stagnation.
Table 12: Sampled questions generated by Curriculum Agent (Iter 1).
Questions from Curriculum Agent Let $S$ be the set of all positive integers $n$ for which the polynomial $P(x)=x^{3}-2023x^{2}+nx-1$ has three distinct positive integer roots. Find the sum of all elements in $S$ .
Table 13: Sampled questions generated by Curriculum Agent (Iter 1).
Questions from Curriculum Agent In a triangle $ABC$ with side lengths $a$ , $b$ , and $c$ (where $a=BC$ , $b=CA$ , and $c=AB$ ), let the area be $K$ . If the incircle of the triangle touches $BC$ , $CA$ , and $AB$ at $D$ , $E$ , and $F$ respectively, and the lengths of $BD$ , $CE$ , and $AF$ are $x$ , $y$ , and $z$ respectively, prove that $x^{2}+y^{2}+z^{2}\geq\frac{3K}{2}$ .
Table 14: Sampled questions generated by Curriculum Agent (Iter 1).
Questions from Curriculum Agent What is the minimum number of points inside a square with side length 1 that are needed to ensure that at least two of the points are at most 0.25 units apart from each other?
Table 15: Sampled questions generated by Curriculum Agent (Iter 2).
Questions from Curriculum Agent On a $9\times 9$ chessboard, initially one cell is black. In each move, you can choose a white cell that has at least one black cell in the same row or column and invert the color of that chosen cell from white to black. Determine the minimum number of moves required to turn the entire chessboard into a black board.
Table 16: Sampled questions generated by Curriculum Agent (Iter 2).
Questions from Curriculum Agent Let $S=\{1,2,3,\ldots,100\}$ . A subset $A$ of $S$ is called *good* if for any $x,y\in A$ (with $x\neq y$ ), the sum $x+y$ is not a perfect square. Find the maximum possible size of a *good* subset of $S$ .
Table 17: Sampled questions generated by Curriculum Agent (Iter 2).
Questions from Curriculum Agent In the land of Polytopia, each city is represented by a unique point on a large spherical map. The king decides to create a new city at a special point on this sphere. To determine the location, he uses a sequence of operations on the coordinates of existing cities. The map is represented by a sphere where the equation $x^{2}+y^{2}+z^{2}=1$ holds for any point $(x,y,z)$ representing a city. The king chooses two existing cities, A and B, with coordinates $(a_{1},a_{2},a_{3})$ and $(b_{1},b_{2},b_{3})$ , respectively. He defines a new city C with coordinates calculated by the formula: $c_{i}=\frac{a_{i}^{2}+b_{i}^{2}+a_{i}b_{i}\cdot(1+a_{1}b_{1}+a_{2}b_{2}+a_{3}b_{3})}{1+a_{1}^{2}+a_{2}^{2}+a_{3}^{2}+b_{1}^{2}+b_{2}^{2}+b_{3}^{2}+(a_{1}b_{1}+a_{2}b_{2}+a_{3}b_{3})^{2}}$ for $i=1,2,3$ . Given that the coordinates of city A are $\left(\frac{1}{2},\frac{1}{2},\frac{\sqrt{2}}{2}\right)$ and the coordinates of city B are $\left(-\frac{1}{2},\frac{1}{2},\frac{\sqrt{2}}{2}\right)$ , find the coordinates of the new city C.
Table 18: Sampled questions generated by Curriculum Agent (Iter 3).
Questions from Curriculum Agent A sequence of positive integers $a_{1},a_{2},a_{3},\ldots,a_{2024}$ is defined such that for each $n\geq 1$ , the number $a_{n+1}$ is determined by the rule $a_{n+1}=a_{n}+\lfloor\sqrt{a_{n}}\rfloor$ , starting with $a_{1}=1$ . Find the remainder when $a_{2024}$ is divided by 1000.
Table 19: Sampled questions generated by Curriculum Agent (Iter 3).
Questions from Curriculum Agent In a knockout tournament with $2^{n}$ players, where $n$ is a positive integer, each match eliminates one player. The tournament is structured such that each round halves the number of players. What is the minimum number of matches that must be played to determine the champion if, for each round, the number of matches played is a Fibonacci number?
Table 20: Sampled questions generated by Curriculum Agent (Iter 3).
Questions from Curriculum Agent A circle is divided into 2023 congruent arcs. The endpoints of one arc are colored red and blue. If two points that are diametrically opposite are both colored red, what is the probability that the two endpoints of the arc directly adjacent to the red endpoints are both blue? Express your answer as a common fraction.