# Kimi K2.5: Visual Agentic Intelligence
**Authors**: Kimi Team
Abstract
We introduce Kimi K2.5, an open-source multimodal agentic model designed to advance general agentic intelligence. K2.5 emphasizes the joint optimization of text and vision so that two modalities enhance each other. This includes a series of techniques such as joint text-vision pre-training, zero-vision SFT, and joint text-vision reinforcement learning. Building on this multimodal foundation, K2.5 introduces Agent Swarm, a self-directed parallel agent orchestration framework that dynamically decomposes complex tasks into heterogeneous sub-problems and executes them concurrently. Extensive evaluations show that Kimi K2.5 achieves state-of-the-art results across various domains including coding, vision, reasoning, and agentic tasks. Agent Swarm also reduces latency by up to $4.5×$ over single-agent baselines. We release the post-trained Kimi K2.5 model checkpoint https://huggingface.co/moonshotai/Kimi-K2.5 to facilitate future research and real-world applications of agentic intelligence.
<details>
<summary>figures/k25-main-result.png Details</summary>
### Visual Description
\n
## Bar Chart: Multimodal Model Performance Comparison
### Overview
This image presents a bar chart comparing the performance of four large multimodal models – Kimi K2.5, GPT-5.2 (xhigh), Claude Opus 4.5, and Gemini 3 Pro – across ten different benchmark tasks. The performance metric is a percentile score (%). Each model's performance on each task is represented by a bar divided into four segments, each with a different color and icon, presumably representing different evaluation criteria or sub-scores.
### Components/Axes
* **X-axis:** Represents the ten benchmark tasks:
1. Agents Humanity's Last Exam (Full)
2. Agents BrowseComp
3. Agents DeepSearchQA
4. Coding SWE-bench Verified
5. Coding SWE-bench Multilingual
6. Image MMMU Pro
7. Image MathVision
8. Image OmniDocBench 1.5*
9. Video VideoMMU
10. Video LongVideoBench
* **Y-axis:** Implied scale representing percentile score (%). The scale is not explicitly labeled, but the values on the bars range from approximately 43% to 88%.
* **Models:** Four models are compared: Kimi K2.5, GPT-5.2 (xhigh), Claude Opus 4.5, and Gemini 3 Pro. Each model has a distinct color:
* Kimi K2.5: Blue
* GPT-5.2 (xhigh): Orange
* Claude Opus 4.5: Green
* Gemini 3 Pro: Purple
* **Legend/Icons:** Each bar is divided into four segments, each with a unique icon:
* "K" icon (likely representing a key metric)
* Star icon
* Diamond icon
* Triangle icon
* **Footer Text:** "* OmniDocBench Score is computed as (1 - normalized Levenshtein distance) x 100, where a higher score denotes superior accuracy."
### Detailed Analysis
Here's a breakdown of the performance for each model on each task, with approximate values based on visual estimation:
**Kimi K2.5 (Blue)**
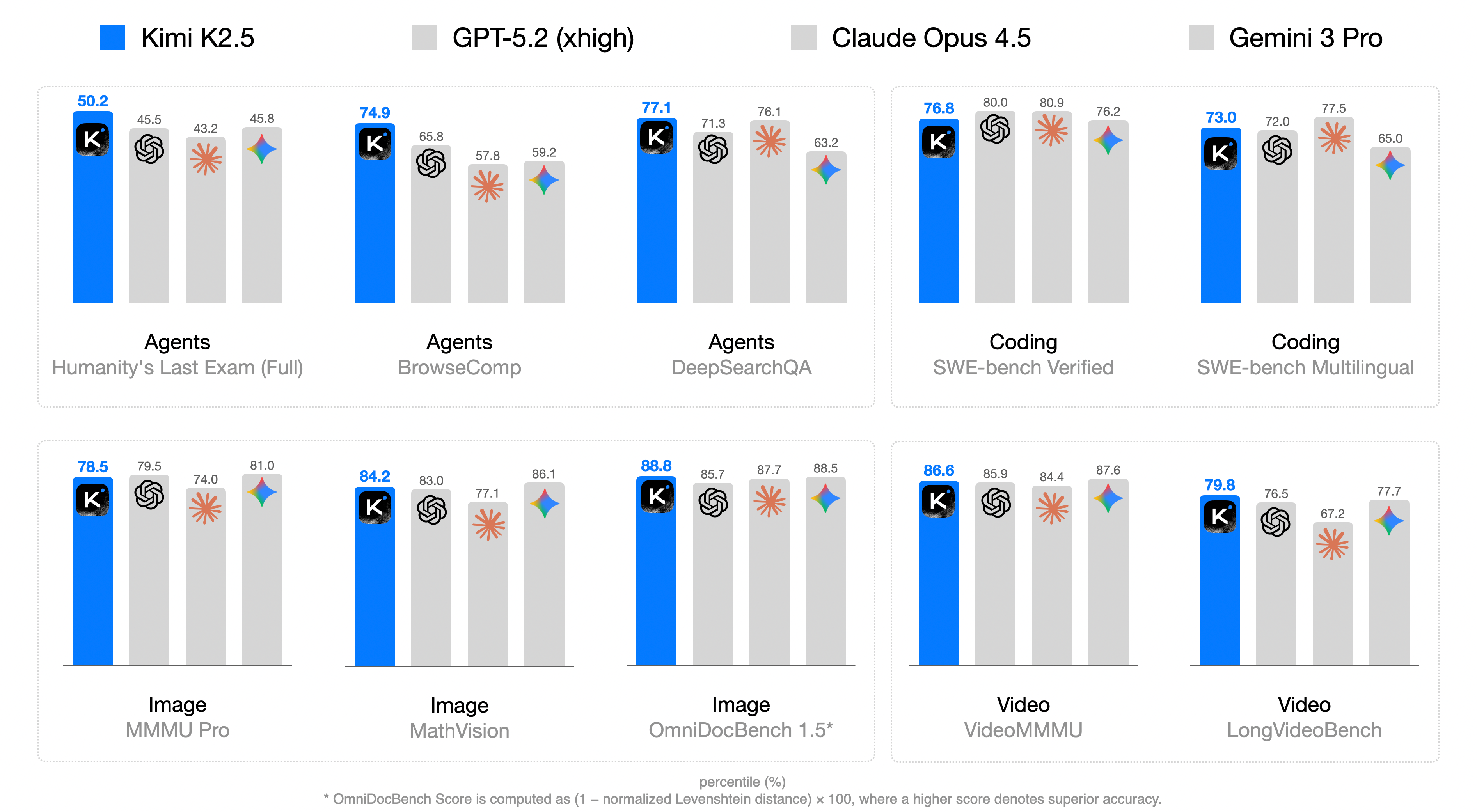
1. Agents Humanity's Last Exam (Full): 50.2%, 45.5%, 43.2%, 45.8%
2. Agents BrowseComp: 74.9%, 65.8%, 57.8%, 59.2%
3. Agents DeepSearchQA: 77.1%, 71.3%, 61.3%, 76.1%
4. Coding SWE-bench Verified: 76.8%, 80.0%, 80.9%, 76.2%
5. Coding SWE-bench Multilingual: 73.0%, 72.0%, 77.5%, 65.0%
6. Image MMMU Pro: 78.5%, 79.5%, 74.0%, 81.0%
7. Image MathVision: 84.2%, 83.0%, 77.1%, 86.1%
8. Image OmniDocBench 1.5*: 88.8%, 87.7%, 88.5%, 86.1%
9. Video VideoMMU: 86.6%, 85.9%, 84.4%, 87.6%
10. Video LongVideoBench: 79.8%, 78.5%, 67.2%, 77.7%
**GPT-5.2 (xhigh) (Orange)**
(Values are omitted for brevity, but follow the same format as above. The trend for each task can be visually assessed from the image.)
**Claude Opus 4.5 (Green)**
(Values are omitted for brevity, but follow the same format as above. The trend for each task can be visually assessed from the image.)
**Gemini 3 Pro (Purple)**
(Values are omitted for brevity, but follow the same format as above. The trend for each task can be visually assessed from the image.)
### Key Observations
* **OmniDocBench 1.5* consistently shows high scores** across all models, with Gemini 3 Pro achieving the highest score (approximately 88.8%).
* **Agents Humanity's Last Exam (Full) consistently shows the lowest scores** across all models, with Kimi K2.5 achieving the highest score (approximately 50.2%).
* **Gemini 3 Pro generally performs well**, often achieving the highest or near-highest scores across multiple tasks.
* **Kimi K2.5 shows relatively consistent performance** across tasks, with no exceptionally high or low scores.
* The internal segments within each bar (represented by the icons) show varying contributions to the overall score, suggesting different strengths and weaknesses within each model.
### Interpretation
This chart provides a comparative performance analysis of four leading multimodal models across a diverse set of benchmarks. The benchmarks cover areas like agent capabilities, coding, image understanding, and video processing. The use of percentile scores allows for a standardized comparison, although the specific meaning of each percentile requires understanding of the benchmark distributions.
The consistent high performance on OmniDocBench 1.5* suggests that all models are proficient in document understanding tasks, while the lower scores on Agents Humanity's Last Exam (Full) indicate a challenge in complex reasoning or human-level task completion.
The varying contributions of the internal segments (icons) within each bar suggest that the models excel in different aspects of each task. For example, a model might have a high score for the "K" icon but a lower score for the star icon, indicating strength in a specific evaluation criterion.
The chart highlights Gemini 3 Pro as a generally strong performer, but also reveals that the optimal model choice depends on the specific task. The footer note regarding OmniDocBench clarifies that the score is based on Levenshtein distance, indicating a focus on accuracy in text reproduction or matching. The chart is a valuable tool for researchers and practitioners seeking to understand the capabilities and limitations of these multimodal models.
</details>
Figure 1: Kimi K2.5 main results.
1 Introduction
Large Language Models (LLMs) are rapidly evolving toward agentic intelligence. Recent advances, such as GPT-5.2 [41], Claude Opus 4.5 [4], Gemini 3 Pro [19], and Kimi K2-Thinking [1], demonstrate substantial progress in agentic capabilities, particularly in tool calling and reasoning. These models increasingly exhibit the ability to decompose complex problems into multi-step plans and to execute long sequences of interleaved reasoning and actions.
In this report, we introduce the training methods and evaluation results of Kimi K2.5. Concretely, we improve the training of K2.5 over previous models in the following two key aspects.
Joint Optimization of Text and Vision. A key insight from the practice of K2.5 is that joint optimization of text and vision enhances both modalities and avoids the conflict. Specifically, we devise a set of techniques for this purpose. During pre-training, in contrast to conventional approaches that add visual tokens to a text backbone at a late stage [7, 20], we find early vision fusion with lower ratios tends to yield better results given the fixed total vision-text tokens. Therefore, K2.5 mixes text and vision tokens with a constant ratio throughout the entire training process.
Architecturally, Kimi K2.5 employs MoonViT-3D, a native-resolution vision encoder incorporating the NaViT packing strategy [14], enabling variable-resolution image inputs. For video understanding, we introduce a lightweight 3D ViT compression mechanism: consecutive frames are grouped in fours, processed through the shared MoonViT encoder, and temporally averaged at the patch level. This design allows Kimi K2.5 to process videos up to 4 $×$ longer within the same context window while maintaining complete weight sharing between image and video encoders.
During post-training, we introduce zero-vision SFT—text-only SFT alone activates visual reasoning and tool use. We find that adding human-designed visual trajectories at this stage hurts generalization. In contrast, text-only SFT performs better—likely because joint pretraining already establishes strong vision-text alignment, enabling capabilities to generalize naturally across modalities. We then apply joint RL on both text and vision tasks. Crucially, we find visual RL enhances textual performance rather than degrading it, with improvements on MMLU-Pro and GPQA-Diamond. This bidirectional enhancement—text bootstraps vision, vision refines text—represents superior cross-modal alignment in joint training.
Agent Swarm: Parallel Agent Orchestration. Most existing agentic models rely on sequential execution of tool calls. Even systems capable of hundreds of reasoning steps, such as Kimi K2-Thinking [1], suffer from linear scaling of inference time, leading to unacceptable latency and limiting task complexity. As agentic workloads grow in scope and heterogeneity—e.g., building a complex project that involves massive-scale research, design, and development—the sequential paradigm becomes increasingly inefficient.
To overcome the latency and scalability limits of sequential agent execution, Kimi K2.5 introduces Agent Swarm, a dynamic framework for parallel agent orchestration. We propose a Parallel-Agent Reinforcement Learning (PARL) paradigm that departs from traditional agentic RL [2]. In addition to optimizing tool execution via verifiable rewards, the model is equipped with interfaces for sub-agent creation and task delegation. During training, sub-agents are frozen and their execution trajectories are excluded from the optimization objective; only the orchestrator is updated via reinforcement learning. This decoupling circumvents two challenges of end-to-end co-optimization: credit assignment ambiguity and training instability. Agent Swarm enables complex tasks to be decomposed into heterogeneous sub-problems executed concurrently by domain-specialized agents, transforming task complexity from linear scaling to parallel processing. In wide-search scenarios, Agent Swarm reduces inference latency by up to 4.5 $×$ while improving item-level F1 from 72.8% to 79.0% compared to single-agent baselines.
Kimi K2.5 represents a unified architecture for general-purpose agentic intelligence, integrating vision and language, thinking and instant modes, chats and agents. It achieves strong performance across a broad range of agentic and frontier benchmarks, including state-of-the-art results in visual-to-code generation (image/video-to-code) and real-world software engineering in our internal evaluations, while scaling both the diversity of specialized agents and the degree of parallelism. To accelerate community progress toward General Agentic Intelligence, we open-source our post-trained checkpoints of Kimi K2.5, enabling researchers and developers to explore, refine, and deploy scalable agentic intelligence.
2 Joint Optimization of Text and Vision
Kimi K2.5 is a native multimodal model built upon Kimi K2 through large-scale joint pre-training on approximately 15 trillion mixed visual and text tokens. Unlike vision-adapted models that compromise either linguistic or visual capabilities, our joint pre-training paradigm enhances both modalities simultaneously. This section describes the multimodal joint optimization methodology that extends Kimi K2 to Kimi K2.5.
2.1 Native Multimodal Pre-Training
Table 1: Performance comparison across different vision-text joint-training strategies. Early fusion with a lower vision ratio yields better results given a fixed total vision-text token budget.
| | Vision Injection Timing | Vision-Text Ratio | Vision Knowledge | Vision Reasoning | OCR | Text Knowledge | Text Reasoning | Code |
| --- | --- | --- | --- | --- | --- | --- | --- | --- |
| Early | 0% | 10%:90% | 25.8 | 43.8 | 65.7 | 45.5 | 58.5 | 24.8 |
| Mid | 50% | 20%:80% | 25.0 | 40.7 | 64.1 | 43.9 | 58.6 | 24.0 |
| Late | 80% | 50%:50% | 24.2 | 39.0 | 61.5 | 43.1 | 57.8 | 24.0 |
A key design question for multimodal pre-training is: Given a fixed vision-text token budget, what is the optimal vision-text joint-training strategy. Conventional wisdom [7, 20] suggests introducing vision tokens predominantly in the later stages of LLM training at high ratios (e.g., 50% or higher) should accelerate multimodal capability acquisition, treating multimodal capability as a post-hoc add-on to linguistic competence.
However, our experiments (as shown in Table 1 Figure 9) reveal a different story. We conducted ablation studies varying the vision ratio and vision injection timing while keeping the total vision and text token budgets fixed. To strictly meet the targets for different ratios, we pre-trained the model with text-only tokens for a specifically calculated number of tokens before introducing vision data. Surprisingly, we found that the vision ratio has minimal impact on final multimodal performance. In fact, early fusion with a lower vision ratio yields better results given a fixed total vision-text token budget. This motivates our native multimodal pre-training strategy: rather than aggressive vision-heavy training concentrated at the end, we adopt a moderate vision ratio integrated early in the training process, allowing the model to naturally develop balanced multimodal representations while benefiting from extended co-optimization of both modalities.
2.2 Zero-Vision SFT
Pretrained VLMs do not naturally perform vision-based tool-calling, which poses a cold-start problem for multimodal RL. Conventional approaches address this issue through manually annotated or prompt-engineered chain-of-thought (CoT) data [7], but such methods are limited in diversity, often restricting visual reasoning to simple diagrams and primitive tool manipulations (crop, rotate, flip).
An observation is that high-quality text SFT data are relatively abundant and diverse. We propose a novel approach, zero-vision SFT, that uses only text SFT data to activate the visual, agentic capabilities during post-training. In this approach, all image manipulations are proxied through programmatic operations in IPython, effectively serving as a generalization of traditional vision tool-use. This "zero-vision" activation enables diverse reasoning behaviors, including pixel-level operations such as object size estimation via binarization and counting, and generalizes to visually grounded tasks such as object localization, counting, and OCR.
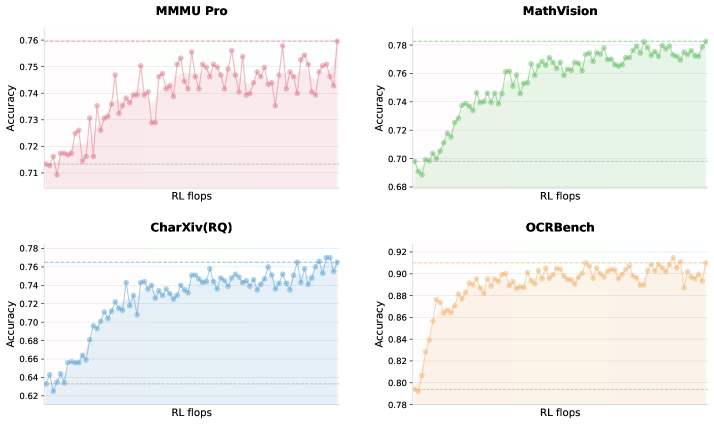
Figure 2 illustrates the RL training curves, where the starting points are obtained from zero-vision SFT. The results show that zero-vision SFT is sufficient for activating vision capabilities while ensuring generalization across modalities. This phenomenon is likely due to the joint pretraining of text and vision data as described in Section 2.1. Compared to zero-vision SFT, our preliminary experiments show that text-vision SFT yields much worse performance on visual, agentic tasks, possibly because of the lack of high-quality vision data.
2.3 Joint Multimodal Reinforcement Learning (RL)
In this section, we describe the methodology implemented in K2.5 that enables effective multimodal RL, from outcome-based visual RL to emergent cross-modal transfer that enhances textual performance.
<details>
<summary>x2.png Details</summary>
### Visual Description
## Charts: Model Accuracy vs. RL Flops
### Overview
The image presents four separate line charts, each depicting the relationship between "Accuracy" and "RL flops" for different models/benchmarks: MMMU Pro, MathVision, CharXiv(RQ), and OCRBench. Each chart shows a trend line representing accuracy as RL flops increase. The charts are arranged in a 2x2 grid.
### Components/Axes
Each chart shares the following components:
* **X-axis:** Labeled "RL flops". The scale appears to range from approximately 0 to 100 (units not specified).
* **Y-axis:** Labeled "Accuracy". The scale ranges from approximately 0.68 to 0.78 for MathVision, CharXiv(RQ), and OCRBench, and from 0.70 to 0.76 for MMMU Pro.
* **Data Series:** Each chart has a single line representing the accuracy trend.
* **Background:** Each chart has a lightly colored background, with a different color for each chart (pink for MMMU Pro, green for MathVision, blue for CharXiv(RQ), and orange for OCRBench).
### Detailed Analysis
**1. MMMU Pro (Top-Left)**
* **Line Color:** Pink
* **Trend:** The line generally slopes upward, but with significant fluctuations. It starts at approximately 0.715 accuracy at around 0 RL flops and reaches a peak of approximately 0.755 accuracy at around 80 RL flops, then declines slightly.
* **Data Points (approximate):**
* (0, 0.715)
* (20, 0.73)
* (40, 0.745)
* (60, 0.75)
* (80, 0.755)
* (100, 0.745)
**2. MathVision (Top-Right)**
* **Line Color:** Green
* **Trend:** The line shows a consistent upward trend, with less fluctuation than MMMU Pro. It starts at approximately 0.68 accuracy at around 0 RL flops and increases to approximately 0.77 accuracy at around 100 RL flops.
* **Data Points (approximate):**
* (0, 0.68)
* (20, 0.71)
* (40, 0.73)
* (60, 0.75)
* (80, 0.76)
* (100, 0.77)
**3. CharXiv(RQ) (Bottom-Left)**
* **Line Color:** Light Blue
* **Trend:** The line shows an upward trend, but with significant oscillations. It begins at approximately 0.64 accuracy at around 0 RL flops and reaches a peak of approximately 0.75 accuracy at around 60 RL flops, then fluctuates around that level.
* **Data Points (approximate):**
* (0, 0.64)
* (20, 0.68)
* (40, 0.72)
* (60, 0.75)
* (80, 0.73)
* (100, 0.74)
**4. OCRBench (Bottom-Right)**
* **Line Color:** Orange
* **Trend:** The line shows an initial steep upward trend, followed by a leveling off. It starts at approximately 0.78 accuracy at around 0 RL flops and increases to approximately 0.91 accuracy at around 40 RL flops, then plateaus.
* **Data Points (approximate):**
* (0, 0.78)
* (20, 0.85)
* (40, 0.91)
* (60, 0.90)
* (80, 0.89)
* (100, 0.88)
### Key Observations
* OCRBench demonstrates the fastest initial accuracy gains with increasing RL flops.
* MathVision shows the most consistent and stable accuracy improvement.
* MMMU Pro exhibits the most volatile accuracy, suggesting sensitivity to RL flops.
* CharXiv(RQ) shows a moderate improvement with significant fluctuations.
### Interpretation
The charts illustrate the performance of different models/benchmarks as computational resources (RL flops) are increased. The varying slopes and fluctuations suggest different levels of efficiency and stability in each model. OCRBench appears to benefit most from increased RL flops initially, quickly reaching a high level of accuracy. MathVision shows a steady, reliable improvement. MMMU Pro's fluctuating accuracy suggests that its performance is more sensitive to the specific training process or data distribution. CharXiv(RQ) shows a moderate improvement, but with considerable variability.
The data suggests that simply increasing RL flops does not guarantee improved accuracy, as demonstrated by MMMU Pro. The optimal balance between computational resources and model architecture/training strategy is crucial for achieving high performance. The leveling off of OCRBench's accuracy indicates a point of diminishing returns, where further increases in RL flops yield minimal improvements. These charts are likely used to evaluate the scalability and efficiency of different models in relation to computational cost.
</details>
Figure 2: Vision RL training curves on vision benchmarks starting from minimal zero-vision SFT. By scaling vision RL FLOPs, the performance continues to improve, demonstrating that zero-vision activation paired with long-running RL is sufficient for acquiring robust visual capabilities.
Outcome-Based Visual RL
Following the zero-vision SFT, the model requires further refinement to reliably incorporate visual inputs into reasoning. Text-initiated activation alone exhibits notable failure modes: visual inputs are sometimes ignored, and images may not be attended to when necessary. We employ outcome-based RL on tasks that explicitly require visual comprehension for correct solutions. We categorize these tasks into three domains:
- Visual grounding and counting: Accurate localization and enumeration of objects within images;
- Chart and document understanding: Interpretation of structured visual information and text extraction;
- Vision-critical STEM problems: Mathematical and scientific questions filtered to require visual inputs.
Outcome-based RL on these tasks improves both basic visual capabilities and more complex agentic behaviors. Extracting these trajectories for rejection-sampling fine-tuning (RFT) enables a self-improving data pipeline, allowing subsequent joint RL stages to leverage richer multimodal reasoning traces.
Visual RL Improves Text Performance
Table 2: Cross-Modal Transfer: Vision RL Improves Textual Knowledge
| Benchmark | Before Vision-RL | After Vision-RL | Improvement |
| --- | --- | --- | --- |
| MMLU-Pro | 84.7 | 86.4 | +1.7 |
| GPQA-Diamond | 84.3 | 86.4 | +2.1 |
| LongBench v2 | 56.7 | 58.9 | +2.2 |
To investigate potential trade-offs between visual and textual performance, we evaluated text-only benchmarks before and after visual RL. Surprisingly, outcome-based visual RL produced measurable improvements in textual tasks, including MMLU-Pro (84.7% $→$ 86.4%), GPQA-Diamond (84.3% $→$ 86.4%), and LongBench v2 (56.7% $→$ 58.9%) (Table 2). Analysis suggests that visual RL enhances calibration in areas requiring structured information extraction, reducing uncertainty on queries that resemble visually grounded reasoning (e.g., counting, OCR). These findings indicate that visual RL can contribute to cross-modal generalization, improving textual reasoning without observable degradation of language capabilities.
Joint Multimodal RL Motivated by the finding that robust visual capabilities can emerge from zero-vision SFT paired with vision RL—which further enhances general text abilities—we adopt a joint multimodal RL paradigm during Kimi K2.5’s post-training. Departing from conventional modality-specific expert divisions, we organize RL domains not by input modality but by abilities—knowledge, reasoning, coding, agentic, etc. These domain experts jointly learn from both pure-text and multimodal queries, while the Generative Reward Model (GRM) similarly optimizes across heterogeneous traces without modality barriers. This pardaigm ensures that capability improvements acquired through either textual or visual inputs inherently generalize to enhance related abilities across the alternate modality, thereby maximizing cross-modal capability transfer.
3 Agent Swarm
The primary challenge of existing agent-based systems lies in their reliance on sequential execution of reasoning and tool-calling steps. While this structure may be effective for simpler, short-horizon tasks, it becomes inadequate as the complexity of the task increases and the accumulated context grows. As tasks evolve to contain broad information gathering and intricate, multi-branch reasoning, sequential systems often encounter significant bottlenecks [6, 4, 5]. The limited capacity of a single agent working through each step one by one can lead to the exhaustion of practical reasoning depth and tool-call budgets, ultimately hindering the system’s ability to handle more complex scenarios.
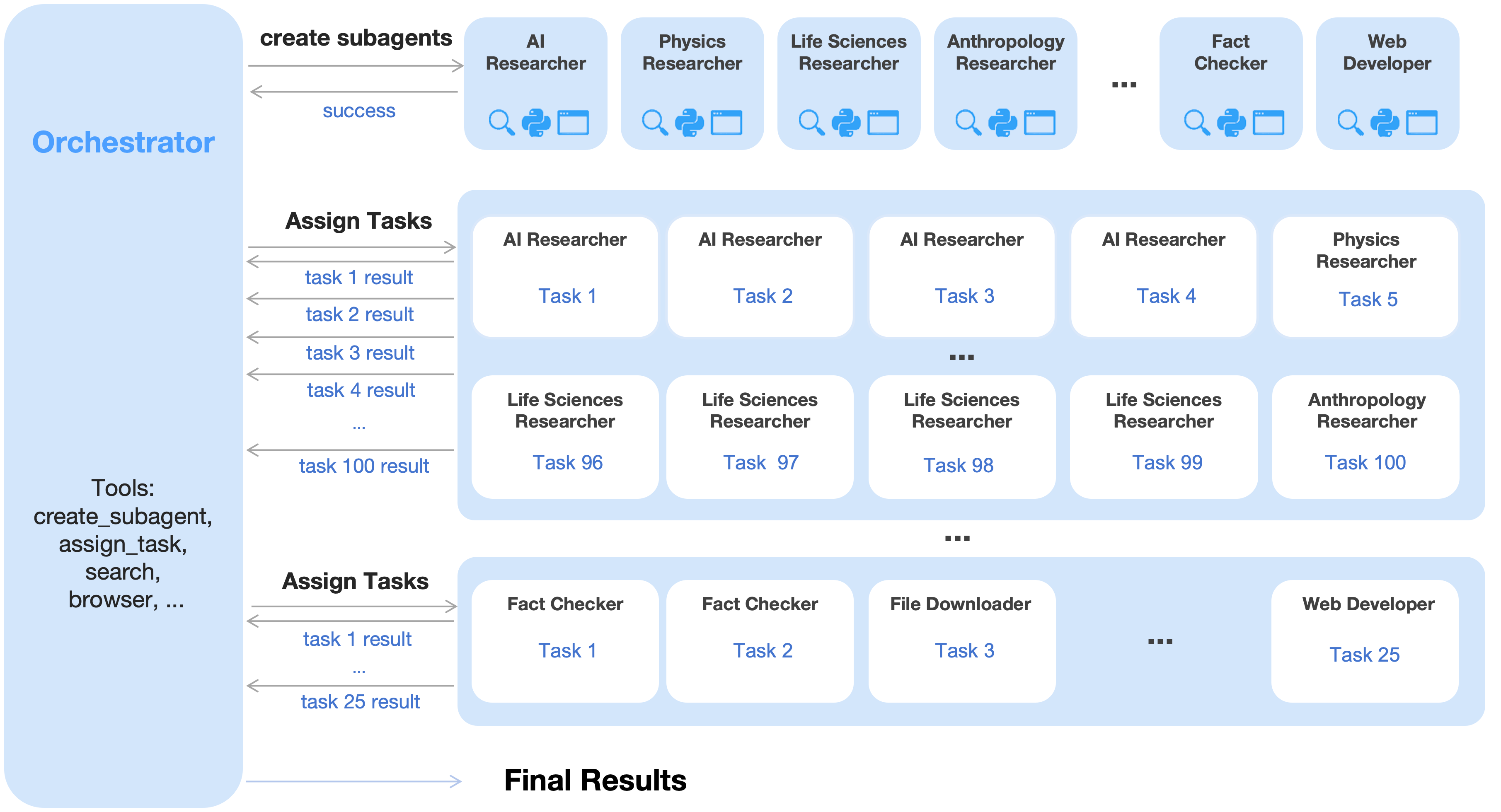
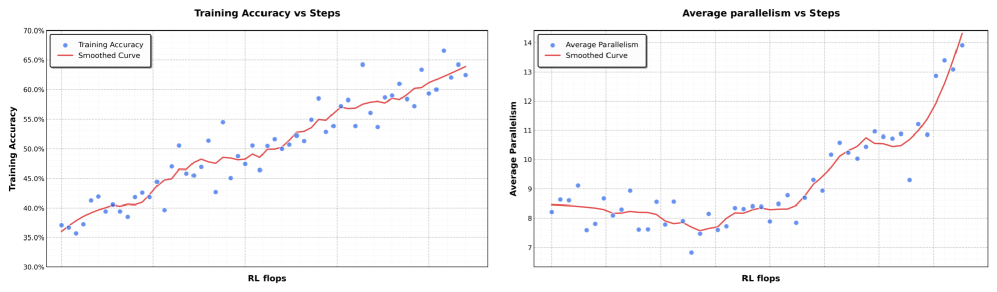
To address this, we introduce Agent Swarm and Parallel Agent Reinforcement Learning (PARL). Instead of executing a task as a reasoning chain or relying on pre-specified parallelization heuristics, K2.5 initiates an Agent Swarm through dynamic task decomposition, subagent instantiation, and parallel subtask scheduling. Importantly, parallelism is not presumed to be inherently advantageous; decisions regarding whether, when, and how to parallelize are explicitly learned through environmental feedback and RL-driven exploration. As shown in Figure 4, the progression of performance demonstrates this adaptive capability, with the cumulative reward increasing smoothly as the orchestrator optimizes its parallelization strategy throughout training.
<details>
<summary>figures/multi-agent-rl-system.png Details</summary>
### Visual Description
## Diagram: Agent Orchestration Workflow
### Overview
This diagram illustrates a workflow for orchestrating multiple agents to complete a series of tasks. The diagram depicts an "Orchestrator" component that creates subagents with specialized roles, assigns tasks to these agents, and ultimately collects "Final Results". The diagram emphasizes a multi-agent system with iterative task assignment and result collection.
### Components/Axes
The diagram is segmented into three main sections:
1. **Orchestrator (Top):** Initiates the process by creating subagents.
2. **Assign Tasks (Middle):** Shows the assignment of tasks to various agent types.
3. **Final Results (Bottom):** Represents the culmination of the workflow.
The diagram also highlights "Tools" available to the system, including `create_subagent`, `assign_task`, `search`, and `browser`.
Agent types include:
* AI Researcher
* Physics Researcher
* Life Sciences Researcher
* Anthropology Researcher
* Fact Checker
* Web Developer
* File Downloader
Task identifiers are represented as "Task X", where X is a number.
### Detailed Analysis or Content Details
The diagram shows a flow of actions and results between components.
**Orchestrator Section:**
* The Orchestrator initiates the creation of subagents via the "create subagents" arrow.
* The arrow is labeled "success", indicating a successful subagent creation.
* Six agent types are explicitly shown: AI Researcher, Physics Researcher, Life Sciences Researcher, Anthropology Researcher, Fact Checker, and Web Developer. Each agent type is represented by a rounded rectangle with an icon.
* AI Researcher: Icon depicts a magnifying glass, a computer chip, and a question mark.
* Physics Researcher: Icon depicts a magnifying glass, a computer chip, and a flask.
* Life Sciences Researcher: Icon depicts a magnifying glass, a computer chip, and a petri dish.
* Anthropology Researcher: Icon depicts a magnifying glass, a computer chip, and a head silhouette.
* Fact Checker: Icon depicts a magnifying glass, a computer chip, and a checkmark.
* Web Developer: Icon depicts a magnifying glass, a computer chip, and a bracket.
**Assign Tasks Section (Upper):**
* The Orchestrator assigns tasks to AI Researchers.
* Tasks are labeled "Task 1", "Task 2", "Task 3", "Task 4".
* An ellipsis (...) indicates that more tasks are assigned to AI Researchers.
* A Physics Researcher is shown receiving "Task 5".
**Assign Tasks Section (Lower):**
* Tasks are assigned to Life Sciences Researchers ("Task 96", "Task 97", "Task 98", "Task 99", "Task 100").
* An ellipsis (...) indicates that more tasks are assigned to Life Sciences Researchers.
* An Anthropology Researcher is shown receiving "Task 100".
* Tasks are assigned to Fact Checkers ("Task 1", "Task 2", "Task 3").
* An ellipsis (...) indicates that more tasks are assigned to Fact Checkers.
* A File Downloader is shown receiving "Task 3".
* A Web Developer is shown receiving "Task 25".
**Tools Section:**
* The "Tools" section lists available tools: `create_subagent`, `assign_task`, `search`, `browser`.
* An ellipsis (...) indicates that there are more tools available.
**Flow:**
* Arrows indicate the flow of tasks from the Orchestrator to the agents and the flow of results back to the Orchestrator.
* The arrows are labeled with "task X result", indicating the return of task results.
* The final output is labeled "Final Results".
### Key Observations
* The AI Researcher and Life Sciences Researcher appear to be assigned the most tasks, based on the visible task numbers.
* The diagram highlights a parallel processing approach, with multiple agents working on tasks simultaneously.
* The "Tools" section suggests the system has access to common functionalities for task execution.
* The diagram does not provide specific details about the nature of the tasks or the criteria for assigning them to different agents.
### Interpretation
This diagram represents a sophisticated workflow for automated task completion using a multi-agent system. The Orchestrator acts as a central controller, dynamically creating specialized agents and assigning tasks based on their expertise. The iterative flow of tasks and results suggests a continuous process of refinement and validation. The inclusion of a Fact Checker highlights the importance of ensuring the accuracy and reliability of the final results. The diagram suggests a system designed for complex problem-solving that requires diverse skill sets and parallel processing capabilities. The lack of specific task details implies that the system is adaptable to a wide range of applications. The diagram is a high-level overview and does not delve into the specifics of agent communication, task prioritization, or error handling.
</details>
Figure 3: An agent swarm has a trainable orchestrator that dynamically creates specialized frozen subagents and decomposes complex tasks into parallelizable subtasks for efficient distributed execution.
Architecture and Learning Setup
The PARL framework adopts a decoupled architecture comprising a trainable orchestrator and frozen subagents instantiated from fixed intermediate policy checkpoints. This design deliberately avoids end-to-end co-optimization to circumvent two fundamental challenges: credit assignment ambiguity and training instability. In this multi-agent setting, outcome-based rewards are inherently sparse and noisy; a correct final answer does not guarantee flawless subagent execution, just as a failure does not imply universal subagent error. By freezing the subagents and treating their outputs as environmental observations rather than differentiable decision points, we disentangle high-level coordination logic from low-level execution proficiency, leading to more robust convergence. To improve efficiency, we first train the orchestrator using small-size subagents before transitioning to larger models. Our RL framework also supports dynamically adjusting the inference instance ratios between subagents and the orchestrator, thereby maximizing the resource usage across the cluster.
PARL Reward
Training a reliable parallel orchestrator is challenging due to the delayed, sparse, and non-stationary feedback inherent in independent subagent execution. To address this, we define the PARL reward as:
| | $\displaystyle r_{\mathrm{PARL}}(x,y)=\lambda_{1}·\mspace{-26.0mu}\underbrace{r_{\text{parallel}}}_{\text{instantiation reward}}\mspace{-9.0mu}+\mspace{18.0mu}\lambda_{2}·\mspace{-32.0mu}\underbrace{r_{\text{finish}}}_{\text{sub-agent finish rate}}+\underbrace{r_{\text{perf}}(x,y)}_{\text{task-level outcome}}\,.$ | |
| --- | --- | --- |
The performance reward $r_{\text{perf}}$ evaluates the overall success and quality of the solution $y$ for a given task $x$ . This is augmented by two auxiliary rewards, each addressing a distinct challenge in learning parallel orchestration. The reward $r_{\text{parallel}}$ is introduced to mitigate serial collapse —a local optimum where the orchestrator defaults to single-agent execution. By incentivizing subagent instantiation, this term encourages the exploration of concurrent scheduling spaces. The $r_{\text{finish}}$ reward focuses on the successful completion of assigned subtasks. It is used to prevent spurious parallelism, a reward-hacking behavior in which the orchestrator increases parallel metrics dramatically by spawning many subagents without meaningful task decomposition. By rewarding completed subtasks, $r_{\text{finish}}$ enforces feasibility and guides the policy toward valid and effective decompositions.
To ensure the final policy optimizes for the primary objective, the hyperparameters $\lambda_{1}$ and $\lambda_{2}$ are annealed to zero over the course of training.
Critical Steps as Resource Constraint
To measure computational time cost in a parallel-agent setting, we define critical steps by analogy to the critical path in a computation graph. We model an episode as a sequence of execution stages indexed by $t=1,...,T$ . In each stage, the main agent executes an action, which corresponds to either direct tool invocation or the instantiation of a group of subagents running in parallel. Let $S_{\mathrm{main}}^{(t)}$ denote the number of steps taken by the main agent in stage $t$ (typically $S_{\mathrm{main}}^{(t)}=1$ ), and $S_{\mathrm{sub},i}^{(t)}$ denote the number of steps taken by the $i$ -th subagent in that parallel group. The duration of stage $t$ is governed by the longest-running subagent within that cohort. Consequently, the total critical steps for an episode are defined as
| | $\displaystyle\text{CriticalSteps}=\sum_{t=1}^{T}\left(S_{\mathrm{main}}^{(t)}+\max_{i}S_{\mathrm{sub},i}^{(t)}\right).$ | |
| --- | --- | --- |
By constraining training and evaluation using critical steps rather than total steps, the framework explicitly incentivizes effective parallelization. Excessive subtask creation that does not reduce the maximum execution time of parallel groups yields little benefit under this metric, while well-balanced task decomposition that shortens the longest parallel branch directly reduces critical steps. As a result, the orchestrator is encouraged to allocate work across subagents in a way that minimizes end-to-end latency, rather than merely maximizing concurrency or total work performed.
Prompt Construction for Parallel-agent Capability Induction
To incentivize the orchestrator to leverage the advantages of parallelization, we construct a suite of synthetic prompts designed to stress the limits of sequential agentic execution. These prompts emphasize either wide search, requiring simultaneous exploration of many independent information sources, or deep search, requiring multiple reasoning branches with delayed aggregation. We additionally include tasks inspired by real-world workloads, such as long-context document analysis and large-scale file downloading. When executed sequentially, these tasks are difficult to complete within fixed reasoning-step and tool-call budgets. By construction, they encourage the orchestrator to allocate subtasks in parallel, enabling completion within fewer critical steps than would be feasible for a single sequential agent. Importantly, the prompts do not explicitly instruct the model to parallelize. Instead, they shape the task distribution such that parallel decomposition and scheduling strategies are naturally favored.
<details>
<summary>x3.png Details</summary>
### Visual Description
\n
## Charts: Training Performance Metrics
### Overview
The image presents two line charts displaying training performance metrics over training steps (measured in RL Flops). The left chart shows "Training Accuracy vs Steps", while the right chart shows "Average Parallelism vs Steps". Both charts include a scatter plot of raw data points and a smoothed curve representing the trend.
### Components/Axes
**Left Chart: Training Accuracy vs Steps**
* **Title:** Training Accuracy vs Steps
* **X-axis:** RL Flops (Scale is not explicitly labeled, but ranges approximately from 0 to 100)
* **Y-axis:** Training Accuracy (Scale ranges from 30% to 70%)
* **Legend:**
* Training Accuracy (Blue dots)
* Smoothed Curve (Red line)
**Right Chart: Average Parallelism vs Steps**
* **Title:** Average Parallelism vs Steps
* **X-axis:** RL Flops (Scale is not explicitly labeled, but ranges approximately from 0 to 100)
* **Y-axis:** Average Parallelism (Scale ranges from 7 to 14)
* **Legend:**
* Average Parallelism (Blue dots)
* Smoothed Curve (Red line)
### Detailed Analysis or Content Details
**Left Chart: Training Accuracy vs Steps**
The blue scatter plot representing "Training Accuracy" shows a generally upward trend, with significant variance. The data starts around 35% accuracy at approximately 0 RL Flops and increases to around 65% accuracy at approximately 100 RL Flops. The red "Smoothed Curve" follows this upward trend, providing a more generalized representation of the accuracy improvement.
* Approximate Data Points (Training Accuracy):
* (0 RL Flops, 35% Accuracy)
* (20 RL Flops, 40% Accuracy)
* (40 RL Flops, 48% Accuracy)
* (60 RL Flops, 54% Accuracy)
* (80 RL Flops, 60% Accuracy)
* (100 RL Flops, 65% Accuracy)
**Right Chart: Average Parallelism vs Steps**
The blue scatter plot representing "Average Parallelism" shows a more complex trend. Initially, the parallelism decreases from approximately 10 to a minimum of around 8 at approximately 30 RL Flops. After this point, the parallelism increases sharply, reaching approximately 14 at 100 RL Flops. The red "Smoothed Curve" attempts to capture this non-linear behavior.
* Approximate Data Points (Average Parallelism):
* (0 RL Flops, 10 Parallelism)
* (20 RL Flops, 9 Parallelism)
* (30 RL Flops, 8 Parallelism)
* (50 RL Flops, 9 Parallelism)
* (70 RL Flops, 11 Parallelism)
* (90 RL Flops, 13 Parallelism)
* (100 RL Flops, 14 Parallelism)
### Key Observations
* Both charts exhibit an upward trend in the later stages of training.
* The "Average Parallelism" chart shows an initial decrease followed by a significant increase, suggesting a change in the training dynamics.
* The scatter plots show considerable noise, indicating variability in the training process.
* The smoothed curves provide a clearer view of the overall trends, but may obscure some of the underlying fluctuations.
### Interpretation
The charts demonstrate the training progress of a model. The increasing "Training Accuracy" indicates that the model is learning and improving its performance over time. The "Average Parallelism" chart suggests that the training process may have initially been limited by parallelism, but as training progressed, the system was able to leverage more parallel processing, leading to a significant increase in parallelism and potentially faster training. The initial dip in parallelism could be due to overhead or synchronization costs at the beginning of training. The divergence between the raw data and the smoothed curves highlights the importance of considering both the overall trend and the underlying variability when evaluating training performance. The data suggests a successful training run, with both accuracy and parallelism improving over time.
</details>
Figure 4: In our parallel-agent reinforcement learning environment, the training accuracy increases smoothly as training progresses. At the same time, the level of parallelism during training also gradually increases.
4 Method Overview
4.1 Foundation: Kimi K2 Base Model
The foundation of Kimi K2.5 is Kimi K2 [53], a trillion-parameter mixture-of-experts (MoE) transformer [59] model pre-trained on 15 trillion high-quality text tokens. Kimi K2 employs the token-efficient MuonClip optimizer [29, 33] with QK-Clip for training stability. The model comprises 1.04 trillion total parameters with 32 billion activated parameters, utilizing 384 experts with 8 activated per token (sparsity of 48). For detailed descriptions of MuonClip, architecture design, and training infrastructure, we refer to the Kimi K2 technical report [53].
4.2 Model Architecture
The multimodal architecture of Kimi K2.5 consists of three components: a three-dimensional native-resolution vision encoder (MoonViT-3D), an MLP projector, and the Kimi K2 MoE language model, following the design principles established in Kimi-VL [54].
MoonViT-3D: Shared Embedding Space for Images and Videos
In Kimi-VL, we employ MoonViT to natively process images at their original resolutions, eliminating the need for complex sub-image splitting and splicing operations. Initialized from SigLIP-SO-400M [77], MoonViT incorporates the patch packing strategy from NaViT [14], where single images are divided into patches, flattened, and sequentially concatenated into 1D sequences, thereby enabling efficient simultaneous training on images at varying resolutions.
To maximize the transfer of image understanding capabilities to video, we introduce MoonViT-3D with a unified architecture, fully shared parameters, and a consistent embedding space. By generalizing the “patch n’ pack“ philosophy to the temporal dimension, up to four consecutive frames are treated as a spatiotemporal volume: 2D patches from these frames are jointly flattened and packed into a single 1D sequence, allowing the identical attention mechanism to operate seamlessly across both space and time. While the extra temporal attention improves understanding on high-speed motions and visual effects, the sharing maximizes knowledge generalization from static images to dynamic videos, achieving strong video understanding performance (see in Tab. 4) without requiring specialized video modules or architectural bifurcation. Prior to the MLP projector, lightweight temporal pooling aggregates patches within each temporal chunk, yielding $4×$ temporal compression to significantly extend feasible video length. The result is a unified pipeline where knowledge and ability obtained from image pretraining transfers holistically to videos through one shared parameter space and feature representation.
4.3 Pre-training Pipeline
As illustrated in Table 3, Kimi K2.5’s pre-training builds upon the Kimi K2 language model checkpoint and processes approximately 15T tokens across three stages: first, standalone ViT training to establish a robust native-resolution visual encoder; second, joint pre-training to simultaneously enhance language and multimodal capabilities; and third, mid-training on high-quality data and long-context activation to refine capabilities and extend context windows.
Table 3: Overview of training stages: data composition, token volumes, sequence lengths, and trainable components.
| Stages | ViT Training | Joint Pre-training | Joint Long-context Mid-training |
| --- | --- | --- | --- |
| Data | Alt text Synthesis Caption Grounding, OCR, Video | + Text, Knowledge Interleaving Video, OS Screenshot | + High-quality Text & Multimodal Long Text, Long Video Reasoning, Long-CoT |
| Sequence length | 4096 | 4096 | 32768 $→$ 262144 |
| Tokens | 1T | 15T | 500B $→$ 200B |
| Training | ViT | ViT & LLM | ViT & LLM |
ViT Training Stage
The MoonViT-3D is continual pre-trained from SigLIP [77] on image-text and video-text pairs, where the text components consist of a variety of targets: image alt texts, synthetic captions of images and videos, grounding bboxes, and OCR texts. Unlike the implementation in Kimi-VL [54], this continual pre-training does not include a contrastive loss, but incorporates solely cross-entropy loss ${L}_{caption}$ for caption generation conditioned on input images and videos. We adopt a two-stage alignment strategy. In the first stage, we update the MoonViT-3D to align it with Moonlight-16B-A3B [33] via the caption loss, consuming about 1T tokens with very few training FLOPs. This stage allows MoonViT-3D to primarily understand high-resolution images and videos. A very short second stage follows, updating only the MLP projector to bridge the ViT with the 1T LLM for smoother joint pre-training.
Joint Training Stages
The joint pre-training stage continues from a near-end Kimi K2 checkpoint over additional 15T vision-text tokens at 4K sequence length. The data recipe extends Kimi K2’s pre-training distribution by introducing unique tokens, adjusting data proportions with increased weight on coding-related content, and controlling maximum epochs per data source. The third stage performs long-context activation with integrated higher-quality mid-training data, sequentially extending context length via YaRN [44] interpolation. This yields significant generalization improvements in long-context text understanding and long video comprehension.
4.4 Post-Training
4.4.1 Supervised Fine-Tuning
Following the SFT pipeline established by Kimi K2 [53], we developed K2.5 by synthesizing high-quality candidate responses from K2, K2 Thinking and a suite of proprietary in-house expert models. Our data generation strategy employs specialized pipelines tailored to specific domains, integrating human annotation with advanced prompt engineering and multi-stage verification. This methodology produced a large-scale instruction-tuning dataset featuring diverse prompts and intricate reasoning trajectories, ultimately training the model to prioritize interactive reasoning and precise tool-calling for complex, real-world applications.
4.4.2 Reinforcement Learning
Reinforcement learning constitutes a crucial phase of our post-training. To facilitate joint optimization across text and vision modalities, as well as to enable PARL for agent swarm, we develop a Unified Agentic Reinforcement Learning Environment (Appendix D) and optimize the RL algorithms. Both text-vision joint RL and PARL are built upon the algorithms described in this section.
Policy Optimization
For each problem $x$ sampled from a dataset $\mathcal{D}$ , $K$ responses $\{y_{1},...,y_{K}\}$ are generated using the previous policy $\pi_{\mathrm{old}}$ . We optimize the model $\pi_{\theta}$ with respect to the following objective:
$$
\displaystyle L_{\mathrm{RL}}(\theta)=\mathbb{E}_{x\sim\mathcal{D}}\left[\frac{1}{N}\sum_{j=1}^{K}\sum_{i=1}^{|y_{j}|}\mathrm{Clip}\left(\frac{\pi_{\theta}(y_{j}^{i}|x,y_{j}^{0:i})}{\pi_{\mathrm{old}}(y_{j}^{i}|x,y_{j}^{0:i})},\alpha,\beta\right)({r}(x,y_{j})-\bar{r}(x))-\tau\left(\log\frac{\pi_{\theta}(y_{j}^{i}|x,y_{j}^{0:i})}{\pi_{\mathrm{old}}(y_{j}^{i}|x,y_{j}^{0:i})}\right)^{2}\right]\,. \tag{1}
$$
Here $\alpha,\beta,\tau>0$ are hyperparameters, $y^{j}_{0:i}$ is the prefix up to the $i$ -th token of the $j$ -th response, $N=\sum_{i=1}^{K}|y_{i}|$ is the total number of generated tokens in a batch, $\bar{r}(x)=\frac{1}{K}\sum_{j=1}^{K}r(x,y_{j})$ is the mean reward of all generated responses.
This loss function departs from the policy optimization algorithm used in K1.5 [30] by introducing a token-level clipping mechanism designed to mitigate the off-policy divergence amplified by discrepancies between training and inference frameworks. The mechanism functions as a simple gradient masking scheme: policy gradients are computed normally for tokens with log-ratios within the interval $[\alpha,\beta]$ , while gradients for tokens falling outside this range are zeroed out. Notably, a key distinction from standard PPO clipping [50] is that our method relies strictly on the log-ratio to explicitly bound off-policy drift, regardless of the sign of the advantages. This approach aligns with recent strategies proposed to stabilize large-scale RL training [74, 78]. Empirically, we find this mechanism essential for maintaining training stability in complex domains requiring long-horizon, multi-step tool-use reasoning. We employ the MuonClip optimizer [29, 33] to minimize this objective.
Reward Function
We apply a rule-based outcome reward for tasks with verifiable solutions, such as reasoning and agentic tasks. To optimize resource consumption, we also incorporate a budget-control reward aimed at enhancing token efficiency. For general-purpose tasks, we employ Generative Reward Models (GRMs) that provide granular evaluations aligned with Kimi’s internal value criteria. In addition, for visual tasks, we design task-specific reward functions to provide fine-grained supervision. For visual grounding and point localization tasks, we employ an F1-based reward with soft matching: grounding tasks derive soft matches from Intersection over Union (IoU) and point tasks derive soft matches from Gaussian-weighted distances under optimal matching. For polygon segmentation tasks, we rasterize the predicted polygon into a binary mask and compute the segmentation IoU against the ground-truth mask to assign the reward. For OCR tasks, we adopt normalized edit distance to quantify character-level alignment between predictions and ground-truth. For counting tasks, rewards are assigned based on the absolute difference between predictions and ground-truth. Furthermore, we synthesize complex visual puzzle problems and utilize an LLM verifier (Kimi K2) to provide feedback.
Generative Reward Models
Kimi K2 leverages a self-critique rubric reward for open-ended generation [53], and K2.5 extends this line of work by systematically deploying Generative Reward Models (GRMs) across a broad range of agentic behaviors and multimodal trajectories. Rather than limiting reward modeling to conversational outputs, we apply GRMs on top of verified reward signals in diverse environments, including chat assistants, coding agents, search agents, and artifact-generating agents. Notably, GRMs function not as binary adjudicators, but as fine-grained evaluators aligned with Kimi’s values that are critical to user experiences, such as helpfulness, response readiness, contextual relevance, appropriate level of detail, aesthetic quality of generated artifacts, and strict instruction following. This design allows the reward signal to capture nuanced preference gradients that are difficult to encode with purely rule-based or task-specific verifiers. To mitigate reward hacking and overfitting to a single preference signal, we employ multiple alternative GRM rubrics tailored to different task contexts.
Token Efficient Reinforcement Learning
Token efficiency is central to LLMs with test-time scaling. While test-time scaling inherently trades computation for reasoning quality, practical gains require algorithmic innovations that actively navigate this trade-off. Our previous findings indicate that imposing a problem-dependent budget effectively constrains inference-time compute, incentivizing the model to generate more concise chain of thought reasoning patterns without unnecessary token expansion [30, 53]. However, we also observe a length-overfitting phenomenon: models trained under rigid budget constraints often fail to generalize to higher compute scales. Consequently, they cannot effectively leverage additional inference-time tokens to solve complex problems, instead defaulting to truncated reasoning patterns.
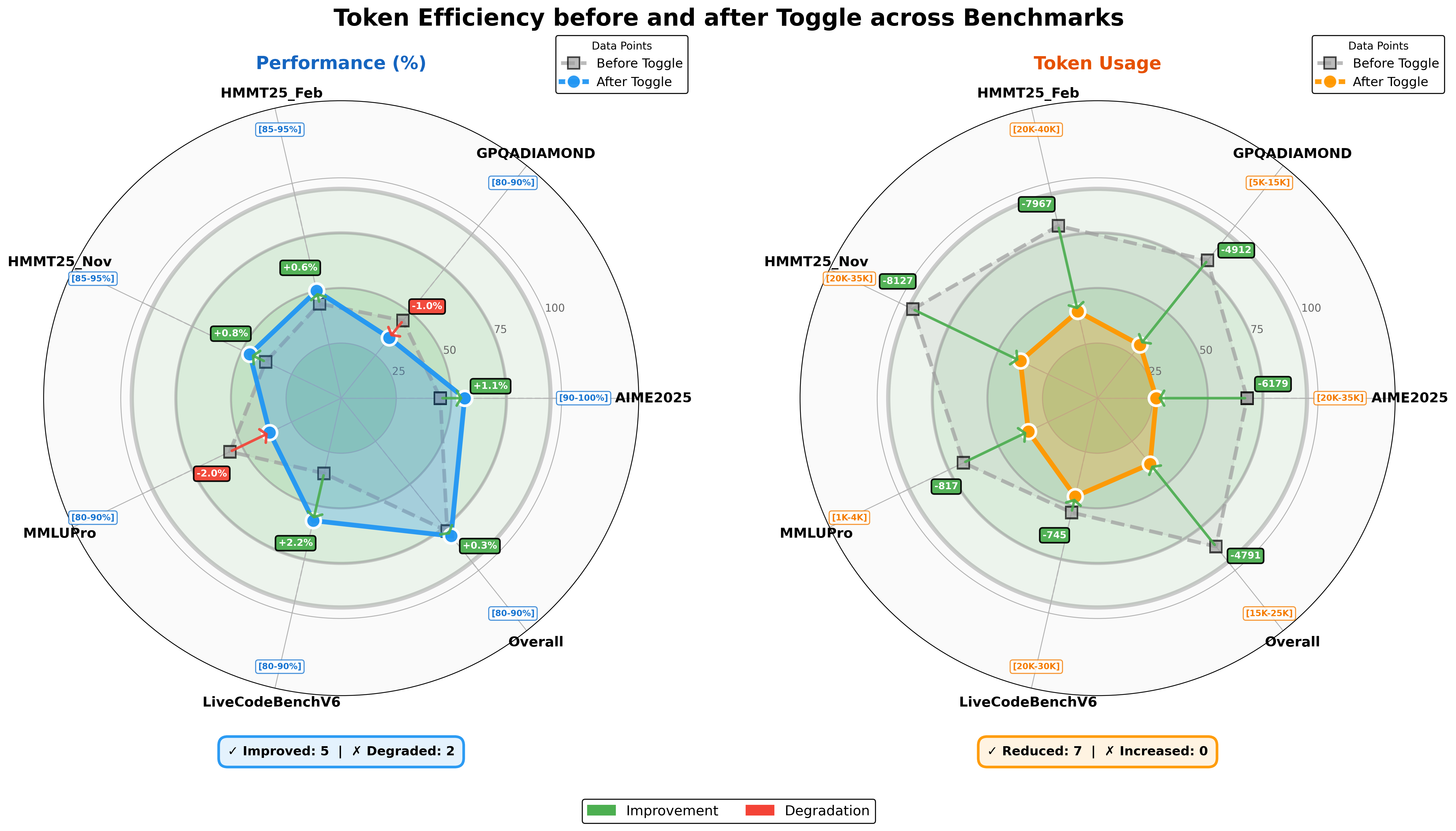
To this end, we propose Toggle, a training heuristic that alternates between inference-time scaling and budget-constrained optimization: for learning iteration $t$ , the reward function is defined by
| | $\displaystyle\tilde{r}(x,y)=\begin{cases}r(x,y)·\mathbb{I}\left\{\frac{1}{K}\sum_{i=1}^{K}r(x,y_{i})<\lambda\ \mathrm{or}\ |y_{i}|≤\mathrm{budget(x)}\right\}&\text{if }\lfloor t/m\rfloor±od{2}=0\ (\mathrm{{Phase0}})\\
r(x,y)&\text{if }\lfloor t/m\rfloor±od{2}=1\ (\mathrm{{Phase1}})\end{cases}\,.$ | |
| --- | --- | --- |
where $\lambda$ and $m$ are hyper-parameters of the algorithm and $K$ is the number of rollouts per problem. Specifically, the algorithm alternates between two optimization phases every $m$ iterations:
- Phase0 (budget limited phase): The model is trained to solve the problem within a task-dependent token budget. To prevent a premature sacrifice of quality for efficiency, this constraint is conditionally applied: it is only enforced when the model’s mean accuracy for a given problem exceeds the threshold $\lambda$ .
- Phase1 (standard scaling phase): The model generates responses up to the maximum token limit, encouraging the model to leverage computation for better inference-time scaling.
The problem-dependent budget is estimated from the $\rho$ -th percentile of token lengths among the subset of correct responses:
$$
\mathrm{budget}(x)=\text{Percentile}\left(\{|y_{j}|\mid r(x,y_{i})=1,i=1,\dots,K\},\rho\right)\,. \tag{2}
$$
This budget is estimated once at the beginning of training and remains fixed thereafter. Notably, Toggle functions as a stochastic alternating optimization for a bi-objective problem. It is specifically designed to reconcile reasoning capabilities with computational efficiency.
<details>
<summary>figures/te-k2-thinking-radar.png Details</summary>
### Visual Description
\n
## Radar Charts: Token Efficiency before and after Toggle across Benchmarks
### Overview
The image presents two radar charts comparing "Token Efficiency" (Performance in %) and "Token Usage" across several benchmarks before and after a "Toggle" is applied. The benchmarks are: HMMT25_Feb, HMMT25_Nov, MMLUPro, AIME2025, GPQDIAMOND, LiveCodeBenchV6, and Overall. A summary at the bottom indicates 5 benchmarks improved and 2 degraded in performance, while 7 benchmarks reduced token usage and none increased.
### Components/Axes
* **Chart Type:** Radar Chart (Spider Chart)
* **Axis Titles:** The charts do not have explicit axis titles, but the radial axes represent the benchmarks listed above. The scale ranges from 0 to 100 for Performance (%) and appears to be in units of 10k for Token Usage.
* **Legends:** Two legends are present.
* **Performance (%) Legend:** Located in the top-left corner.
* Blue: Before Toggle
* Light Blue: After Toggle
* **Token Usage Legend:** Located in the top-right corner.
* Yellow: Before Toggle
* Orange: After Toggle
* **Benchmarks (Categories):** HMMT25_Feb, HMMT25_Nov, MMLUPro, AIME2025, GPQDIAMOND, LiveCodeBenchV6, Overall.
* **Indicators:** Improvement (Green) and Degradation (Red) indicators at the bottom.
### Detailed Analysis or Content Details
**Performance (%) - Left Chart**
* **HMMT25_Feb:** Before Toggle: ~85-95%. After Toggle: ~90-95% (+6.6%).
* **HMMT25_Nov:** Before Toggle: ~85-95%. After Toggle: ~90-95% (+0.8%).
* **MMLUPro:** Before Toggle: ~80-90%. After Toggle: ~80-90% (-2.0%).
* **AIME2025:** Before Toggle: ~90-100%. After Toggle: ~90-100% (+1.1%).
* **GPQDIAMOND:** Before Toggle: ~80-90%. After Toggle: ~80-90% (+0.3%).
* **LiveCodeBenchV6:** Before Toggle: ~80-90%. After Toggle: ~80-90% (+2.2%).
* **Overall:** Before Toggle: ~80-90%. After Toggle: ~80-90% (+0.3%).
**Token Usage - Right Chart**
* **HMMT25_Feb:** Before Toggle: ~200k-350k. After Toggle: ~7967.
* **HMMT25_Nov:** Before Toggle: ~200k-350k. After Toggle: ~8127.
* **MMLUPro:** Before Toggle: ~110k-150k. After Toggle: ~745.
* **AIME2025:** Before Toggle: ~200k-350k. After Toggle: ~6179.
* **GPQDIAMOND:** Before Toggle: ~30k-150k. After Toggle: ~4912.
* **LiveCodeBenchV6:** Before Toggle: ~200k-300k. After Toggle: ~-817.
* **Overall:** Before Toggle: ~150k-250k. After Toggle: ~-879.
### Key Observations
* **Performance:** Most benchmarks show a slight improvement in performance after the toggle, with HMMT25_Feb showing the largest gain (+6.6%). MMLUPro shows a slight degradation (-2.0%).
* **Token Usage:** Token usage dramatically *decreased* across all benchmarks after the toggle. LiveCodeBenchV6 and Overall show negative token usage after the toggle, which is likely an artifact of the scale or data representation.
* **Correlation:** There doesn't appear to be a strong correlation between performance improvement and token usage reduction. Some benchmarks improved in performance with significant token usage reduction, while others showed minimal performance change with substantial token usage reduction.
* **Outliers:** LiveCodeBenchV6 and Overall have notably large reductions in token usage, and negative values, which warrants further investigation.
### Interpretation
The data suggests that the "Toggle" significantly reduces token usage across all benchmarks, with minimal impact on performance for most. The substantial reduction in token usage, particularly for LiveCodeBenchV6 and Overall, could indicate a more efficient model or algorithm after the toggle. The negative token usage values for these benchmarks are unusual and may represent a limitation in the data representation or a specific characteristic of those benchmarks.
The fact that most benchmarks show performance improvement alongside token usage reduction is a positive outcome, suggesting that the toggle doesn't compromise performance while making the model more efficient. The slight degradation in MMLUPro performance might indicate a trade-off or a specific sensitivity of that benchmark to the toggle.
The radar chart format effectively visualizes the relative performance and token usage across different benchmarks, allowing for a quick comparison of the impact of the toggle. The color-coding (blue/light blue and yellow/orange) clearly distinguishes between the "Before Toggle" and "After Toggle" states. The summary indicators (improvement/degradation) provide a concise overview of the overall impact.
</details>
Figure 5: Comparison of model performance and token usage for Kimi K2 Thinking following token-efficient RL.
We evaluate the effectiveness of Toggle on K2 Thinking [1]. As shown in Figure 5, we observe a consistent reduction in output length across nearly all benchmarks. On average, Toggle decreases output tokens by 25 $\sim$ 30% with a negligible impact on performance. We also observe that redundant patterns in the chain-of-thought, such as repeated verifications and mechanical calculations, decrease substantially. Furthermore, Toggle shows strong domain generalization. For example, when trained exclusively on mathematics and programming tasks, the model still achieves consistent token reductions on GPQA and MMLU-Pro with only marginal degradation in performance (Figure 5).
4.5 Training Infrastructure
Kimi K2.5 inherits the training infrastructure from Kimi K2 [53] with minimal modifications. For multimodal training, we propose Decoupled Encoder Process, where the vision encoder is incorporated into the existing pipeline with negligible additional overhead.
4.5.1 Decoupled Encoder Process (DEP)
In a typical multimodal training paradigm utilizing Pipeline Parallelism (PP), the vision encoder and text embedding are co-located in the first stage of the pipeline (Stage-0). However, due to the inherent variations of multimodal input size (e.g., image counts and resolutions), Stage-0 suffers from drastic fluctuations in both computational load and memory usage. This forces existing solutions to adopt custom PP configurations for vision-language models — for instance, [54] manually adjusts the number of text decoder layers in Stage-0 to reserve memory. While this compromise alleviates memory pressure, it does not fundamentally resolve the load imbalance caused by multimodal input sizes. More critically, it precludes the direct reuse of parallel strategies that have been highly optimized for text-only training.
Leveraging the unique topological position of the visual encoder within the computation graph — specifically, its role as the start of the forward pass and the end of the backward pass — our training uses Decoupled Encoder Process (DEP), which is composed of three stages in each training step:
- Balanced Vision Forward: We first execute the forward pass for all visual data in the global batch. Because the vision encoder is small, we replicate it on all GPUs regardless of other parallelism strategies. During this phase, the forward computational workload is evenly distributed across all GPUs based on load metrics (e.g., image or patch counts). This eliminates load-imbalance caused by PP and visual token counts. To minimize peak memory usage, we discard all intermediate activations, retaining only the final output activations. The results are gathered back to PP Stage-0;
- Backbone Training: This phase performs the forward and backward passes for the main transformer backbone. By discarding intermediate activations in the preceding phase, we can now fully leverage any efficient parallel strategies validated in pure text training. After this phase, gradients are accumulated at the visual encoder output;
- Vision Recomputation & Backward: We re-compute the vision encoder forward pass, followed by a backward pass to compute gradients for parameters in the vision encoder;
DEP not only achieves load-balance, but also decouples the optimization strategy of the vision encoder and the main backbone. K2.5 seamlessly inherits the parallel strategy of K2, achieving a multimodal training efficiency of 90% relative to text-only training. We note a concurrent work, LongCat-Flash-Omni [55], shares a similar design philosophy.
5 Evaluations
5.1 Main Results
5.1.1 Evaluation Settings
Benchmarks
We evaluate Kimi K2.5 on a comprehensive benchmark suite spanning text-based reasoning, competitive and agentic coding, multimodal understanding (image and video), autonomous agentic execution, and computer use. Our benchmark taxonomy is organized along the following capability axes:
- Reasoning & General: Humanity’s Last Exam (HLE) [46], AIME 2025 [40], HMMT 2025 (Feb) [58], IMO-AnswerBench [36], GPQA-Diamond [47], MMLU-Pro [64], SimpleQA Verified [21], AdvancedIF [22], and LongBench v2 [8].
- Coding: SWE-Bench Verified [28], SWE-Bench Pro (public) [15], SWE-Bench Multilingual [28], Terminal Bench 2.0 [38], PaperBench (CodeDev) [52], CyberGym [66], SciCode [56], OJBench (cpp) [65], and LiveCodeBench (v6) [27].
- Agentic Capabilities: BrowseComp [68], WideSearch [69],DeepSearchQA [60], FinSearchComp (T2&T3) [25], Seal-0 [45], GDPVal [43].
- Image Understanding: (math & reasoning) MMMU-Pro [76], MMMU (val) [75], CharXiv (RQ) [67], MathVision [61] and MathVista (mini) [35]; (vision knowledge) SimpleVQA [12] and WorldVQA https://github.com/MoonshotAI/WorldVQA; (perception) ZeroBench (w/ and w/o tools) [48], BabyVision [11], BLINK [17] and MMVP [57]; (OCR & document) OCRBench [34], OmniDocBench 1.5 [42] and InfoVQA [37].
- Video Understanding: VideoMMMU [24], MMVU [79], MotionBench [23], Video-MME [16] (with subtitles), LongVideoBench [70], and LVBench [62].
- Computer Use: OSWorld-Verified [72, 73], and WebArena [80].
Table 4: Performance comparison of Kimi K2.5 against open-source and proprietary models. Bold denotes the global SOTA; Data points marked with * are taken from our internal evaluations. † refers to their scores of text-only subset.
| | | Proprietary | Open Source | | | |
| --- | --- | --- | --- | --- | --- | --- |
| Benchmark | Kimi K2.5 | Claude Opus 4.5 | GPT-5.2 (xhigh) | Gemini 3 Pro | DeepSeek-V3.2 | Qwen3-VL-235B-A22B |
| Reasoning & General | | | | | | |
| HLE-Full | 30.1 | 30.8 | 34.5 | 37.5 | 25.1 † | - |
| HLE-Full w/ tools | 50.2 | 43.2 | 45.5 | 45.8 | 40.8 † | - |
| AIME 2025 | 96.1 | 92.8 | 100 | 95.0 | 93.1 | - |
| HMMT 2025 (Feb) | 95.4 | 92.9* | 99.4 | 97.3* | 92.5 | - |
| IMO-AnswerBench | 81.8 | 78.5* | 86.3 | 83.1* | 78.3 | - |
| GPQA-Diamond | 87.6 | 87.0 | 92.4 | 91.9 | 82.4 | - |
| MMLU-Pro | 87.1 | 89.3* | 86.7* | 90.1 | 85.0 | - |
| SimpleQA Verified | 36.9 | 44.1 | 38.9 | 72.1 | 27.5 | - |
| AdvancedIF | 75.6 | 63.1 | 81.1 | 74.7 | 58.8 | - |
| LongBench v2 | 61.0 | 64.4* | 54.5* | 68.2* | 59.8* | - |
| Coding | | | | | | |
| SWE-Bench Verified | 76.8 | 80.9 | 80.0 | 76.2 | 73.1 | - |
| SWE-Bench Pro (public) | 50.7 | 55.4* | 55.6 | - | - | - |
| SWE-Bench Multilingual | 73.0 | 77.5 | 72.0 | 65.0 | 70.2 | - |
| Terminal Bench 2.0 | 50.8 | 59.3 | 54.0 | 54.2 | 46.4 | - |
| PaperBench (CodeDev) | 63.5 | 72.9* | 63.7* | - | 47.1 | - |
| CyberGym | 41.3 | 50.6 | - | 39.9* | 17.3* | - |
| SciCode | 48.7 | 49.5 | 52.1 | 56.1 | 38.9 | - |
| OJBench (cpp) | 57.4 | 54.6* | - | 68.5* | 54.7* | - |
| LiveCodeBench (v6) | 85.0 | 82.2* | - | 87.4* | 83.3 | - |
| Agentic | | | | | | |
| BrowseComp | 60.6 | 37.0 | 65.8 | 37.8 | 51.4 | - |
| BrowseComp (w/ ctx manage) | 74.9 | 57.8 | | 59.2 | 67.6 | - |
| BrowseComp (Agent Swarm) | 78.4 | - | - | - | - | - |
| WideSearch | 72.7 | 76.2* | - | 57.0 | 32.5* | - |
| WideSearch (Agent Swarm) | 79.0 | - | - | - | - | - |
| DeepSearchQA | 77.1 | 76.1* | 71.3* | 63.2* | 60.9* | - |
| FinSearchCompT2&T3 | 67.8 | 66.2* | - | 49.9 | 59.1* | - |
| Seal-0 | 57.4 | 47.7* | 45.0 | 45.5* | 49.5* | - |
| GDPVal-AA | 41.0 | 45.0 | 48.0 | 35.0 | 34.0 | - |
| Image | | | | | | |
| MMMU-Pro | 78.5 | 74.0 | 79.5* | 81.0 | - | 69.3 |
| MMMU (val) | 84.3 | 80.7 | 86.7* | 87.5* | - | 80.6 |
| CharXiv (RQ) | 77.5 | 67.2* | 82.1 | 81.4 | - | 66.1 |
| MathVision | 84.2 | 77.1* | 83.0 | 86.1* | - | 74.6 |
| MathVista (mini) | 90.1 | 80.2* | 82.8* | 89.8* | - | 85.8 |
| SimpleVQA | 71.2 | 69.7* | 55.8* | 69.7* | - | 56.8* |
| WorldVQA | 46.3 | 36.8 | 28.0 | 47.4 | - | 23.5 |
| ZeroBench | 9 | 3* | 9* | 8* | - | 4* |
| ZeroBench w/ tools | 11 | 9* | 7* | 12* | - | 3* |
| BabyVision | 36.5 | 14.2 | 34.4 | 49.7 | - | 22.2 |
| BLINK | 78.9 | 68.8* | - | 78.7* | - | 68.9 |
| MMVP | 87.0 | 80.0* | 83.0* | 90.0* | - | 84.3 |
| OmniDocBench 1.5 | 88.8 | 87.7* | 85.7 | 88.5 | - | 82.0* |
| OCRBench | 92.3 | 86.5* | 80.7* | 90.3* | - | 87.5 |
| InfoVQA (test) | 92.6 | 76.9* | 84* | 57.2* | - | 89.5 |
| Video | | | | | | |
| VideoMMMU | 86.6 | 84.4* | 85.9 | 87.6 | - | 80.0 |
| MMVU | 80.4 | 77.3* | 80.8* | 77.5* | - | 71.1 |
| MotionBench | 70.4 | 60.3* | 64.8* | 70.3 | - | - |
| Video-MME | 87.4 | 77.6* | 86.0* | 88.4* | - | 79.0 |
| LongVideoBench | 79.8 | 67.2* | 76.5* | 77.7* | - | 65.6* |
| LVBench | 75.9 | 57.3 | - | 73.5* | - | 63.6 |
| Computer Use | | | | | | |
| OSWorld-Verified | 63.3 | 66.3 | 8.6* | 20.7* | - | 38.1 |
| WebArena | 58.9 | 63.4 * | - | - | - | 26.4* |
Table 5: Performance and token efficiency of some reasoning models. Average output token counts (in thousands) are shown in parentheses.
| Benchmark | Kimi K2.5 | Kimi K2 | Gemini-3.0 | DeepSeek-V3.2 |
| --- | --- | --- | --- | --- |
| Thinking | Pro | Thinking | | |
| AIME 2025 | 96.1 (25k) | 94.5 (30k) | 95.0 (15k) | 93.1 (16k) |
| HMMT Feb 2025 | 95.4 (27k) | 89.4 (35k) | 97.3 (16k) | 92.5 (19k) |
| HMMT Nov 2025 | 91.1 (24k) | 89.2 (32k) | 94.5 (15k) | 90.2 (18k) |
| IMO-AnswerBench | 81.8 (36k) | 78.6 (37k) | 83.1 (18k) | 78.3 (27k) |
| LiveCodeBench | 85.0 (18k) | 82.6 (25k) | 87.4 (13k) | 83.3 (16k) |
| GPQA Diamond | 87.6 (14k) | 84.5 (13k) | 91.9 (8k) | 82.4 (7k) |
| HLE-Text | 31.5 (24k) | 23.9 (29k) | 38.4 (13k) | 25.1 (21k) |
Baselines
We benchmark against state-of-the-art proprietary and open-source models. For proprietary models, we compare against Claude Opus 4.5 (with extended thinking) [4], GPT-5.2 (with xhigh reasoning effort) [41], and Gemini 3 Pro (with high reasoning-level) [19]. For open-source models, we include DeepSeek-V3.2 (with thinking mode enabled) [13] for text benchmarks, while vision benchmarks report Qwen3-VL-235B-A22B-Thinking [7] instead.
Evaluation Configurations
Unless otherwise specified, all Kimi K2.5 evaluations use temperature = 1.0, top-p = 0.95, and a context length of 256k tokens. Benchmarks without publicly available scores were re-evaluated under identical conditions and marked with an asterisk (*). The full evaluation settings can be found in appendix E.
5.1.2 Evaluation Results
Comprehensive results comparing Kimi K2.5 against proprietary and open-source baselines are presented in Table 4. We highlight key observations across core capability domains:
Reasoning and General
Kimi K2.5 achieves competitive performance with top-tier proprietary models on rigorous STEM benchmarks. On Math tasks, AIME 2025, K2.5 scores 96.1%, approaching GPT-5.2’s perfect score while outperforming Claude Opus 4.5 (92.8%) and Gemini 3 Pro (95.0%). This high-level performance extends to the HMMT 2025 (95.4%) and IMO-AnswerBench (81.8%), demonstrating K2.5’s superior reasoning depth. Kimi K2.5 also exhibits remarkable knowledge and scientific reasoning capabilities, scoring 36.9% on SimpleQA Verified, 87.1% on MMLU-Pro and 87.6% on GPQA. Notably, on HLE without the use of tools, K2.5 achieves an HLE-Full score of 30.1%, with component-wise scores of 31.5% on text subset and 21.3% on image subset. When tool-use is enabled, K2.5’s HLE-Full score rises to 50.2%, with 51.8% (text) and 39.8% (image), significantly outperforming Gemini 3 Pro (45.8%) and GPT-5.2 (45.5%). In addition to reasoning and knowledge, K2.5 shows strong instruction-following performance (75.6% on AdvancedIF) and competitive long-context abilities, achieving 61.0% on LongBench v2 compared to both proprietary and open-source models.
Complex Coding and Software Engineering
Kimi K2.5 exhibits strong software engineering capabilities, especially on realistic coding and maintenance tasks. It achieves 76.8% on SWE-Bench Verified and 73.0% on SWE-Bench Multilingual, outperforming Gemini 3 Pro while remaining competitive with Claude Opus 4.5 and GPT‑5.2. On LiveCodeBench v6, Kimi K2.5 reaches 85.0%, surpassing DeepSeek‑V3.2 (83.3%) and Claude Opus 4.5 (82.2%), highlighting its robustness on live, continuously updated coding challenges. On TerminalBench 2.0, PaperBench, and SciCode, it scores 50.8%, 63.5%, and 48.7% respectively, demonstrating stable competition‑level performance in automated software engineering and problem solving across diverse domains. In addition, K2.5 attains a score of 41.3 on CyberGym, on the task of finding previously discovered vulnerabilities in real open‑source software projects given only a high‑level description of the weakness, further underscoring its effectiveness in security‑oriented software analysis.
Agentic Capabilities
Kimi K2.5 establishes new state-of-the-art performance on complex agentic search and browsing tasks. On BrowseComp, K2.5 achieves 60.6% without context management techniques, 74.9% with Discard-all context management [13] — substantially outperforming GPT-5.2’s reported 65.8%, Claude Opus 4.5 (37.0%) and Gemini 3 Pro (37.8%). Similarly, WideSearch reaches 72.7% on item-f1. On DeepSearchQA (77.1%), FinSearchCompT2&T3 (67.8%) and Seal-0 (57.4%), K2.5 leads all evaluated models, demonstrating superior capacity for agentic deep research, information synthesis, and multi-step tool orchestration.
Vision Reasoning, Knowledge and Perception
Kimi K2.5 demonstrates strong visual reasoning and world knowledge capabilities. It scores 78.5% on MMMU-Pro, spanning multi-disciplinary multimodal tasks. For world knowledge question answering, K2.5 achieves 71.2% on SimpleVQA and 46.3% on WorldVQA. For visual reasoning, it achieves 84.2% on MathVision, 90.1% on MathVista (mini), and 36.5% on BabyVision. For OCR and document understanding, K2.5 delivers outstanding results with 77.5% on CharXiv (RQ), 92.3% on OCRBench, 88.8% on OmniDocBench 1.5, and 92.6% on InfoVQA (test). On the challenging ZeroBench, Kimi K2.5 achieves 9% and 11% with tool augmentation, substantially ahead of competing models. On basic visual perception benchmarks BLINK (78.9%) and MMVP (87.0%), we also observe competitive performance of Kimi K2.5, demonstrating its robust real-world visual perceptions.
Video Understanding
Kimi K2.5 achieves state-of-the-art performance across diverse video understanding tasks. It attains 86.6% on VideoMMMU and 80.4% on MMVU, rivaling frontier leaderships. With the context-compression and dense temporal understanding abilities of MoonViT-3D, Kimi K2.5 also establishes new global SOTA records in long-video comprehension with 75.9% on LVBench and 79.8% on LongVideoBench by feeding over 2,000 frames, while demonstrating robust dense-motion understanding at 70.4% on the highly-dimensional MotionBench.
Computer-Use Capability
Kimi K2.5 demonstrates state-of-the-art computer-use capability on real-world tasks. On the computer-use benchmark OSWorld-Verified [72, 73], it achieves a 63.3% success rate relying solely on GUI actions without external tools. This substantially outperforms open-source models such as Qwen3-VL-235B-A22B (38.1%) and OpenAI’s computer-use agent framework Operator (o3-based) (42.9%), while remaining competitive with the current leading CUA model, Claude Opus 4.5 (66.3%). On WebArena [80], an established benchmark for GUI-based web browsing, Kimi K2.5 achieves a 58.9% success rate, surpassing OpenAI’s Operator (58.1%) and approaching the performance of Claude Opus 4.5 (63.4%).
5.2 Agent Swarm Results
Benchmarks
To rigorously evaluate the effectiveness of the agent swarm framework, we select three representative benchmarks that collectively cover deep reasoning, large-scale retrieval, and real-world complexity:
- BrowseComp: A challenging deep-research benchmark that requires multi-step reasoning and complex information synthesis.
- WideSearch: A benchmark designed to evaluate the ability to perform broad, multi-step information seeking and reasoning across diverse sources.
- In-house Swarm Bench: An internally developed Swarm benchmark, designed to evaluate the agent swarm performance under real-world, high-complexity conditions. It covers four domains: WildSearch (unconstrained, real-world information retrieval over the open web), Batch Download (large-scale acquisition of diverse resources), WideRead (large-scale document comprehension involving more than 100 input documents), and Long-Form Writing (coherent generation of extensive content exceeding 100k words). This benchmark incorporates extreme-scale scenarios that stress-test the orchestration, scalability, and coordination capabilities of agent-based systems.
Table 6: Performance comparison of Kimi K2.5 Agent Swarm against single-agent and proprietary baselines on agentic search benchmarks. Bold denotes the best result per benchmark.
| Benchmark | K2.5 Agent Swarm | Kimi K2.5 | Claude Opus 4.5 | GPT-5.2 | GPT-5.2 Pro |
| --- | --- | --- | --- | --- | --- |
| BrowseComp | 78.4 | 60.6 | 37.0 | 65.8 | 77.9 |
| WideSearch | 79.0 | 72.7 | 76.2 | - | - |
| In-house Swarm Bench | 58.3 | 41.6 | 45.8 | - | - |
Performance
Table 6 presents the performance of Kimi K2.5 Agent Swarm against single-agent configurations and proprietary baselines. The results demonstrate substantial performance improvements from multi-agent orchestration. On BrowseComp, Agent Swarm achieves 78.4%, representing a 17.8% absolute gain over the single-agent K2.5 (60.6%) and surpassing even GPT-5.2 Pro (77.9%). Similarly, WideSearch sees a 6.3% improvement (72.7% $→$ 79.0%) on Item-F1, enabling K2.5 Agent Swarm to outperform Claude Opus 4.5 (76.2%) and establish a new state-of-the-art. The gains are most pronounced on In-house Swarm bench (16.7%), where tasks are explicitly designed to reward parallel decomposition. These consistent improvements across benchmarks validate that Agent Swarm effectively converts computational parallelism into qualitative capability gains, particularly for problems requiring broad exploration, multi-source verification, or simultaneous handling of independent sub-tasks.
<details>
<summary>x4.png Details</summary>

### Visual Description
\n
## Word Cloud: Researcher Specializations
### Overview
The image is a word cloud composed of various terms related to research roles and specializations. The size of each word corresponds to its frequency within the cloud, with larger words appearing more often. The color scheme is predominantly black text on a white background. There is no clear numerical data or axes; it's a visual representation of term prominence.
### Components/Axes
There are no axes or formal components in the traditional sense of a chart or diagram. The "components" are the individual words themselves, representing different research specializations. The visual arrangement is non-linear and organic, typical of word clouds.
### Detailed Analysis or Content Details
The following is a list of the terms present in the word cloud, with an approximate assessment of their relative size (and therefore frequency). Note that precise counts are difficult due to overlapping and varying font sizes.
* **Researcher** (Very Large, appears multiple times, central)
* **Biography** (Large, appears multiple times)
* **Verification** (Large, appears multiple times)
* **Historical** (Large)
* **Timeline** (Medium-Large)
* **Cross Reference** (Medium-Large)
* **Publication** (Medium)
* **University** (Medium)
* **Award** (Small-Medium)
* **Thesis** (Small-Medium)
* **Location** (Small-Medium)
* **Article** (Small-Medium)
* **Book** (Medium)
* **Analyst** (Small-Medium)
* **Specialist** (Medium)
* **Investigator** (Medium)
* **Academic Researcher** (Small)
* **Article Finder** (Small)
* **Biographical Researcher** (Small)
* **Blog Researcher** (Small)
* **Company Researcher** (Small)
* **Comprehensive Researcher** (Small)
* **Country Identifier** (Small)
* **Citation Manager** (Small)
* **Data Verifier** (Small)
* **Director Researcher** (Small)
* **Education Researcher** (Small)
* **Film Researcher** (Small)
* **Financial Analyst** (Small)
* **Genealogy Researcher** (Small)
* **Geography Specialist** (Small)
* **Journal Identifier** (Small)
* **Literary Researcher** (Small)
* **Location Specialist** (Small)
* **Media Researcher** (Small)
* **Music Researcher** (Small)
* **Paper Searcher** (Small)
* **Relationship Investigator** (Small)
* **Sports Researcher** (Small)
* **Timeline Investigator** (Small)
* **Verifer** (Small)
* **Writer** (Small)
### Key Observations
The most prominent terms are "Researcher," "Biography," "Verification," and "Historical," suggesting a strong focus on these areas. The repetition of "Researcher" indicates it's the overarching theme. The presence of terms like "Timeline," "Cross Reference," and "Verification" suggests an emphasis on accuracy and detailed investigation. The inclusion of "University" and "Thesis" points to an academic context.
### Interpretation
The word cloud visually represents the diverse range of specializations within the broader field of research. The size of each term reflects its relative importance or frequency of occurrence, potentially within a specific dataset or context (which is not provided). The cloud suggests that research is not a monolithic activity but encompasses a wide array of skills and areas of expertise. The emphasis on "Biography," "Historical," and "Verification" could indicate a particular focus on historical accuracy and biographical investigation, or it could simply reflect the composition of the source material used to generate the cloud. The lack of quantitative data limits a deeper analysis, but the visual representation effectively conveys the breadth and complexity of the research landscape. It's a qualitative visualization, designed to highlight key themes rather than present precise measurements.
</details>
Figure 6: The word cloud visualizes heterogeneous K2.5-based sub-agents dynamically instantiated by the Orchestrator across tests.
<details>
<summary>x5.png Details</summary>
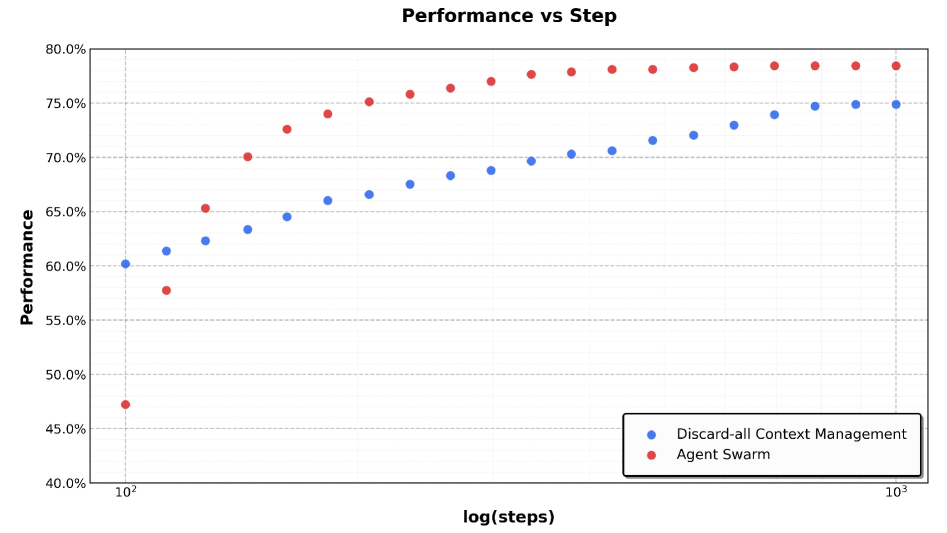
### Visual Description
## Scatter Plot: Performance vs Step
### Overview
The image presents a scatter plot illustrating the relationship between performance and the logarithm of steps taken. Two distinct data series are plotted, representing "Discard-all Context Management" and "Agent Swarm" approaches. The x-axis represents the log of steps, ranging from approximately 10^2 to 10^3, while the y-axis represents performance, ranging from approximately 40% to 80%.
### Components/Axes
* **Title:** "Performance vs Step" - positioned at the top-center of the chart.
* **X-axis Label:** "log(steps)" - positioned at the bottom-center of the chart. The scale is logarithmic, with markers at 10^2 and 10^3.
* **Y-axis Label:** "Performance" - positioned at the left-center of the chart. The scale is linear, ranging from 40.0% to 80.0% with increments of 5.0%.
* **Legend:** Located at the bottom-right corner of the chart.
* "Discard-all Context Management" - represented by blue circles.
* "Agent Swarm" - represented by red circles.
* **Gridlines:** Horizontal gridlines are present, aiding in reading the performance values.
### Detailed Analysis
**Discard-all Context Management (Blue Circles):**
The blue data series shows a generally upward trend, but with diminishing returns. Initially, the performance increases more rapidly, then plateaus.
* At log(steps) ≈ 10^2 (approximately 100), performance is approximately 61%.
* At log(steps) ≈ 150, performance is approximately 63%.
* At log(steps) ≈ 200, performance is approximately 65%.
* At log(steps) ≈ 300, performance is approximately 67%.
* At log(steps) ≈ 400, performance is approximately 69%.
* At log(steps) ≈ 500, performance is approximately 70%.
* At log(steps) ≈ 600, performance is approximately 71%.
* At log(steps) ≈ 700, performance is approximately 72%.
* At log(steps) ≈ 800, performance is approximately 73%.
* At log(steps) ≈ 900, performance is approximately 74%.
* At log(steps) ≈ 10^3 (approximately 1000), performance is approximately 75%.
**Agent Swarm (Red Circles):**
The red data series shows a rapid initial increase in performance, followed by a plateau at a higher performance level than the blue series.
* At log(steps) ≈ 10^2 (approximately 100), performance is approximately 44%.
* At log(steps) ≈ 120, performance is approximately 55%.
* At log(steps) ≈ 150, performance is approximately 64%.
* At log(steps) ≈ 200, performance is approximately 70%.
* At log(steps) ≈ 250, performance is approximately 73%.
* At log(steps) ≈ 300, performance is approximately 75%.
* From log(steps) ≈ 300 to 10^3, performance remains relatively stable, fluctuating between approximately 75% and 78%.
* At log(steps) ≈ 10^3 (approximately 1000), performance is approximately 78%.
### Key Observations
* The "Agent Swarm" approach consistently outperforms the "Discard-all Context Management" approach across the entire range of steps.
* Both approaches exhibit diminishing returns in performance as the number of steps increases.
* The "Agent Swarm" approach shows a more significant initial performance gain compared to the "Discard-all Context Management" approach.
* The "Agent Swarm" approach reaches a performance plateau much earlier than the "Discard-all Context Management" approach.
### Interpretation
The data suggests that the "Agent Swarm" approach is more effective at achieving higher performance levels, particularly in the initial stages of the process. However, both approaches eventually reach a point of diminishing returns, indicating that further increasing the number of steps does not significantly improve performance. The logarithmic scale on the x-axis implies that the cost of each additional step increases as the number of steps grows, and the performance gains do not justify the increased cost beyond a certain point. The plateau observed in both series could indicate a fundamental limit to the performance achievable with these approaches, or it could suggest that other factors are becoming limiting. The difference in the initial performance gain between the two approaches suggests that the "Agent Swarm" approach is better at leveraging early information or adapting to the task at hand. The consistent outperformance of "Agent Swarm" suggests it is a more robust strategy.
</details>
Figure 7: Comparison of Kimi K2.5 performance under Agent Swarm and Discard-all context management in BrowseComp.
<details>
<summary>x6.png Details</summary>
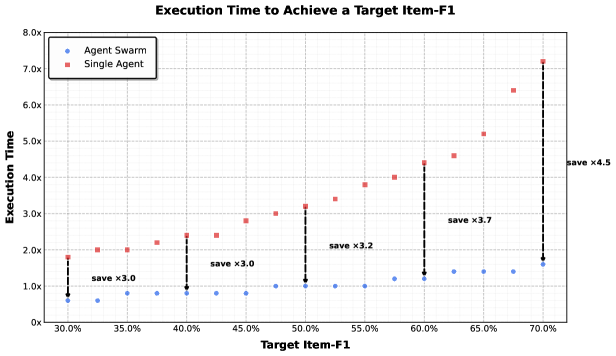
### Visual Description
## Scatter Plot: Execution Time to Achieve a Target Item-F1
### Overview
This scatter plot compares the execution time of an "Agent Swarm" versus a "Single Agent" in achieving a target item-F1, across a range of target item-F1 percentages. The x-axis represents the Target Item-F1 percentage, and the y-axis represents the Execution Time, scaled as a multiple of some base unit (denoted as "x"). Vertical lines with "save x[value]" labels are present at several points, potentially indicating save points or checkpoints during the execution.
### Components/Axes
* **Title:** "Execution Time to Achieve a Target Item-F1" (Top-center)
* **X-axis Label:** "Target Item-F1" (Bottom-center). Scale ranges from approximately 30% to 70%, with markers at 30%, 35%, 40%, 45%, 50%, 55%, 60%, 65%, and 70%.
* **Y-axis Label:** "Execution Time" (Left-center). Scale ranges from 0x to 8x, with markers at 0x, 1x, 2x, 3x, 4x, 5x, 6x, 7x, and 8x.
* **Legend:** Located in the top-left corner.
* "Agent Swarm" - Represented by blue circles.
* "Single Agent" - Represented by red crosses.
* **Save Markers:** Vertical black lines with labels "save x[value]" at approximately 30%, 40%, 50%, 55%, 60%, and 70% on the x-axis.
### Detailed Analysis
**Agent Swarm (Blue Circles):**
The Agent Swarm data points generally cluster below the Single Agent data points.
* At 30% Target Item-F1: Approximately 0.7x.
* At 35% Target Item-F1: Approximately 0.8x.
* At 40% Target Item-F1: Approximately 0.9x.
* At 45% Target Item-F1: Approximately 1.0x.
* At 50% Target Item-F1: Approximately 1.1x.
* At 55% Target Item-F1: Approximately 1.2x.
* At 60% Target Item-F1: Approximately 1.1x.
* At 65% Target Item-F1: Approximately 1.2x.
* At 70% Target Item-F1: Approximately 1.3x.
**Single Agent (Red Crosses):**
The Single Agent data points are generally higher in execution time than the Agent Swarm.
* At 30% Target Item-F1: Approximately 1.8x. Labeled "save x3.0".
* At 35% Target Item-F1: Approximately 2.2x.
* At 40% Target Item-F1: Approximately 2.4x. Labeled "save x3.0".
* At 45% Target Item-F1: Approximately 2.8x.
* At 50% Target Item-F1: Approximately 3.0x. Labeled "save x3.0".
* At 55% Target Item-F1: Approximately 3.4x. Labeled "save x3.2".
* At 60% Target Item-F1: Approximately 4.4x. Labeled "save x3.7".
* At 65% Target Item-F1: Approximately 6.4x.
* At 70% Target Item-F1: Approximately 4.5x. Labeled "save x4.5".
### Key Observations
* The Agent Swarm consistently demonstrates lower execution times compared to the Single Agent across all Target Item-F1 percentages.
* The Single Agent's execution time appears to increase more rapidly than the Agent Swarm's as the Target Item-F1 percentage increases, particularly between 60% and 65%.
* The "save" markers suggest periodic saving of the execution state, and the associated "x[value]" indicates the execution time at the point of saving.
* The execution time of the Single Agent at 70% is significantly lower than at 65%, which is an anomaly.
### Interpretation
The data strongly suggests that utilizing an Agent Swarm approach results in significantly faster execution times for achieving the target item-F1 compared to using a Single Agent. This difference becomes more pronounced as the target percentage increases, indicating that the benefits of the swarm approach scale with the complexity of the task. The "save" markers provide insight into the execution process, allowing for potential rollback or resumption from specific points. The anomaly at 70% for the Single Agent could indicate a successful optimization or a different execution path taken at that specific target percentage, or potentially an error in data recording. The consistent lower execution times of the Agent Swarm suggest a more efficient algorithm or parallel processing capability. The plot demonstrates the effectiveness of a distributed approach (Agent Swarm) over a centralized one (Single Agent) in this specific task.
</details>
Figure 8: Agent Swarm achieves 3 $×$ –4.5 $×$ faster execution time compared to single-agent baselines as target Item-F1 increases from 30% to 70% in WideSearch testing.
Execution Time Savings via Parallelism
Beyond improved task performance, Agent Swarm achieves substantial wall-clock time reductions through parallel subagent execution. On the WideSearch benchmark, it reduces the execution time required to reach target performance by 3 $×\sim$ 4.5 $×$ compared to a single-agent baseline. As shown in Figure 8, this efficiency gain scales with task complexity: as the target Item-F1 increases from 30% to 70%, the single agent’s execution time grows from approximately 1.8 $×$ to over 7.0 $×$ the baseline, whereas Agent Swarm maintains near-constant low latency in the range of $0.6×\sim 1.6×$ . These results indicate that Agent Swarm effectively transforms sequential tool invocations into parallel operations, preventing the linear growth in completion time typically observed as task difficulty increases.
Dynamic Subagent Creation and Scheduling
Within an agent swarm, subagents are dynamically instantiated rather than pre-defined. Through PARL, the orchestrator learns adaptive policies to create and schedule self-hosted subagents in response to evolving task structures and problem states. Unlike static decomposition approaches, this learned policy enables the Orchestrator to reason about the requisite number, timing, and specialization of subagents based on query. Consequently, a heterogeneous agent group emerges organically from this adaptive allocation strategy (Figure 7).
Agent Swarm as Proactive Context Management
Beyond better performance and runtime acceleration, an agent swarm is a kind of proactive and intelligent context management enabled by multi-agent architecture [6]. This approach differs from test-time context truncation strategies such as Hide-Tool-Result [2], Summary [71], or Discard-all [13], which react to context overflow by compressing or discarding accumulated histories. While effective at reducing token usage, these methods are inherently reactive and often sacrifice structural information or intermediate reasoning.
In contrast, Agent Swarm enables proactive context control through explicit orchestration. Long-horizon tasks are decomposed into parallel, semantically isolated subtasks, each executed by a specialized subagent with a bounded local context. Crucially, these subagents maintain independent working memories and perform local reasoning without directly mutating or contaminating the global context of the central orchestrator. Only task-relevant outputs—rather than full interaction traces—are selectively routed back to the orchestrator. This design induces context sharding rather than context truncation, allowing the system to scale effective context length along an additional architectural dimension while preserving modularity, information locality, and reasoning integrity.
As shown in Figure 7, this proactive strategy outperforms Discard-all in both efficiency and accuracy on BrowseComp. By preserving task-level coherence at the orchestrator level while keeping subagent contexts tightly bounded, Agent Swarm enables parallel execution with selective context persistence, retaining only high-level coordination signals or essential intermediate results. Consequently, Agent Swarm operates as an active, structured context manager, achieving higher accuracy with substantially fewer critical steps than uniform context truncation.
6 Conclusions
Kimi K2.5 shows that scalable and general agentic intelligence can be achieved through joint optimization of text and vision together with parallel agent execution. By unifying language and vision across pre-training and reinforcement learning, the model achieves strong cross-modal alignment and visual–text reasoning. Agent Swarm enables concurrent execution of heterogeneous sub-tasks, reducing inference latency while improving performance on complex agentic workloads. Grounded in vision–text intelligence and agent swarms, Kimi K2.5 demonstrates strong performance on benchmarks and real-world tasks. By open-sourcing the post-trained checkpoints, we aim to support the open-source community in building scalable and general-purpose agentic systems and to accelerate progress toward General Agentic Intelligence.
References
- [1] M. AI (2025) Introducing kimi k2 thinking. External Links: Link Cited by: §1, §1, §4.4.2.
- [2] M. AI (2025) Kimi-researcher end-to-end rl training for emerging agentic capabilities. External Links: Link Cited by: §1, §5.2.
- [3] Amazon Web Services (2023) Amazon simple storage service (amazon s3). Note: WebAvailable at: https://aws.amazon.com/s3/ External Links: Link Cited by: §C.1.
- [4] Anthropic (2025) Claude opus 4.5 system card. External Links: Link Cited by: §E.7, §1, §3, §5.1.1.
- [5] Anthropic (2025) How we built our multi-agent research system. External Links: Link Cited by: §3.
- [6] Anthropic (2026) Building multi-agent systems: when and how to use them. External Links: Link Cited by: §3, §5.2.
- [7] S. Bai, Y. Cai, R. Chen, K. Chen, X. Chen, Z. Cheng, L. Deng, W. Ding, C. Gao, C. Ge, W. Ge, Z. Guo, Q. Huang, J. Huang, F. Huang, B. Hui, S. Jiang, Z. Li, M. Li, M. Li, K. Li, Z. Lin, J. Lin, X. Liu, J. Liu, C. Liu, Y. Liu, D. Liu, S. Liu, D. Lu, R. Luo, C. Lv, R. Men, L. Meng, X. Ren, X. Ren, S. Song, Y. Sun, J. Tang, J. Tu, J. Wan, P. Wang, P. Wang, Q. Wang, Y. Wang, T. Xie, Y. Xu, H. Xu, J. Xu, Z. Yang, M. Yang, J. Yang, A. Yang, B. Yu, F. Zhang, H. Zhang, X. Zhang, B. Zheng, H. Zhong, J. Zhou, F. Zhou, J. Zhou, Y. Zhu, and K. Zhu (2025) Qwen3-vl technical report. External Links: 2511.21631, Link Cited by: §1, §2.1, §2.2, §5.1.1.
- [8] Y. Bai, S. Tu, J. Zhang, H. Peng, X. Wang, X. Lv, S. Cao, J. Xu, L. Hou, Y. Dong, J. Tang, and J. Li (2025) LongBench v2: towards deeper understanding and reasoning on realistic long-context multitasks. External Links: 2412.15204, Link Cited by: §E.3, 1st item.
- [9] G. Brockman, V. Cheung, L. Pettersson, J. Schneider, J. Schulman, J. Tang, and W. Zaremba (2016) OpenAI gym. External Links: 1606.01540, Link Cited by: Appendix D.
- [10] T. B. Brown, B. Mann, N. Ryder, M. Subbiah, J. Kaplan, P. Dhariwal, A. Neelakantan, P. Shyam, G. Sastry, A. Askell, S. Agarwal, A. Herbert-Voss, G. Krueger, T. Henighan, R. Child, A. Ramesh, D. M. Ziegler, J. Wu, C. Winter, C. Hesse, M. Chen, E. Sigler, M. Litwin, S. Gray, B. Chess, J. Clark, C. Berner, S. McCandlish, A. Radford, I. Sutskever, and D. Amodei (2020) Language models are few-shot learners. External Links: 2005.14165, Link Cited by: §B.3.
- [11] L. Chen, W. Xie, Y. Liang, H. He, H. Zhao, Z. Yang, Z. Huang, H. Wu, H. Lu, Y. charles, Y. Bao, Y. Fan, G. Li, H. Shen, X. Chen, W. Xu, S. Si, Z. Cai, W. Chai, Z. Huang, F. Liu, T. Liu, B. Chang, X. Hu, K. Chen, Y. Ren, Y. Liu, Y. Gong, and K. Li (2026) BabyVision: visual reasoning beyond language. External Links: 2601.06521, Link Cited by: 4th item.
- [12] X. Cheng, W. Zhang, S. Zhang, J. Yang, X. Guan, X. Wu, X. Li, G. Zhang, J. Liu, Y. Mai, Y. Zeng, Z. Wen, K. Jin, B. Wang, W. Zhou, Y. Lu, T. Li, W. Huang, and Z. Li (2025) SimpleVQA: multimodal factuality evaluation for multimodal large language models. External Links: 2502.13059, Link Cited by: 4th item.
- [13] DeepSeek-AI, A. Liu, A. Mei, B. Lin, B. Xue, B. Wang, B. Xu, B. Wu, B. Zhang, C. Lin, C. Dong, C. Lu, C. Zhao, C. Deng, C. Xu, C. Ruan, D. Dai, D. Guo, D. Yang, D. Chen, E. Li, F. Zhou, F. Lin, F. Dai, G. Hao, G. Chen, G. Li, H. Zhang, H. Xu, H. Li, H. Liang, H. Wei, H. Zhang, H. Luo, H. Ji, H. Ding, H. Tang, H. Cao, H. Gao, H. Qu, H. Zeng, J. Huang, J. Li, J. Xu, J. Hu, J. Chen, J. Xiang, J. Yuan, J. Cheng, J. Zhu, J. Ran, J. Jiang, J. Qiu, J. Li, J. Song, K. Dong, K. Gao, K. Guan, K. Huang, K. Zhou, K. Huang, K. Yu, L. Wang, L. Zhang, L. Wang, L. Zhao, L. Yin, L. Guo, L. Luo, L. Ma, L. Wang, L. Zhang, M. S. Di, M. Y. Xu, M. Zhang, M. Zhang, M. Tang, M. Zhou, P. Huang, P. Cong, P. Wang, Q. Wang, Q. Zhu, Q. Li, Q. Chen, Q. Du, R. Xu, R. Ge, R. Zhang, R. Pan, R. Wang, R. Yin, R. Xu, R. Shen, R. Zhang, S. H. Liu, S. Lu, S. Zhou, S. Chen, S. Cai, S. Chen, S. Hu, S. Liu, S. Hu, S. Ma, S. Wang, S. Yu, S. Zhou, S. Pan, S. Zhou, T. Ni, T. Yun, T. Pei, T. Ye, T. Yue, W. Zeng, W. Liu, W. Liang, W. Pang, W. Luo, W. Gao, W. Zhang, X. Gao, X. Wang, X. Bi, X. Liu, X. Wang, X. Chen, X. Zhang, X. Nie, X. Cheng, X. Liu, X. Xie, X. Liu, X. Yu, X. Li, X. Yang, X. Li, X. Chen, X. Su, X. Pan, X. Lin, X. Fu, Y. Q. Wang, Y. Zhang, Y. Xu, Y. Ma, Y. Li, Y. Li, Y. Zhao, Y. Sun, Y. Wang, Y. Qian, Y. Yu, Y. Zhang, Y. Ding, Y. Shi, Y. Xiong, Y. He, Y. Zhou, Y. Zhong, Y. Piao, Y. Wang, Y. Chen, Y. Tan, Y. Wei, Y. Ma, Y. Liu, Y. Yang, Y. Guo, Y. Wu, Y. Wu, Y. Cheng, Y. Ou, Y. Xu, Y. Wang, Y. Gong, Y. Wu, Y. Zou, Y. Li, Y. Xiong, Y. Luo, Y. You, Y. Liu, Y. Zhou, Z. F. Wu, Z. Z. Ren, Z. Zhao, Z. Ren, Z. Sha, Z. Fu, Z. Xu, Z. Xie, Z. Zhang, Z. Hao, Z. Gou, Z. Ma, Z. Yan, Z. Shao, Z. Huang, Z. Wu, Z. Li, Z. Zhang, Z. Xu, Z. Wang, Z. Gu, Z. Zhu, Z. Li, Z. Zhang, Z. Xie, Z. Gao, Z. Pan, Z. Yao, B. Feng, H. Li, J. L. Cai, J. Ni, L. Xu, M. Li, N. Tian, R. J. Chen, R. L. Jin, S. S. Li, S. Zhou, T. Sun, X. Q. Li, X. Jin, X. Shen, X. Chen, X. Song, X. Zhou, Y. X. Zhu, Y. Huang, Y. Li, Y. Zheng, Y. Zhu, Y. Ma, Z. Huang, Z. Xu, Z. Zhang, D. Ji, J. Liang, J. Guo, J. Chen, L. Xia, M. Wang, M. Li, P. Zhang, R. Chen, S. Sun, S. Wu, S. Ye, T. Wang, W. L. Xiao, W. An, X. Wang, X. Sun, X. Wang, Y. Tang, Y. Zha, Z. Zhang, Z. Ju, Z. Zhang, and Z. Qu (2025) DeepSeek-v3.2: pushing the frontier of open large language models. External Links: 2512.02556, Link Cited by: §5.1.1, §5.1.2, §5.2.
- [14] M. Dehghani, B. Mustafa, J. Djolonga, J. Heek, M. Minderer, M. Caron, A. Steiner, J. Puigcerver, R. Geirhos, I. Alabdulmohsin, A. Oliver, P. Padlewski, A. Gritsenko, M. Lučić, and N. Houlsby (2023) Patch n’ pack: navit, a vision transformer for any aspect ratio and resolution. External Links: 2307.06304, Link Cited by: §1, §4.2.
- [15] X. Deng, J. Da, E. Pan, Y. Y. He, C. Ide, K. Garg, N. Lauffer, A. Park, N. Pasari, C. Rane, et al. (2025) SWE-bench pro: can ai agents solve long-horizon software engineering tasks?. arXiv preprint arXiv:2509.16941. Cited by: 2nd item.
- [16] C. Fu, Y. Dai, Y. Luo, L. Li, S. Ren, R. Zhang, Z. Wang, C. Zhou, Y. Shen, M. Zhang, P. Chen, Y. Li, S. Lin, S. Zhao, K. Li, T. Xu, X. Zheng, E. Chen, C. Shan, R. He, and X. Sun (2025) Video-mme: the first-ever comprehensive evaluation benchmark of multi-modal llms in video analysis. External Links: 2405.21075, Link Cited by: 5th item.
- [17] X. Fu, Y. Hu, B. Li, Y. Feng, H. Wang, X. Lin, D. Roth, N. A. Smith, W. Ma, and R. Krishna (2024) BLINK: multimodal large language models can see but not perceive. External Links: 2404.12390, Link Cited by: 4th item.
- [18] S. Y. Gadre, G. Ilharco, A. Fang, J. Hayase, G. Smyrnis, T. Nguyen, R. Marten, M. Wortsman, D. Ghosh, J. Zhang, et al. (2024) Datacomp: in search of the next generation of multimodal datasets. Advances in Neural Information Processing Systems 36. Cited by: §B.3.
- [19] Google (2025) Gemini 3 pro. External Links: Link Cited by: §1, §5.1.1.
- [20] D. Guo, F. Wu, F. Zhu, F. Leng, G. Shi, H. Chen, H. Fan, J. Wang, J. Jiang, J. Wang, J. Chen, J. Huang, K. Lei, L. Yuan, L. Luo, P. Liu, Q. Ye, R. Qian, S. Yan, S. Zhao, S. Peng, S. Li, S. Yuan, S. Wu, T. Cheng, W. Liu, W. Wang, X. Zeng, X. Liu, X. Qin, X. Ding, X. Xiao, X. Zhang, X. Zhang, X. Xiong, Y. Peng, Y. Chen, Y. Li, Y. Hu, Y. Lin, Y. Hu, Y. Zhang, Y. Wu, Y. Li, Y. Liu, Y. Ling, Y. Qin, Z. Wang, Z. He, A. Zhang, B. Yi, B. Liao, C. Huang, C. Zhang, C. Deng, C. Deng, C. Lin, C. Yuan, C. Li, C. Gou, C. Lou, C. Wei, C. Liu, C. Li, D. Zhu, D. Zhong, F. Li, F. Zhang, G. Wu, G. Li, G. Xiao, H. Lin, H. Yang, H. Wang, H. Ji, H. Hao, H. Shen, H. Li, J. Li, J. Wu, J. Zhu, J. Jiao, J. Feng, J. Chen, J. Duan, J. Liu, J. Zeng, J. Tang, J. Sun, J. Chen, J. Long, J. Feng, J. Zhan, J. Fang, J. Lu, K. Hua, K. Liu, K. Shen, K. Zhang, K. Shen, K. Wang, K. Pan, K. Zhang, K. Li, L. Li, L. Li, L. Shi, L. Han, L. Xiang, L. Chen, L. Chen, L. Li, L. Yan, L. Chi, L. Liu, M. Du, M. Wang, N. Pan, P. Chen, P. Chen, P. Wu, Q. Yuan, Q. Shuai, Q. Tao, R. Zheng, R. Zhang, R. Zhang, R. Wang, R. Yang, R. Zhao, S. Xu, S. Liang, S. Yan, S. Zhong, S. Cao, S. Wu, S. Liu, S. Chang, S. Cai, T. Ao, T. Yang, T. Zhang, W. Zhong, W. Jia, W. Weng, W. Yu, W. Huang, W. Zhu, W. Yang, W. Wang, X. Long, X. Yin, X. Li, X. Zhu, X. Jia, X. Zhang, X. Liu, X. Zhang, X. Yang, X. Luo, X. Chen, X. Zhong, X. Xiao, X. Li, Y. Wu, Y. Wen, Y. Du, Y. Zhang, Y. Ye, Y. Wu, Y. Liu, Y. Yue, Y. Zhou, Y. Yuan, Y. Xu, Y. Yang, Y. Zhang, Y. Fang, Y. Li, Y. Ren, Y. Xiong, Z. Hong, Z. Wang, Z. Sun, Z. Wang, Z. Cai, Z. Zha, Z. An, Z. Zhao, Z. Xu, Z. Chen, Z. Wu, Z. Zheng, Z. Wang, Z. Huang, Z. Zhu, and Z. Song (2025) Seed1.5-vl technical report. External Links: 2505.07062, Link Cited by: §1, §2.1.
- [21] L. Haas, G. Yona, G. D’Antonio, S. Goldshtein, and D. Das (2025) SimpleQA verified: a reliable factuality benchmark to measure parametric knowledge. External Links: 2509.07968, Link Cited by: 1st item.
- [22] Y. He, W. Li, H. Zhang, S. Li, K. Mandyam, S. Khosla, Y. Xiong, N. Wang, X. Peng, B. Li, S. Bi, S. G. Patil, Q. Qi, S. Feng, J. Katz-Samuels, R. Y. Pang, S. Gonugondla, H. Lang, Y. Yu, Y. Qian, M. Fazel-Zarandi, L. Yu, A. Benhalloum, H. Awadalla, and M. Faruqui (2025) AdvancedIF: rubric-based benchmarking and reinforcement learning for advancing llm instruction following. External Links: 2511.10507, Link Cited by: 1st item.
- [23] W. Hong, Y. Cheng, Z. Yang, W. Wang, L. Wang, X. Gu, S. Huang, Y. Dong, and J. Tang (2025) MotionBench: benchmarking and improving fine-grained video motion understanding for vision language models. External Links: 2501.02955, Link Cited by: 5th item.
- [24] K. Hu, P. Wu, F. Pu, W. Xiao, Y. Zhang, X. Yue, B. Li, and Z. Liu (2025) Video-mmmu: evaluating knowledge acquisition from multi-discipline professional videos. External Links: 2501.13826, Link Cited by: 5th item.
- [25] L. Hu, J. Jiao, J. Liu, Y. Ren, Z. Wen, K. Zhang, X. Zhang, X. Gao, T. He, F. Hu, Y. Liao, Z. Wang, C. Yang, Q. Yang, M. Yin, Z. Zeng, G. Zhang, X. Zhang, X. Zhao, Z. Zhu, H. Namkoong, W. Huang, and Y. Tang (2025) FinSearchComp: towards a realistic, expert-level evaluation of financial search and reasoning. External Links: 2509.13160, Link Cited by: 3rd item.
- [26] Y. Huang, Y. Cheng, A. Bapna, O. Firat, M. X. Chen, D. Chen, H. Lee, J. Ngiam, Q. V. Le, Y. Wu, and Z. Chen (2019) GPipe: efficient training of giant neural networks using pipeline parallelism. External Links: 1811.06965, Link Cited by: Appendix C.
- [27] N. Jain, K. Han, A. Gu, W. Li, F. Yan, T. Zhang, S. Wang, A. Solar-Lezama, K. Sen, and I. Stoica (2024) Livecodebench: holistic and contamination free evaluation of large language models for code. arXiv preprint arXiv:2403.07974. Cited by: 2nd item.
- [28] C. E. Jimenez, J. Yang, A. Wettig, S. Yao, K. Pei, O. Press, and K. Narasimhan (2023) Swe-bench: can language models resolve real-world github issues?. arXiv preprint arXiv:2310.06770. Cited by: 2nd item.
- [29] K. Jordan, Y. Jin, V. Boza, J. You, F. Cesista, L. Newhouse, and J. Bernstein (2024) Muon: an optimizer for hidden layers in neural networks. External Links: Link Cited by: §4.1, §4.4.2.
- [30] Kimi Team (2025) Kimi k1. 5: scaling reinforcement learning with llms. arXiv preprint arXiv:2501.12599. Cited by: Appendix D, §4.4.2, §4.4.2.
- [31] H. Laurençon, L. Saulnier, L. Tronchon, S. Bekman, A. Singh, A. Lozhkov, T. Wang, S. Karamcheti, A. Rush, D. Kiela, et al. (2024) Obelics: an open web-scale filtered dataset of interleaved image-text documents. Advances in Neural Information Processing Systems 36. Cited by: §B.3.
- [32] D. Lepikhin, H. Lee, Y. Xu, D. Chen, O. Firat, Y. Huang, M. Krikun, N. Shazeer, and Z. Chen (2020) Gshard: scaling giant models with conditional computation and automatic sharding. arXiv preprint arXiv:2006.16668. Cited by: Appendix C.
- [33] J. Liu, J. Su, X. Yao, Z. Jiang, G. Lai, Y. Du, Y. Qin, W. Xu, E. Lu, J. Yan, et al. (2025) Muon is scalable for llm training. arXiv preprint arXiv:2502.16982. Cited by: §4.1, §4.3, §4.4.2.
- [34] Y. Liu, Z. Li, M. Huang, B. Yang, W. Yu, C. Li, X. Yin, C. Liu, L. Jin, and X. Bai (2024-12) OCRBench: on the hidden mystery of ocr in large multimodal models. Science China Information Sciences 67 (12). External Links: ISSN 1869-1919, Link, Document Cited by: 4th item.
- [35] P. Lu, H. Bansal, T. Xia, J. Liu, C. Li, H. Hajishirzi, H. Cheng, K. Chang, M. Galley, and J. Gao (2024) MathVista: evaluating mathematical reasoning of foundation models in visual contexts. External Links: 2310.02255, Link Cited by: 4th item.
- [36] T. Luong, D. Hwang, H. H. Nguyen, G. Ghiasi, Y. Chervonyi, I. Seo, J. Kim, G. Bingham, J. Lee, S. Mishra, A. Zhai, H. Hu, H. Michalewski, J. Kim, J. Ahn, J. Bae, X. Song, T. H. Trinh, Q. V. Le, and J. Jung (2025-11) Towards robust mathematical reasoning. In Proceedings of the 2025 Conference on Empirical Methods in Natural Language Processing, C. Christodoulopoulos, T. Chakraborty, C. Rose, and V. Peng (Eds.), Suzhou, China, pp. 35418–35442. External Links: Link, Document, ISBN 979-8-89176-332-6 Cited by: 1st item.
- [37] M. Mathew, V. Bagal, R. P. Tito, D. Karatzas, E. Valveny, and C. V. Jawahar (2021) InfographicVQA. External Links: 2104.12756, Link Cited by: 4th item.
- [38] M. A. Merrill, A. G. Shaw, N. Carlini, B. Li, H. Raj, I. Bercovich, L. Shi, J. Y. Shin, T. Walshe, E. K. Buchanan, et al. (2026) Terminal-bench: benchmarking agents on hard, realistic tasks in command line interfaces. arXiv preprint arXiv:2601.11868. Cited by: 2nd item.
- [39] D. Narayanan, M. Shoeybi, J. Casper, P. LeGresley, M. Patwary, V. A. Korthikanti, D. Vainbrand, P. Kashinkunti, J. Bernauer, B. Catanzaro, A. Phanishayee, and M. Zaharia (2021) Efficient large-scale language model training on gpu clusters using megatron-lm. External Links: 2104.04473, Link Cited by: Appendix C.
- [40] M. A. of America (2025) 2025 american invitational mathematics examination i. Note: Held on February 6, 2025 External Links: Link Cited by: 1st item.
- [41] OpenAI (2025) Introducing gpt 5.2. External Links: Link Cited by: §1, §5.1.1.
- [42] L. Ouyang, Y. Qu, H. Zhou, J. Zhu, R. Zhang, Q. Lin, B. Wang, Z. Zhao, M. Jiang, X. Zhao, J. Shi, F. Wu, P. Chu, M. Liu, Z. Li, C. Xu, B. Zhang, B. Shi, Z. Tu, and C. He (2025) OmniDocBench: benchmarking diverse pdf document parsing with comprehensive annotations. External Links: 2412.07626, Link Cited by: 4th item.
- [43] T. Patwardhan, R. Dias, E. Proehl, G. Kim, M. Wang, O. Watkins, S. P. Fishman, M. Aljubeh, P. Thacker, L. Fauconnet, N. S. Kim, P. Chao, S. Miserendino, G. Chabot, D. Li, M. Sharman, A. Barr, A. Glaese, and J. Tworek (2025) GDPval: evaluating AI model performance on real-world economically valuable tasks. External Links: 2510.04374, Link Cited by: 3rd item.
- [44] B. Peng, J. Quesnelle, H. Fan, and E. Shippole (2023) Yarn: efficient context window extension of large language models. arXiv preprint arXiv:2309.00071. Cited by: §4.3.
- [45] T. Pham, N. Nguyen, P. Zunjare, W. Chen, Y. Tseng, and T. Vu (2025) SealQA: raising the bar for reasoning in search-augmented language models. Note: Seal-0 is the main subset of this benchmark External Links: 2506.01062, Link Cited by: 3rd item.
- [46] L. Phan, A. Gatti, Z. Han, N. Li, J. Hu, H. Zhang, C. B. C. Zhang, M. Shaaban, J. Ling, S. Shi, M. Choi, A. Agrawal, A. Chopra, A. Khoja, R. Kim, R. Ren, J. Hausenloy, O. Zhang, M. Mazeika, D. Dodonov, T. Nguyen, J. Lee, D. Anderson, M. Doroshenko, A. C. Stokes, M. Mahmood, O. Pokutnyi, O. Iskra, J. P. Wang, J. Levin, M. Kazakov, F. Feng, S. Y. Feng, H. Zhao, M. Yu, V. Gangal, C. Zou, Z. Wang, S. Popov, R. Gerbicz, G. Galgon, J. Schmitt, W. Yeadon, Y. Lee, S. Sauers, A. Sanchez, F. Giska, M. Roth, S. Riis, S. Utpala, N. Burns, G. M. Goshu, M. M. Naiya, C. Agu, Z. Giboney, A. Cheatom, F. Fournier-Facio, S. Crowson, L. Finke, Z. Cheng, J. Zampese, R. G. Hoerr, M. Nandor, H. Park, T. Gehrunger, J. Cai, B. McCarty, A. C. Garretson, E. Taylor, D. Sileo, Q. Ren, U. Qazi, L. Li, J. Nam, J. B. Wydallis, P. Arkhipov, J. W. L. Shi, A. Bacho, C. G. Willcocks, H. Cao, S. Motwani, E. de Oliveira Santos, J. Veith, E. Vendrow, D. Cojoc, K. Zenitani, J. Robinson, L. Tang, Y. Li, J. Vendrow, N. W. Fraga, V. Kuchkin, A. P. Maksimov, P. Marion, D. Efremov, J. Lynch, K. Liang, A. Mikov, A. Gritsevskiy, J. Guillod, G. Demir, D. Martinez, B. Pageler, K. Zhou, S. Soori, O. Press, H. Tang, P. Rissone, S. R. Green, L. Brüssel, M. Twayana, A. Dieuleveut, J. M. Imperial, A. Prabhu, J. Yang, N. Crispino, A. Rao, D. Zvonkine, G. Loiseau, M. Kalinin, M. Lukas, C. Manolescu, N. Stambaugh, S. Mishra, T. Hogg, C. Bosio, B. P. Coppola, J. Salazar, J. Jin, R. Sayous, S. Ivanov, P. Schwaller, S. Senthilkuma, A. M. Bran, A. Algaba, K. V. den Houte, L. V. D. Sypt, B. Verbeken, D. Noever, A. Kopylov, B. Myklebust, B. Li, L. Schut, E. Zheltonozhskii, Q. Yuan, D. Lim, R. Stanley, T. Yang, J. Maar, J. Wykowski, M. Oller, A. Sahu, C. G. Ardito, Y. Hu, A. G. K. Kamdoum, A. Jin, T. G. Vilchis, Y. Zu, M. Lackner, J. Koppel, G. Sun, D. S. Antonenko, S. Chern, B. Zhao, P. Arsene, J. M. Cavanagh, D. Li, J. Shen, D. Crisostomi, W. Zhang, A. Dehghan, S. Ivanov, D. Perrella, N. Kaparov, A. Zang, I. Sucholutsky, A. Kharlamova, D. Orel, V. Poritski, S. Ben-David, Z. Berger, P. Whitfill, M. Foster, D. Munro, L. Ho, S. Sivarajan, D. B. Hava, A. Kuchkin, D. Holmes, A. Rodriguez-Romero, F. Sommerhage, A. Zhang, R. Moat, K. Schneider, Z. Kazibwe, D. Clarke, D. H. Kim, F. M. Dias, S. Fish, V. Elser, T. Kreiman, V. E. G. Vilchis, I. Klose, U. Anantheswaran, A. Zweiger, K. Rawal, J. Li, J. Nguyen, N. Daans, H. Heidinger, M. Radionov, V. Rozhoň, V. Ginis, C. Stump, N. Cohen, R. Poświata, J. Tkadlec, A. Goldfarb, C. Wang, P. Padlewski, S. Barzowski, K. Montgomery, R. Stendall, J. Tucker-Foltz, J. Stade, T. R. Rogers, T. Goertzen, D. Grabb, A. Shukla, A. Givré, J. A. Ambay, A. Sen, M. F. Aziz, M. H. Inlow, H. He, L. Zhang, Y. Kaddar, I. Ängquist, Y. Chen, H. K. Wang, K. Ramakrishnan, E. Thornley, A. Terpin, H. Schoelkopf, E. Zheng, A. Carmi, E. D. L. Brown, K. Zhu, M. Bartolo, R. Wheeler, M. Stehberger, P. Bradshaw, J. Heimonen, K. Sridhar, I. Akov, J. Sandlin, Y. Makarychev, J. Tam, H. Hoang, D. M. Cunningham, V. Goryachev, D. Patramanis, M. Krause, A. Redenti, D. Aldous, J. Lai, S. Coleman, J. Xu, S. Lee, I. Magoulas, S. Zhao, N. Tang, M. K. Cohen, O. Paradise, J. H. Kirchner, M. Ovchynnikov, J. O. Matos, A. Shenoy, M. Wang, Y. Nie, A. Sztyber-Betley, P. Faraboschi, R. Riblet, J. Crozier, S. Halasyamani, S. Verma, P. Joshi, E. Meril, Z. Ma, J. Andréoletti, R. Singhal, J. Platnick, V. Nevirkovets, L. Basler, A. Ivanov, S. Khoury, N. Gustafsson, M. Piccardo, H. Mostaghimi, Q. Chen, V. Singh, T. Q. Khánh, P. Rosu, H. Szlyk, Z. Brown, H. Narayan, A. Menezes, J. Roberts, W. Alley, K. Sun, A. Patel, M. Lamparth, A. Reuel, L. Xin, H. Xu, J. Loader, F. Martin, Z. Wang, A. Achilleos, T. Preu, T. Korbak, I. Bosio, F. Kazemi, Z. Chen, B. Bálint, E. J. Y. Lo, J. Wang, M. I. S. Nunes, J. Milbauer, M. S. Bari, Z. Wang, B. Ansarinejad, Y. Sun, S. Durand, H. Elgnainy, G. Douville, D. Tordera, G. Balabanian, H. Wolff, L. Kvistad, H. Milliron, A. Sakor, M. Eron, A. F. D. O., S. Shah, X. Zhou, F. Kamalov, S. Abdoli, T. Santens, S. Barkan, A. Tee, R. Zhang, A. Tomasiello, G. B. D. Luca, S. Looi, V. Le, N. Kolt, J. Pan, E. Rodman, J. Drori, C. J. Fossum, N. Muennighoff, M. Jagota, R. Pradeep, H. Fan, J. Eicher, M. Chen, K. Thaman, W. Merrill, M. Firsching, C. Harris, S. Ciobâcă, J. Gross, R. Pandey, I. Gusev, A. Jones, S. Agnihotri, P. Zhelnov, M. Mofayezi, A. Piperski, D. K. Zhang, K. Dobarskyi, R. Leventov, I. Soroko, J. Duersch, V. Taamazyan, A. Ho, W. Ma, W. Held, R. Xian, A. R. Zebaze, M. Mohamed, J. N. Leser, M. X. Yuan, L. Yacar, J. Lengler, K. Olszewska, C. D. Fratta, E. Oliveira, J. W. Jackson, A. Zou, M. Chidambaram, T. Manik, H. Haffenden, D. Stander, A. Dasouqi, A. Shen, B. Golshani, D. Stap, E. Kretov, M. Uzhou, A. B. Zhidkovskaya, N. Winter, M. O. Rodriguez, R. Lauff, D. Wehr, C. Tang, Z. Hossain, S. Phillips, F. Samuele, F. Ekström, A. Hammon, O. Patel, F. Farhidi, G. Medley, F. Mohammadzadeh, M. Peñaflor, H. Kassahun, A. Friedrich, R. H. Perez, D. Pyda, T. Sakal, O. Dhamane, A. K. Mirabadi, E. Hallman, K. Okutsu, M. Battaglia, M. Maghsoudimehrabani, A. Amit, D. Hulbert, R. Pereira, S. Weber, Handoko, A. Peristyy, S. Malina, M. Mehkary, R. Aly, F. Reidegeld, A. Dick, C. Friday, M. Singh, H. Shapourian, W. Kim, M. Costa, H. Gurdogan, H. Kumar, C. Ceconello, C. Zhuang, H. Park, M. Carroll, A. R. Tawfeek, S. Steinerberger, D. Aggarwal, M. Kirchhof, L. Dai, E. Kim, J. Ferret, J. Shah, Y. Wang, M. Yan, K. Burdzy, L. Zhang, A. Franca, D. T. Pham, K. Y. Loh, J. Robinson, A. Jackson, P. Giordano, P. Petersen, A. Cosma, J. Colino, C. White, J. Votava, V. Vinnikov, E. Delaney, P. Spelda, V. Stritecky, S. M. Shahid, J. Mourrat, L. Vetoshkin, K. Sponselee, R. Bacho, Z. Yong, F. de la Rosa, N. Cho, X. Li, G. Malod, O. Weller, G. Albani, L. Lang, J. Laurendeau, D. Kazakov, F. Adesanya, J. Portier, L. Hollom, V. Souza, Y. A. Zhou, J. Degorre, Y. Yalın, G. D. Obikoya, Rai, F. Bigi, M. C. Boscá, O. Shumar, K. Bacho, G. Recchia, M. Popescu, N. Shulga, N. M. Tanwie, T. C. H. Lux, B. Rank, C. Ni, M. Brooks, A. Yakimchyk, Huanxu, Liu, S. Cavalleri, O. Häggström, E. Verkama, J. Newbould, H. Gundlach, L. Brito-Santana, B. Amaro, V. Vajipey, R. Grover, T. Wang, Y. Kratish, W. Li, S. Gopi, A. Caciolai, C. S. de Witt, P. Hernández-Cámara, E. Rodolà, J. Robins, D. Williamson, V. Cheng, B. Raynor, H. Qi, B. Segev, J. Fan, S. Martinson, E. Y. Wang, K. Hausknecht, M. P. Brenner, M. Mao, C. Demian, P. Kassani, X. Zhang, D. Avagian, E. J. Scipio, A. Ragoler, J. Tan, B. Sims, R. Plecnik, A. Kirtland, O. F. Bodur, D. P. Shinde, Y. C. L. Labrador, Z. Adoul, M. Zekry, A. Karakoc, T. C. B. Santos, S. Shamseldeen, L. Karim, A. Liakhovitskaia, N. Resman, N. Farina, J. C. Gonzalez, G. Maayan, E. Anderson, R. D. O. Pena, E. Kelley, H. Mariji, R. Pouriamanesh, W. Wu, R. Finocchio, I. Alarab, J. Cole, D. Ferreira, B. Johnson, M. Safdari, L. Dai, S. Arthornthurasuk, I. C. McAlister, A. J. Moyano, A. Pronin, J. Fan, A. Ramirez-Trinidad, Y. Malysheva, D. Pottmaier, O. Taheri, S. Stepanic, S. Perry, L. Askew, R. A. H. Rodríguez, A. M. R. Minissi, R. Lorena, K. Iyer, A. A. Fasiludeen, R. Clark, J. Ducey, M. Piza, M. Somrak, E. Vergo, J. Qin, B. Borbás, E. Chu, J. Lindsey, A. Jallon, I. M. J. McInnis, E. Chen, A. Semler, L. Gloor, T. Shah, M. Carauleanu, P. Lauer, T. Đ. Huy, H. Shahrtash, E. Duc, L. Lewark, A. Brown, S. Albanie, B. Weber, W. S. Vaz, P. Clavier, Y. Fan, G. P. R. e Silva, Long, Lian, M. Abramovitch, X. Jiang, S. Mendoza, M. Islam, J. Gonzalez, V. Mavroudis, J. Xu, P. Kumar, L. P. Goswami, D. Bugas, N. Heydari, F. Jeanplong, T. Jansen, A. Pinto, A. Apronti, A. Galal, N. Ze-An, A. Singh, T. Jiang, J. of Arc Xavier, K. P. Agarwal, M. Berkani, G. Zhang, Z. Du, B. A. de Oliveira Junior, D. Malishev, N. Remy, T. D. Hartman, T. Tarver, S. Mensah, G. A. Loume, W. Morak, F. Habibi, S. Hoback, W. Cai, J. Gimenez, R. G. Montecillo, J. Łucki, R. Campbell, A. Sharma, K. Meer, S. Gul, D. E. Gonzalez, X. Alapont, A. Hoover, G. Chhablani, F. Vargus, A. Agarwal, Y. Jiang, D. Patil, D. Outevsky, K. J. Scaria, R. Maheshwari, A. Dendane, P. Shukla, A. Cartwright, S. Bogdanov, N. Mündler, S. Möller, L. Arnaboldi, K. Thaman, M. R. Siddiqi, P. Saxena, H. Gupta, T. Fruhauff, G. Sherman, M. Vincze, S. Usawasutsakorn, D. Ler, A. Radhakrishnan, I. Enyekwe, S. M. Salauddin, J. Muzhen, A. Maksapetyan, V. Rossbach, C. Harjadi, M. Bahaloohoreh, C. Sparrow, J. Sidhu, S. Ali, S. Bian, J. Lai, E. Singer, J. L. Uro, G. Bateman, M. Sayed, A. Menshawy, D. Duclosel, D. Bezzi, Y. Jain, A. Aaron, M. Tiryakioglu, S. Siddh, K. Krenek, I. A. Shah, J. Jin, S. Creighton, D. Peskoff, Z. EL-Wasif, R. P. V, M. Richmond, J. McGowan, T. Patwardhan, H. Sun, T. Sun, N. Zubić, S. Sala, S. Ebert, J. Kaddour, M. Schottdorf, D. Wang, G. Petruzella, A. Meiburg, T. Medved, A. ElSheikh, S. A. Hebbar, L. Vaquero, X. Yang, J. Poulos, V. Zouhar, S. Bogdanik, M. Zhang, J. Sanz-Ros, D. Anugraha, Y. Dai, A. N. Nhu, X. Wang, A. A. Demircali, Z. Jia, Y. Zhou, J. Wu, M. He, N. Chandok, A. Sinha, G. Luo, L. Le, M. Noyé, M. Perełkiewicz, I. Pantidis, T. Qi, S. S. Purohit, L. Parcalabescu, T. Nguyen, G. I. Winata, E. M. Ponti, H. Li, K. Dhole, J. Park, D. Abbondanza, Y. Wang, A. Nayak, D. M. Caetano, A. A. W. L. Wong, M. del Rio-Chanona, D. Kondor, P. Francois, E. Chalstrey, J. Zsambok, D. Hoyer, J. Reddish, J. Hauser, F. Rodrigo-Ginés, S. Datta, M. Shepherd, T. Kamphuis, Q. Zhang, H. Kim, R. Sun, J. Yao, F. Dernoncourt, S. Krishna, S. Rismanchian, B. Pu, F. Pinto, Y. Wang, K. Shridhar, K. J. Overholt, G. Briia, H. Nguyen, David, S. Bartomeu, T. C. Pang, A. Wecker, Y. Xiong, F. Li, L. S. Huber, J. Jaeger, R. D. Maddalena, X. H. Lù, Y. Zhang, C. Beger, P. T. J. Kon, S. Li, V. Sanker, M. Yin, Y. Liang, X. Zhang, A. Agrawal, L. S. Yifei, Z. Zhang, M. Cai, Y. Sonmez, C. Cozianu, C. Li, A. Slen, S. Yu, H. K. Park, G. Sarti, M. Briański, A. Stolfo, T. A. Nguyen, M. Zhang, Y. Perlitz, J. Hernandez-Orallo, R. Li, A. Shabani, F. Juefei-Xu, S. Dhingra, O. Zohar, M. C. Nguyen, A. Pondaven, A. Yilmaz, X. Zhao, C. Jin, M. Jiang, S. Todoran, X. Han, J. Kreuer, B. Rabern, A. Plassart, M. Maggetti, L. Yap, R. Geirhos, J. Kean, D. Wang, S. Mollaei, C. Sun, Y. Yin, S. Wang, R. Li, Y. Chang, A. Wei, A. Bizeul, X. Wang, A. O. Arrais, K. Mukherjee, J. Chamorro-Padial, J. Liu, X. Qu, J. Guan, A. Bouyamourn, S. Wu, M. Plomecka, J. Chen, M. Tang, J. Deng, S. Subramanian, H. Xi, H. Chen, W. Zhang, Y. Ren, H. Tu, S. Kim, Y. Chen, S. V. Marjanović, J. Ha, G. Luczyna, J. J. Ma, Z. Shen, D. Song, C. E. Zhang, Z. Wang, G. Gendron, Y. Xiao, L. Smucker, E. Weng, K. H. Lee, Z. Ye, S. Ermon, I. D. Lopez-Miguel, T. Knights, A. Gitter, N. Park, B. Wei, H. Chen, K. Pai, A. Elkhanany, H. Lin, P. D. Siedler, J. Fang, R. Mishra, K. Zsolnai-Fehér, X. Jiang, S. Khan, J. Yuan, R. K. Jain, X. Lin, M. Peterson, Z. Wang, A. Malusare, M. Tang, I. Gupta, I. Fosin, T. Kang, B. Dworakowska, K. Matsumoto, G. Zheng, G. Sewuster, J. P. Villanueva, I. Rannev, I. Chernyavsky, J. Chen, D. Banik, B. Racz, W. Dong, J. Wang, L. Bashmal, D. V. Gonçalves, W. Hu, K. Bar, O. Bohdal, A. S. Patlan, S. Dhuliawala, C. Geirhos, J. Wist, Y. Kansal, B. Chen, K. Tire, A. T. Yücel, B. Christof, V. Singla, Z. Song, S. Chen, J. Ge, K. Ponkshe, I. Park, T. Shi, M. Q. Ma, J. Mak, S. Lai, A. Moulin, Z. Cheng, Z. Zhu, Z. Zhang, V. Patil, K. Jha, Q. Men, J. Wu, T. Zhang, B. H. Vieira, A. F. Aji, J. Chung, M. Mahfoud, H. T. Hoang, M. Sperzel, W. Hao, K. Meding, S. Xu, V. Kostakos, D. Manini, Y. Liu, C. Toukmaji, J. Paek, E. Yu, A. E. Demircali, Z. Sun, I. Dewerpe, H. Qin, R. Pflugfelder, J. Bailey, J. Morris, V. Heilala, S. Rosset, Z. Yu, P. E. Chen, W. Yeo, E. Jain, R. Yang, S. Chigurupati, J. Chernyavsky, S. P. Reddy, S. Venugopalan, H. Batra, C. F. Park, H. Tran, G. Maximiano, G. Zhang, Y. Liang, H. Shiyu, R. Xu, R. Pan, S. Suresh, Z. Liu, S. Gulati, S. Zhang, P. Turchin, C. W. Bartlett, C. R. Scotese, P. M. Cao, A. Nattanmai, G. McKellips, A. Cheraku, A. Suhail, E. Luo, M. Deng, J. Luo, A. Zhang, K. Jindel, J. Paek, K. Halevy, A. Baranov, M. Liu, A. Avadhanam, D. Zhang, V. Cheng, B. Ma, E. Fu, L. Do, J. Lass, H. Yang, S. Sunkari, V. Bharath, V. Ai, J. Leung, R. Agrawal, A. Zhou, K. Chen, T. Kalpathi, Z. Xu, G. Wang, T. Xiao, E. Maung, S. Lee, R. Yang, R. Yue, B. Zhao, J. Yoon, S. Sun, A. Singh, E. Luo, C. Peng, T. Osbey, T. Wang, D. Echeazu, H. Yang, T. Wu, S. Patel, V. Kulkarni, V. Sundarapandiyan, A. Zhang, A. Le, Z. Nasim, S. Yalam, R. Kasamsetty, S. Samal, H. Yang, D. Sun, N. Shah, A. Saha, A. Zhang, L. Nguyen, L. Nagumalli, K. Wang, A. Zhou, A. Wu, J. Luo, A. Telluri, S. Yue, A. Wang, and D. Hendrycks (2025) Humanity’s last exam. External Links: 2501.14249, Link Cited by: 1st item.
- [47] D. Rein, B. L. Hou, A. C. Stickland, J. Petty, R. Y. Pang, J. Dirani, J. Michael, and S. R. Bowman (2024) Gpqa: a graduate-level google-proof q&a benchmark. In First Conference on Language Modeling, Cited by: 1st item.
- [48] J. Roberts, M. R. Taesiri, A. Sharma, A. Gupta, S. Roberts, I. Croitoru, S. Bogolin, J. Tang, F. Langer, V. Raina, V. Raina, H. Xiong, V. Udandarao, J. Lu, S. Chen, S. Purkis, T. Yan, W. Lin, G. Shin, Q. Yang, A. T. Nguyen, D. I. Atkinson, A. Baranwal, A. Coca, M. Dang, S. Dziadzio, J. D. Kunz, K. Liang, A. Lo, B. Pulfer, S. Walton, C. Yang, K. Han, and S. Albanie (2025) ZeroBench: an impossible visual benchmark for contemporary large multimodal models. External Links: 2502.09696, Link Cited by: 4th item.
- [49] C. Schuhmann, R. Beaumont, R. Vencu, C. Gordon, R. Wightman, M. Cherti, T. Coombes, A. Katta, C. Mullis, M. Wortsman, et al. (2022) Laion-5b: an open large-scale dataset for training next generation image-text models. Advances in Neural Information Processing Systems 35, pp. 25278–25294. Cited by: §B.3.
- [50] J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov (2017) Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347. External Links: Link Cited by: §4.4.2.
- [51] T. Song, H. Lu, H. Yang, L. Sui, H. Wu, Z. Zhou, Z. Huang, Y. Bao, Y. Charles, X. Zhou, and L. Wang (2026) Towards pixel-level vlm perception via simple points prediction. External Links: 2601.19228, Link Cited by: §B.3.
- [52] G. Starace, O. Jaffe, D. Sherburn, J. Aung, J. S. Chan, L. Maksin, R. Dias, E. Mays, B. Kinsella, W. Thompson, et al. (2025) PaperBench: evaluating ai’s ability to replicate ai research. arXiv preprint arXiv:2504.01848. Cited by: 2nd item.
- [53] K. Team, Y. Bai, Y. Bao, G. Chen, J. Chen, N. Chen, R. Chen, Y. Chen, Y. Chen, Y. Chen, et al. (2025) Kimi k2: open agentic intelligence. arXiv preprint arXiv:2507.20534. Cited by: §B.2, §4.1, §4.4.1, §4.4.2, §4.4.2, §4.5.
- [54] K. Team, A. Du, B. Yin, B. Xing, B. Qu, B. Wang, C. Chen, C. Zhang, C. Du, C. Wei, et al. (2025) Kimi-vl technical report. arXiv preprint arXiv:2504.07491. Cited by: §4.2, §4.3, §4.5.1.
- [55] M. L. Team, B. Wang, B. Xiao, B. Zhang, B. Rong, B. Chen, C. Wan, C. Zhang, C. Huang, C. Chen, et al. (2025) Longcat-flash-omni technical report. arXiv preprint arXiv:2511.00279. Cited by: §4.5.1.
- [56] M. Tian, L. Gao, S. Zhang, X. Chen, C. Fan, X. Guo, R. Haas, P. Ji, K. Krongchon, Y. Li, et al. (2024) Scicode: a research coding benchmark curated by scientists. Advances in Neural Information Processing Systems 37, pp. 30624–30650. Cited by: 2nd item.
- [57] S. Tong, Z. Liu, Y. Zhai, Y. Ma, Y. LeCun, and S. Xie (2024) Eyes wide shut? exploring the visual shortcomings of multimodal llms. External Links: 2401.06209, Link Cited by: 4th item.
- [58] H. M. Tournament (2025) Harvard-mit mathematics tournament, february 2025. Note: Held on February 15, 2025 External Links: Link Cited by: 1st item.
- [59] A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin (2017) Attention is all you need. In Advances in Neural Information Processing Systems, I. Guyon, U. V. Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett (Eds.), Vol. 30, pp. . External Links: Link Cited by: §4.1.
- [60] N. Vedula, M. Collins, E. Agichtein, and O. Rokhlenko (2025) DeepSearchQA: bridging the comprehensiveness gap for deep research agents. Google DeepMind, Google Search, Kaggle, and Google Research. External Links: Link Cited by: 3rd item.
- [61] K. Wang, J. Pan, W. Shi, Z. Lu, M. Zhan, and H. Li (2024) Measuring multimodal mathematical reasoning with math-vision dataset. External Links: 2402.14804, Link Cited by: 4th item.
- [62] W. Wang, Z. He, W. Hong, Y. Cheng, X. Zhang, J. Qi, X. Gu, S. Huang, B. Xu, Y. Dong, M. Ding, and J. Tang (2025) LVBench: an extreme long video understanding benchmark. External Links: 2406.08035, Link Cited by: 5th item.
- [63] X. Wang, B. Wang, D. Lu, J. Yang, T. Xie, J. Wang, J. Deng, X. Guo, Y. Xu, C. H. Wu, Z. Shen, Z. Li, R. Li, X. Li, J. Chen, B. Zheng, P. Li, F. Lei, R. Cao, Y. Fu, D. Shin, M. Shin, J. Hu, Y. Wang, J. Chen, Y. Ye, D. Zhang, D. Du, H. Hu, H. Chen, Z. Zhou, H. Yao, Z. Chen, Q. Gu, Y. Wang, H. Wang, D. Yang, V. Zhong, F. Sung, Y. Charles, Z. Yang, and T. Yu (2025) OpenCUA: open foundations for computer-use agents. External Links: 2508.09123, Link Cited by: §E.7.
- [64] Y. Wang, X. Ma, G. Zhang, Y. Ni, A. Chandra, S. Guo, W. Ren, A. Arulraj, X. He, Z. Jiang, T. Li, M. Ku, K. Wang, A. Zhuang, R. Fan, X. Yue, and W. Chen (2024) MMLU-pro: a more robust and challenging multi-task language understanding benchmark. External Links: 2406.01574, Link Cited by: 1st item.
- [65] Z. Wang, Y. Liu, Y. Wang, W. He, B. Gao, M. Diao, Y. Chen, K. Fu, F. Sung, Z. Yang, et al. (2025) OJBench: a competition level code benchmark for large language models. arXiv preprint arXiv:2506.16395. Cited by: 2nd item.
- [66] Z. Wang, T. Shi, J. He, M. Cai, J. Zhang, and D. Song (2025) CyberGym: evaluating ai agents’ cybersecurity capabilities with real-world vulnerabilities at scale. arXiv preprint arXiv:2506.02548. Cited by: 2nd item.
- [67] Z. Wang, M. Xia, L. He, H. Chen, Y. Liu, R. Zhu, K. Liang, X. Wu, H. Liu, S. Malladi, A. Chevalier, S. Arora, and D. Chen (2024) CharXiv: charting gaps in realistic chart understanding in multimodal llms. External Links: 2406.18521, Link Cited by: 4th item.
- [68] J. Wei, Z. Sun, S. Papay, S. McKinney, J. Han, I. Fulford, H. W. Chung, A. T. Passos, W. Fedus, and A. Glaese (2025) BrowseComp: a simple yet challenging benchmark for browsing agents. External Links: 2504.12516, Link Cited by: 3rd item.
- [69] R. Wong, J. Wang, J. Zhao, L. Chen, Y. Gao, L. Zhang, X. Zhou, Z. Wang, K. Xiang, G. Zhang, W. Huang, Y. Wang, and K. Wang (2025) WideSearch: benchmarking agentic broad info-seeking. External Links: 2508.07999, Link Cited by: 3rd item.
- [70] H. Wu, D. Li, B. Chen, and J. Li (2024) LongVideoBench: a benchmark for long-context interleaved video-language understanding. External Links: 2407.15754, Link Cited by: 5th item.
- [71] X. Wu, K. Li, Y. Zhao, L. Zhang, L. Ou, H. Yin, Z. Zhang, X. Yu, D. Zhang, Y. Jiang, P. Xie, F. Huang, M. Cheng, S. Wang, H. Cheng, and J. Zhou (2025) ReSum: unlocking long-horizon search intelligence via context summarization. External Links: 2509.13313, Link Cited by: §5.2.
- [72] T. Xie, M. Yuan, D. Zhang, X. Xiong, Z. Shen, Z. Zhou, X. Wang, Y. Chen, J. Deng, J. Chen, B. Wang, H. Wu, J. Chen, J. Wang, D. Lu, H. Hu, and T. Yu (2025-07) Introducing osworld-verified. xlang.ai. External Links: Link Cited by: 6th item, §5.1.2.
- [73] T. Xie, D. Zhang, J. Chen, X. Li, S. Zhao, R. Cao, T. J. Hua, Z. Cheng, D. Shin, F. Lei, Y. Liu, Y. Xu, S. Zhou, S. Savarese, C. Xiong, V. Zhong, and T. Yu (2024) OSWorld: benchmarking multimodal agents for open-ended tasks in real computer environments. External Links: 2404.07972 Cited by: 6th item, §5.1.2.
- [74] F. Yao, L. Liu, D. Zhang, C. Dong, J. Shang, and J. Gao (2025-08) Your efficient rl framework secretly brings you off-policy rl training. External Links: Link Cited by: §4.4.2.
- [75] X. Yue, Y. Ni, K. Zhang, T. Zheng, R. Liu, G. Zhang, S. Stevens, D. Jiang, W. Ren, Y. Sun, C. Wei, B. Yu, R. Yuan, R. Sun, M. Yin, B. Zheng, Z. Yang, Y. Liu, W. Huang, H. Sun, Y. Su, and W. Chen (2024) MMMU: a massive multi-discipline multimodal understanding and reasoning benchmark for expert agi. In Proceedings of CVPR, Cited by: 4th item.
- [76] X. Yue, T. Zheng, Y. Ni, Y. Wang, K. Zhang, S. Tong, Y. Sun, B. Yu, G. Zhang, H. Sun, Y. Su, W. Chen, and G. Neubig (2025) MMMU-pro: a more robust multi-discipline multimodal understanding benchmark. External Links: 2409.02813, Link Cited by: 4th item.
- [77] X. Zhai, B. Mustafa, A. Kolesnikov, and L. Beyer (2023) Sigmoid loss for language image pre-training. External Links: 2303.15343, Link Cited by: §4.2, §4.3.
- [78] X. Zhao, Y. Liu, K. Xu, J. Guo, Z. Wang, Y. Sun, X. Kong, Q. Cao, L. Jiang, Z. Wen, Z. Zhang, and J. Zhou (2025-09) Small leak can sink a great ship–boost rl training on moe with icepop!. External Links: Link Cited by: §4.4.2.
- [79] Y. Zhao, L. Xie, H. Zhang, G. Gan, Y. Long, Z. Hu, T. Hu, W. Chen, C. Li, J. Song, Z. Xu, C. Wang, W. Pan, Z. Shangguan, X. Tang, Z. Liang, Y. Liu, C. Zhao, and A. Cohan (2025) MMVU: measuring expert-level multi-discipline video understanding. External Links: 2501.12380, Link Cited by: 5th item.
- [80] S. Zhou, F. F. Xu, H. Zhu, X. Zhou, R. Lo, A. Sridhar, X. Cheng, T. Ou, Y. Bisk, D. Fried, U. Alon, and G. Neubig (2023) WebArena: a realistic web environment for building autonomous agents. arXiv preprint arXiv:2307.13854. External Links: Link Cited by: 6th item, §5.1.2.
- [81] W. Zhu, J. Hessel, A. Awadalla, S. Y. Gadre, J. Dodge, A. Fang, Y. Yu, L. Schmidt, W. Y. Wang, and Y. Choi (2024) Multimodal c4: an open, billion-scale corpus of images interleaved with text. Advances in Neural Information Processing Systems 36. Cited by: §B.3.
Appendix A Contributors
Tongtong Bai Yifan Bai Yiping Bao S.H. Cai Yuan Cao Y. Charles H.S. Che Cheng Chen Guanduo Chen Huarong Chen Jia Chen Jiahao Chen Jianlong Chen Jun Chen Kefan Chen Liang Chen Ruijue Chen Xinhao Chen Yanru Chen Yanxu Chen Yicun Chen Yimin Chen Yingjiang Chen Yuankun Chen Yujie Chen Yutian Chen Zhirong Chen Ziwei Chen Dazhi Cheng Minghan Chu Jialei Cui Jiaqi Deng Muxi Diao Hao Ding Mengfan Dong Mengnan Dong Yuxin Dong Yuhao Dong Ang’ang Du Chenzhuang Du Dikang Du Lingxiao Du Yulun Du Yu Fan Shengjun Fang Qiulin Feng Yichen Feng Garimugai Fu Kelin Fu Hongcheng Gao Tong Gao Yuyao Ge Shangyi Geng Chengyang Gong Xiaochen Gong Zhuoma Gongque Qizheng Gu Xinran Gu Yicheng Gu Longyu Guan Yuanying Guo Xiaoru Hao Weiran He Wenyang He Yunjia He Chao Hong Hao Hu Jiaxi Hu Yangyang Hu Zhenxing Hu Ke Huang Ruiyuan Huang Weixiao Huang Zhiqi Huang Tao Jiang Zhejun Jiang Xinyi Jin Yu Jing Guokun Lai Aidi Li C. Li Cheng Li Fang Li Guanghe Li Guanyu Li Haitao Li Haoyang Li Jia Li Jingwei Li Junxiong Li Lincan Li Mo Li Weihong Li Wentao Li Xinhang Li Xinhao Li Yang Li Yanhao Li Yiwei Li Yuxiao Li Zhaowei Li Zheming Li Weilong Liao Jiawei Lin Xiaohan Lin Zhishan Lin Zichao Lin Cheng Liu Chenyu Liu Hongzhang Liu Liang Liu Shaowei Liu Shudong Liu Shuran Liu Tianwei Liu Tianyu Liu Weizhou Liu Xiangyan Liu Yangyang Liu Yanming Liu Yibo Liu Yuanxin Liu Yue Liu Zhengying Liu Zhongnuo Liu Enzhe Lu Haoyu Lu Zhiyuan Lu Junyu Luo Tongxu Luo Yashuo Luo Long Ma Yingwei Ma Shaoguang Mao Yuan Mei Xin Men Fanqing Meng Zhiyong Meng Yibo Miao Minqing Ni Kun Ouyang Siyuan Pan Bo Pang Yuchao Qian Ruoyu Qin Zeyu Qin Jiezhong Qiu Bowen Qu Zeyu Shang Youbo Shao Tianxiao Shen Zhennan Shen Juanfeng Shi Lidong Shi Shengyuan Shi Feifan Song Pengwei Song Tianhui Song Xiaoxi Song Hongjin Su Jianlin Su Zhaochen Su Lin Sui Jinsong Sun Junyao Sun Tongyu Sun Flood Sung Yunpeng Tai Chuning Tang Heyi Tang Xiaojuan Tang Zhengyang Tang Jiawen Tao Shiyuan Teng Chaoran Tian Pengfei Tian Ao Wang Bowen Wang Chensi Wang Chuang Wang Congcong Wang Dingkun Wang Dinglu Wang Dongliang Wang Feng Wang Hailong Wang Haiming Wang Hengzhi Wang Huaqing Wang Hui Wang Jiahao Wang Jinhong Wang Jiuzheng Wang Kaixin Wang Linian Wang Qibin Wang Shengjie Wang Shuyi Wang Si Wang Wei Wang Xiaochen Wang Xinyuan Wang Yao Wang Yejie Wang Yipu Wang Yiqin Wang Yucheng Wang Yuzhi Wang Zhaoji Wang Zhaowei Wang Zhengtao Wang Zhexu Wang Zihan Wang Zizhe Wang Chu Wei Ming Wei Chuan Wen Zichen Wen Chengjie Wu Haoning Wu Junyan Wu Rucong Wu Wenhao Wu Yuefeng Wu Yuhao Wu Yuxin Wu Zijian Wu Chenjun Xiao Jin Xie Xiaotong Xie Yuchong Xie Yifei Xin Bowei Xing Boyu Xu Jianfan Xu Jing Xu Jinjing Xu L.H. Xu Lin Xu Suting Xu Weixin Xu Xinbo Xu Xinran Xu Yangchuan Xu Yichang Xu Yuemeng Xu Zelai Xu Ziyao Xu Junjie Yan Yuzi Yan Guangyao Yang Hao Yang Junwei Yang Kai Yang Ningyuan Yang Ruihan Yang Xiaofei Yang Xinlong Yang Ying Yang Yi (弋) Yang Yi (翌) Yang Zhen Yang Zhilin Yang Zonghan Yang Haotian Yao Dan Ye Wenjie Ye Zhuorui Ye Bohong Yin Chengzhen Yu Longhui Yu Tao Yu † Tianxiang Yu Enming Yuan Mengjie Yuan Xiaokun Yuan Yang Yue Weihao Zeng Dunyuan Zha Haobing Zhan Dehao Zhang Hao Zhang Jin Zhang Puqi Zhang Qiao Zhang Rui Zhang Xiaobin Zhang Y. Zhang Yadong Zhang Yangkun Zhang Yichi Zhang Yizhi Zhang Yongting Zhang Yu Zhang Yushun Zhang Yutao Zhang Yutong Zhang Zheng Zhang Chenguang Zhao Feifan Zhao Jinxiang Zhao Shuai Zhao Xiangyu Zhao Yikai Zhao Zijia Zhao Huabin Zheng Ruihan Zheng Shaojie Zheng Tengyang Zheng Junfeng Zhong Longguang Zhong Weiming Zhong M. Zhou Runjie Zhou Xinyu Zhou Zaida Zhou Jinguo Zhu Liya Zhu Xinhao Zhu Yuxuan Zhu Zhen Zhu Jingze Zhuang Weiyu Zhuang Ying Zou Xinxing Zu Kimi K2 Kimi K2.5 footnotetext: The listing of authors is in alphabetical order based on their last names. footnotetext: † The University of Hong Kong
Appendix B Pre-training
<details>
<summary>x7.png Details</summary>
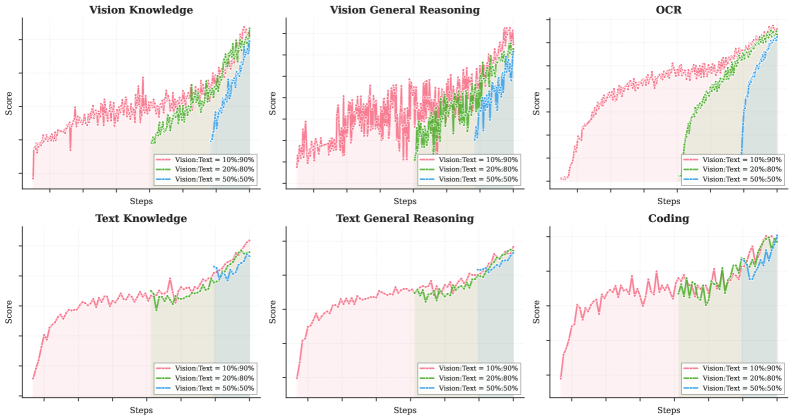
### Visual Description
## Chart: Performance Comparison Across Tasks
### Overview
The image presents a 2x3 grid of line charts, each depicting the performance "Score" against the number of "Steps" taken during training or evaluation. Each chart compares three data series representing different ratios of Vision to Text data (10%/90%, 20%/80%, and 50%/50%). The charts cover six different tasks: Vision Knowledge, Vision General Reasoning, OCR, Text Knowledge, Text General Reasoning, and Coding.
### Components/Axes
* **X-axis:** "Steps" - Represents the progression of training or evaluation. The scale is not explicitly labeled, but appears to range from approximately 0 to 1000.
* **Y-axis:** "Score" - Represents the performance metric. The scale ranges from approximately 0 to 1.0.
* **Legend:** Located at the bottom-right of each chart.
* "Vision:Text - 10%/90%" (represented by a red line with triangle markers)
* "Vision:Text - 20%/80%" (represented by a green line with circle markers)
* "Vision:Text - 50%/50%" (represented by a blue line with square markers)
* **Titles:** Each chart has a title indicating the task being evaluated: "Vision Knowledge", "Vision General Reasoning", "OCR", "Text Knowledge", "Text General Reasoning", and "Coding".
* **Grey Shaded Area:** A grey shaded area is present in each chart, spanning a portion of the x-axis. The purpose of this shading is not explicitly stated.
### Detailed Analysis or Content Details
**1. Vision Knowledge:**
* The blue line (50%/50%) shows a generally upward trend, starting around 0.2 and reaching approximately 0.8.
* The green line (20%/80%) starts around 0.2 and plateaus around 0.4.
* The red line (10%/90%) fluctuates around 0.3 with minimal improvement.
**2. Vision General Reasoning:**
* The blue line (50%/50%) shows a strong upward trend, starting near 0 and reaching approximately 0.9.
* The green line (20%/80%) shows a moderate upward trend, starting near 0 and reaching approximately 0.6.
* The red line (10%/90%) remains relatively flat, fluctuating around 0.2.
**3. OCR:**
* The blue line (50%/50%) shows a rapid increase initially, reaching approximately 0.9, then plateaus.
* The green line (20%/80%) shows a similar trend, but starts lower and reaches approximately 0.7.
* The red line (10%/90%) shows a slow increase, reaching approximately 0.5.
**4. Text Knowledge:**
* The blue line (50%/50%) shows a steady upward trend, starting around 0.3 and reaching approximately 0.8.
* The green line (20%/80%) shows a similar trend, starting around 0.2 and reaching approximately 0.6.
* The red line (10%/90%) fluctuates around 0.3 with minimal improvement.
**5. Text General Reasoning:**
* The blue line (50%/50%) shows a very strong upward trend, starting near 0 and reaching approximately 1.0.
* The green line (20%/80%) shows a moderate upward trend, starting near 0 and reaching approximately 0.7.
* The red line (10%/90%) remains relatively flat, fluctuating around 0.2.
**6. Coding:**
* The blue line (50%/50%) shows a fluctuating trend, starting around 0.3 and reaching approximately 0.7.
* The green line (20%/80%) shows a similar fluctuating trend, starting around 0.2 and reaching approximately 0.6.
* The red line (10%/90%) shows a fluctuating trend, starting around 0.2 and reaching approximately 0.4.
### Key Observations
* The 50%/50% Vision/Text ratio consistently outperforms the other ratios across all tasks.
* The 10%/90% Vision/Text ratio generally performs the worst, showing minimal improvement over the course of the steps.
* The grey shaded area appears to coincide with a period of rapid learning or change in performance for most tasks.
* The "Text General Reasoning" task shows the most significant performance improvement for the 50%/50% ratio, reaching a score of approximately 1.0.
* The "Vision General Reasoning" task also shows a strong performance improvement for the 50%/50% ratio.
### Interpretation
The data suggests that a balanced combination of Vision and Text data (50%/50%) leads to the best performance across a variety of tasks, including Vision Knowledge, Vision General Reasoning, OCR, Text Knowledge, Text General Reasoning, and Coding. The tasks involving "General Reasoning" (both Vision and Text) show the most dramatic improvements with the balanced data ratio, indicating that the model benefits from exposure to both modalities for complex reasoning tasks. The consistently poor performance of the 10%/90% ratio suggests that relying heavily on one modality (either Vision or Text) hinders the model's ability to learn and generalize. The grey shaded areas likely represent critical phases of learning where the model is making significant adjustments to its parameters. The OCR task shows a high ceiling, with the 50/50 ratio reaching near-perfect performance relatively quickly. The Coding task shows the least dramatic improvement, suggesting it may be a more challenging task or require a different training approach. The charts provide a comparative analysis of different data mixing strategies and their impact on model performance, offering insights into optimal training configurations for multimodal models.
</details>
Figure 9: Learning curves comparing vision-to-text ratios (10:90, 20:80, 50:50) under fixed vision-text token budget across vision and language tasks. Early fusion with lower vision ratios tend to yield better results.
B.1 Joint-Training
We further provide the full training curves for all configurations in Figure 9. Notably, we observe a "dip-and-recover" pattern in text performance during mid-fusion and late-fusion stages: when vision data is first introduced, text capability initially degrades before gradually recovering. We attribute this to the modality domain shift—the sudden introduction of vision tokens disrupts the established linguistic representation space, forcing the model to temporarily sacrifice text-specific competence for cross-modal alignment.
In contrast, early fusion maintains a healthier and more stable text performance curve throughout training. By co-optimizing vision and language from the outset, the model naturally evolves unified multimodal representations without the shock of late-stage domain migration. This suggests that early exposure not only prevents the representation collapse observed in late fusion but also facilitates smoother gradient landscapes for both modalities. Collectively, these findings reinforce our proposal of native multimodal pre-training: moderate vision ratios combined with early fusion yield superior convergence properties and more robust bi-modal competence under fixed token budgets.
B.2 Text data
The Kimi K2.5 pre-training text corpus comprises curated, high-quality data spanning four primary domains: Web Text, Code, Mathematics, and Knowledge. Most data processing pipelines follow the methodologies outlined in Kimi K2 [53]. For each domain, we performed rigorous correctness and quality validation and designed targeted data experiments to ensure the curated dataset achieved both high diversity and effectiveness.
Enhanced Code Intelligence We upweighted code-centric data, significantly expanding (1) repository-level code supporting cross-file reasoning and architectural understanding, (2) issues, code reviews and commit histories from the internet capturing real-world development patterns, and (3) code-related documents retrieved from PDF and webtext corpora. These efforts strengthen repository-level comprehension for complex coding tasks, improve performance on agentic coding subtasks such as patch generation and unit test writing, and enhance code-related knowledge capabilities.
B.3 Vision data
Our multimodal pre-training corpus includes seven categories: caption, interleaving, OCR, knowledge, perception, video, and agent data. Caption data [49, 18] provides fundamental modality alignment, with strict limits on synthetic captions to mitigate hallucination. Image-text interleaving data from books, web pages, and tutorials [81, 31] enables multi-image comprehension and longer context learning. OCR data spans multilingual text, dense layouts, and multi-page documents. Knowledge data incorporates academic materials processed via layout parsers to develop visual reasoning capabilities.
Furthermore, we curate a specialized multimodal problem-solving corpus to bolster reasoning within Science, Technology, Engineering, and Mathematics domains. This data is aggregated through targeted retrieval and web crawling; for informational content lacking explicit query formats, we employ in-context learning [10] to automatically reformulate raw materials into structured academic problems spanning K-12 to university levels. To bridge the modality gap between visual layouts and code data, we incorporate extensive image-code paired data. This includes a diverse array of code formats—such as HTML, React, and SVG, among others—paired with their corresponding rendered screenshots, enabling the model to align abstract structural logic with concrete visual geometry.
For agentic and temporal understanding, we collect GUI screenshots and action trajectories across desktop, mobile, and web environments, including human-annotated demonstrations. Video data from diverse sources enables both hour-long video comprehension and fine-grained spatio-temporal perception. Additionally, we incorporate grounding data to enhance fine-grained visual localization, including perception annotations (bounding boxes), point-based references. We also introduce a new contour-level segmentation task [51] for pixel-level perception learning. All data undergoes rigorous filtering, deduplication, and quality control to ensure high diversity and effectiveness.
Appendix C Infra
Kimi K2.5 is trained on NVIDIA H800 GPU clusters with 8 $×$ 400 Gbps RoCE interconnects across nodes. We employ a flexible parallelism strategy combining 16-way Pipeline Parallelism (PP) with virtual stages [26, 39], 16-way Expert Parallelism (EP) [32], and ZeRO-1 Data Parallelism, enabling training on any number of nodes that is a multiple of 32. EP all-to-all communication is overlapped with computation under interleaved 1F1B scheduling. To fit activations within GPU memory constraints, we apply selective recomputation for LayerNorm, SwiGLU, and MLA up-projections, compress insensitive activations to FP8-E4M3, and offload remaining activations to CPU with overlapped streaming.
C.1 Data Storage and Loading
We employ S3 [3] compatible object storage solutions from cloud providers to house our VLM datasets. To bridge the gap between data preparation and model training, we retain visual data in its native format and have engineered a highly efficient and adaptable data loading infrastructure. This infrastructure offers several critical advantages:
- Flexibility: Facilitates dynamic data shuffling, blending, tokenization, loss masking, and sequence packing throughout the training process, enabling adjustable data ratios as requirements evolve;
- Augmentation: Allows for stochastic augmentation of both visual and textual modalities, while maintaining the integrity of 2D spatial coordinates and orientation metadata during geometric transformations;
- Determinism: Guarantees fully deterministic training through meticulous management of random seeds and worker states, ensuring that any training interruption can be resumed seamlessly — the data sequence after resumption remains identical to an uninterrupted run;
- Scalability: Achieves superior data loading throughput via tiered caching mechanisms, robustly scaling to large distributed clusters while regulating request frequency to object storage within acceptable bounds.
Furthermore, to uphold uniform dataset quality standards, we have built a unified platform overseeing data registration, visualization, statistical analysis, cross-cloud synchronization, and lifecycle governance.
Appendix D Unified Agentic Reinforcement Learning Environment
<details>
<summary>x8.png Details</summary>
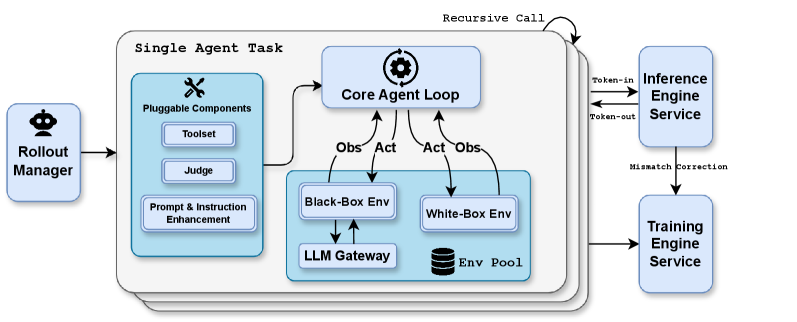
### Visual Description
\n
## Diagram: Single Agent Task Architecture
### Overview
This diagram illustrates the architecture of a single agent task, outlining the components and their interactions. The system consists of a "Rollout Manager", a central "Single Agent Task" block, an "Inference Engine Service", and a "Training Engine Service". The diagram emphasizes the iterative loop within the agent task and the flow of information between components.
### Components/Axes
The diagram features the following key components:
* **Rollout Manager:** Located on the left, depicted as a stylized head with a wrench.
* **Single Agent Task:** A large, central block containing several sub-components.
* **Core Agent Loop:** A central component with a gear icon.
* **Pluggable Components:** Contains "Toolset" and "Judge".
* **Prompt & Instruction Enhancement**
* **Black-Box Env:** Environment.
* **White-Box Env:** Environment.
* **LLM Gateway**
* **Env Pool:** Database icon.
* **Inference Engine Service:** Located on the right, receiving "Token-in" and sending "Token-out".
* **Training Engine Service:** Located at the bottom-right, receiving "Mismatch Correction".
* **Arrows:** Indicate the flow of information and control between components. Labels on arrows include "Recursive Call", "Obs", "Act", and "Mismatch Correction".
### Detailed Analysis or Content Details
The diagram shows a cyclical process within the "Single Agent Task".
1. **Rollout Manager** initiates the process.
2. The process flows into the **Single Agent Task**.
3. Within the **Core Agent Loop**, there's an iterative "Obs" (Observation) -> "Act" (Action) cycle.
4. The "Act" output from the Core Agent Loop feeds into both the **Black-Box Env** and the **White-Box Env**.
5. Both environments connect to the **LLM Gateway**.
6. The **LLM Gateway** connects to the **Env Pool** (database).
7. The **Inference Engine Service** receives "Token-in" and outputs "Token-out".
8. A "Recursive Call" arrow points from the **Core Agent Loop** to the **Inference Engine Service**.
9. The **Inference Engine Service** sends "Mismatch Correction" to the **Training Engine Service**.
The diagram does not contain numerical data or specific values. It is a conceptual representation of a system architecture.
### Key Observations
* The **Core Agent Loop** is central to the system, indicating its importance in the agent's operation.
* The presence of both **Black-Box Env** and **White-Box Env** suggests the agent can interact with environments of varying transparency.
* The **Recursive Call** indicates the agent can iteratively refine its actions based on feedback from the Inference Engine.
* The **Mismatch Correction** flow suggests a learning or adaptation mechanism within the system.
### Interpretation
The diagram depicts a sophisticated agent architecture designed for complex tasks. The agent operates within a loop, observing its environment, taking actions, and refining its behavior based on feedback. The use of both black-box and white-box environments suggests a flexible system capable of handling diverse scenarios. The inclusion of an LLM Gateway indicates the agent leverages large language models for reasoning and decision-making. The iterative nature of the process, combined with the mismatch correction mechanism, suggests a system capable of continuous learning and improvement. The diagram highlights a closed-loop system where the agent actively learns from its interactions with the environment and refines its actions over time. The Rollout Manager likely orchestrates the deployment and monitoring of these agents. The architecture is designed for adaptability and robustness, allowing the agent to handle uncertainty and complexity in its environment.
</details>
Figure 10: Overview of our agentic RL framework.
Environment
To support unified Agentic RL, our RL framework features a standardized Gym-like [9] interface to streamline the implementation of diverse environments. Such design empowers users to implement and customize environments with minimal overhead. Our design prioritizes compositional modularity by integrating a suite of pluggable components, such as a Toolset module for supporting various tools with sandboxes, a Judge module for multi-faceted reward signals, and specialized modules for prompt diversification and instruction-following enhancement. These components can be dynamically composed with core agent loops, offering high flexibility and enhancing model generalization.
At the execution level, our RL framework treats every agent task as an independent asynchronous coroutine. Each task can recursively trigger sub-task rollouts, simplifying the implementation of complex multi-agent paradigms such as Parallel-Agent RL and Agent-as-Judge. As shown in the figure 10, a dedicated Rollout Manager orchestrates up to 100,000 concurrent agent tasks during the RL process, providing fine-grained control to enable features like partial rollout [30]. Upon activation, each task acquires an environment instance from a managed pool, equipped with a sandbox and specialized tools.
Inference Engine Co-design
Our framework strictly follows a Token-in-Token-out paradigm. We also record log probabilities for all inference engine outputs to perform train-inference mismatch correction, ensuring stable RL training. A co-design of inference engine for RL requirements has allowed us to support these features by custom inference APIs for RL.
Besides a comprehensive suite of built-in white-box environments, there are also black-box environments that can only run under standard LLM API protocol, missing the opportunity to use advanced features offered by our custom API protocol. To facilitate model optimization under black-box environments, we developed LLM Gateway, which is a proxy service that keeps detailed records of rollout requests and responses under our custom protocol.
Monitoring and debugging
It is a challenging task to optimize performance of a highly-parallel asynchronous execution system, while ensuring correctness. We develop a series of tools for performance monitoring, profiling, data visualization and data verification. We found these to be instrumental in debugging and ensuring both the efficiency and correctness of our Agentic RL.
Appendix E Evaluation Settings
This section provides comprehensive configuration details and testing protocols for all benchmarks reported in Table 4.
E.1 General Evaluation Protocol
Unless explicitly stated otherwise, all experiments for Kimi-K2.5 adhere to the following hyperparameter configuration:
- Temperature: $1.0$
- Top-p: $0.95$
- Context Length: $256\text{k}$ tokens
E.2 Baselines
For baseline models, we report results under their respective high-performance reasoning configurations:
- Claude Opus 4.5: Extended thinking mode
- GPT-5.2: Maximum reasoning effort (xhigh)
- Gemini 3 Pro: High thinking level
- DeepSeek-V3.2: Thinking mode enabled (for text-only benchmarks)
- Qwen3-VL-235B-A22B: Thinking mode (for vision benchmarks only)
For vision and multimodal benchmarks, GPT-5.2-xhigh exhibited an approximate 10% failure rate (i.e., no output generated despite three retry attempts) during vision evaluations. These failures were treated as incorrect predictions, meaning that the reported scores may be conservative lower bounds of the model’s true capability.
In addition, because we were unable to consistently access a stable GPT-5.2 API, we skipped some benchmarks with high evaluation costs, such as WideSearch.
E.3 Text Benchmarks
Reasoning Benchmarks.
For high-complexity reasoning benchmarks, including HLE-Full, AIME 2025, HMMT 2025, GPQA-Diamond, and IMO-AnswerBench, we enforce a maximum completion budget of $96\text{k}$ tokens to ensure sufficient reasoning depth. To reduce variance arising from stochastic reasoning paths, results on AIME 2025 and HMMT 2025 (Feb) are averaged over 64 independent runs (Avg@64), while GPQA-Diamond is averaged over 8 runs (Avg@8).
LongBench v2.
For a fair comparison, we standardize all input contexts to approximately $128\text{k}$ tokens using the same truncation strategy as in [8]. We observe that GPT5.2-xhigh frequently produces free-form question–answer style responses rather than the required multiple-choice format. Therefore, we report results using GPT5.2-high, which consistently adheres to the expected output format.
E.4 Image and Video Benchmarks
All image and video understanding evaluations utilize the following configuration:
- Maximum Tokens: $64\text{k}$
- Sampling: Averaged over 3 independent runs (Avg@3)
ZeroBench (w/ tools).
Multi-step reasoning evaluations use constrained step-wise generation:
- Max Tokens per Step: $24\text{k}$
- Maximum Steps: $30$
MMMU-Pro.
We adhere strictly to the official evaluation protocol: input order is preserved for all modalities, with images prepended to text sequences as specified in the benchmark guidelines.
Sampling Strategies for Video Benchmarks.
For short video benchmarks (VideoMMMU, MMVU & MotionBench), we sample 128 uniform input frames with a maximum spatial resolution at 896; 2048 uniform frames are sampled for long video benchmarks (Video-MME, LongVideoBench & LVBench) with 448 spatial resolution.
Specialized Metrics.
- OmniDocBench 1.5: Scores are computed as $(1-\text{normalized Levenshtein distance})× 100$ , where higher values indicate superior OCR and document understanding accuracy.
- WorldVQA: Access available at https://github.com/MoonshotAI/WorldVQA. This benchmark evaluates atomic, vision-centric world knowledge requiring fine-grained visual recognition and geographic understanding.
E.5 Coding and Software Engineering
Terminal Bench 2.0.
All scores are obtained using the default Terminus-2 agent framework with the provided JSON parser. Notably, we evaluate under non-thinking mode because our current context management implementation for thinking mode is technically incompatible with Terminus-2’s conversation state handling.
SWE-Bench Series.
We employ an internally developed evaluation framework featuring a minimal tool set: bash, create_file, insert, view, str_replace, and submit. System prompts are specifically tailored for repository-level code manipulation. Peak performance is achieved under non-thinking mode across all SWE-Bench variants (Verified, Multilingual, and Pro).
CyberGym.
Claude Opus 4.5 results for this benchmark are reported under non-thinking settings as specified in their technical documentation. We report scores in the difficulty level 1 (the primary setting).
PaperBench.
We report the scores under the CodeDev setting.
Sampling.
All coding task results are averaged over 5 independent runs (Avg@5) to ensure stability across environment initialization and non-deterministic test case ordering.
E.6 Agentic Evaluation
Tool Setting.
Kimi-K2.5 is equipped with web search tool, code interpreter (Python execution environment), and web browsing tools for all agentic evaluations, including HLE with tools and agentic search benchmarks (BrowseComp, WideSearch, DeepSearchQA, FinSearchComp T2&T3 and Seal-0).
Context Management Strategies.
To handle the extended trajectory lengths inherent in complex agentic tasks, we implement domain-specific context management protocols. Unless otherwise specified below, no context management is applied to agentic evaluations; tasks exceeding the model’s supported context window are directly counted as failures rather than truncated.
- Humanity’s Last Exam (HLE). For the HLE tool-augmented setting, we employ a Hide-Tool-Result Context Management strategy: when the context length exceeds predefined thresholds, only the most recent round of tool messages (observations and return values) is retained, while the reasoning chain and thinking processes from all previous steps are preserved in full.
- BrowseComp. For BrowseComp evaluations, our evaluation contains both with and without context management settings. Under the context management setting, we adopt the same discard-all strategy proposed by DeepSeek, where all history is truncated once token thresholds are exceeded.
System Prompt.
All agentic search and HLE evaluations utilize the following unified system prompt, where DATE is dynamically set to the current timestamp:
You are Kimi, today’s date: DATE. Your task is to help the user with their questions by using various tools, thinking deeply, and ultimately answering the user’s questions. Please follow the following principles strictly during the deep research: 1. Always focus on the user’s original question during the research process, avoiding deviating from the topic. 2. When facing uncertain information, use search tools to confirm. 3. When searching, filter high-trust sources (such as authoritative websites, academic databases, and professional media) and maintain a critical mindset towards low-trust sources. 4. When performing numerical calculations, prioritize using programming tools to ensure accuracy. 5. Please use the format [^index^] to cite any information you use. 6. This is a **Very Difficult** problemdo not underestimate it. You must use tools to help your reasoning and then solve the problem. 7. Before you finally give your answer, please recall what the question is asking for.
Sampling Protocol.
To account for the inherent stochasticity in search engine result rankings and dynamic web content availability, results for Seal-0 and WideSearch are averaged over 4 independent runs (Avg@4). All other agentic benchmarks are evaluated under single-run protocols unless explicitly stated otherwise.
E.7 Computer-Use Evaluation
Hyperparameter Settings.
We set $\texttt{max\_steps\_per\_episode}=100$ for all experiments, with $\texttt{temperature}=0$ for OSWorld-Verified and $\texttt{temperature}=0.1$ for WebArena. Due to resource constraints, all models are evaluated in a one-shot setting. Adhering to the OpenCUA configuration [63], the agent context includes the last 3 history images, the complete thought history, and the task instruction. For WebArena, we manually corrected errors in the evaluation scripts and employed GPT-4o as the judge model for the fuzzy_match function. To ensure fair comparison, Claude Opus 4.5 is evaluated solely with computer-use tools (excluding browser tools), a departure from the System Card configuration [4].
System Prompt
We utilize a unified system prompt for all computer use tasks: You are a GUI agent. You are given an instruction, a screenshot of the screen and your previous interactions with the computer. You need to perform a series of actions to complete the task. The password of the computer is {password}. For each step, provide your response in this format: {thought} ## Action: {action} ## Code: {code} In the code section, the code should be either pyautogui code or one of the following functions wrapped in the code block: - {"name": "computer.wait", "description": "Make the computer wait for 20 seconds for installation, running code, etc.", "parameters": {"type": "object", "properties": {}, "required": []}} - {"name": "computer.terminate", "description": "Terminate the current task and report its completion status", "parameters": {"type": "object", "properties": {"status": {"type": "string", "enum": ["success", "failure"], "description": "The status of the task"}, "answer": {"type": "string", "description": "The answer of the task"}}, "required": ["status"]}}
E.8 Agent Swarm Configuration
Tool Setting.
In addition to the core toolset described in Appendix E.6 (web search, code interpreter, and web browsing), the orchestrator is equipped with two specialized tools for sub-agent creation and scheduling:
- create_subagent: Instantiates a specialized sub-agent with a custom system prompt and identifier for reuse across tasks.
- assign_task: Dispatches assignments to created sub-agents.
The tool schemas are provided below:
{ "name": "create_subagent", "description": "Create a custom subagent with specific system prompt and name for reuse.", "parameters": { "type": "object", "properties": { "name": { "type": "string", "description": "Unique name for this agent configuration" }, "system_prompt": { "type": "string", "description": "System prompt defining the agent’s role, capabilities, and boundaries" } }, "required": ["name", "system_prompt"] } } { "name": "assign_task", "description": "Launch a new agent.\nUsage notes:\n 1. You can launch multiple agents concurrently whenever possible, to maximize performance;\n 2. When the agent is done, it will return a single message back to you.", "parameters": { "type": "object", "properties": { "agent": { "type": "string", "description": "Specify which created agent to use." }, "prompt": { "type": "string", "description": "The task for the agent to perform" } }, "required": ["agent", "prompt"] } }
Step Limits.
When operating in Agent Swarm mode, we set computational budgets for the orchestrator and sub-agents. Step limits apply to the aggregate count of tool invocations and environment interactions.
- BrowseComp: The orchestrator is constrained to a maximum of 15 steps. Each spawned sub-agent operates under a limit of 100 steps (i.e., up to 100 tool calls per sub-agent).
- WideSearch: Both the orchestrator and each sub-agent are allocated a maximum budget of 100 steps.
- In-house Bench: The orchestrator is constrained to a maximum of 100 steps. Each spawned sub-agent operates under a limit of 50 steps .
System Prompt.
You are Kimi, a professional and meticulous expert in information collection and organization. You fully understand user needs, skillfully use various tools, and complete tasks with the highest efficiency. # Task Description After receiving users’ questions, you need to fully understand their needs and think about and plan how to complete the tasks efficiently and quickly. # Available Tools To help you complete tasks better and faster, I have provided you with the following tools: 1. Search tool: You can use the search engine to retrieve information, supporting multiple queries in parallel. 2. Browser tools: You can visit web links (web pages, PDFs, etc.), get page content, and perform interactions such as clicking, inputting, finding, and scrolling. 3. Sub Agent tools: - ‘create_subagent‘: Create a new sub-agent with a unique name and clear, specific system prompt. - ‘assign_task‘: Delegate tasks to created sub-agents. Sub-agents can also use search and browser tools. 4. Other tools: Including code execution (IPython, Shell).
E.9 GDPVal
We cite the GDPVal-AA evaluation by Artificial Analysis, and the scores reported in Table 4 reflect the official leaderboard metrics as of January 28, 2026.
<details>
<summary>x9.png Details</summary>
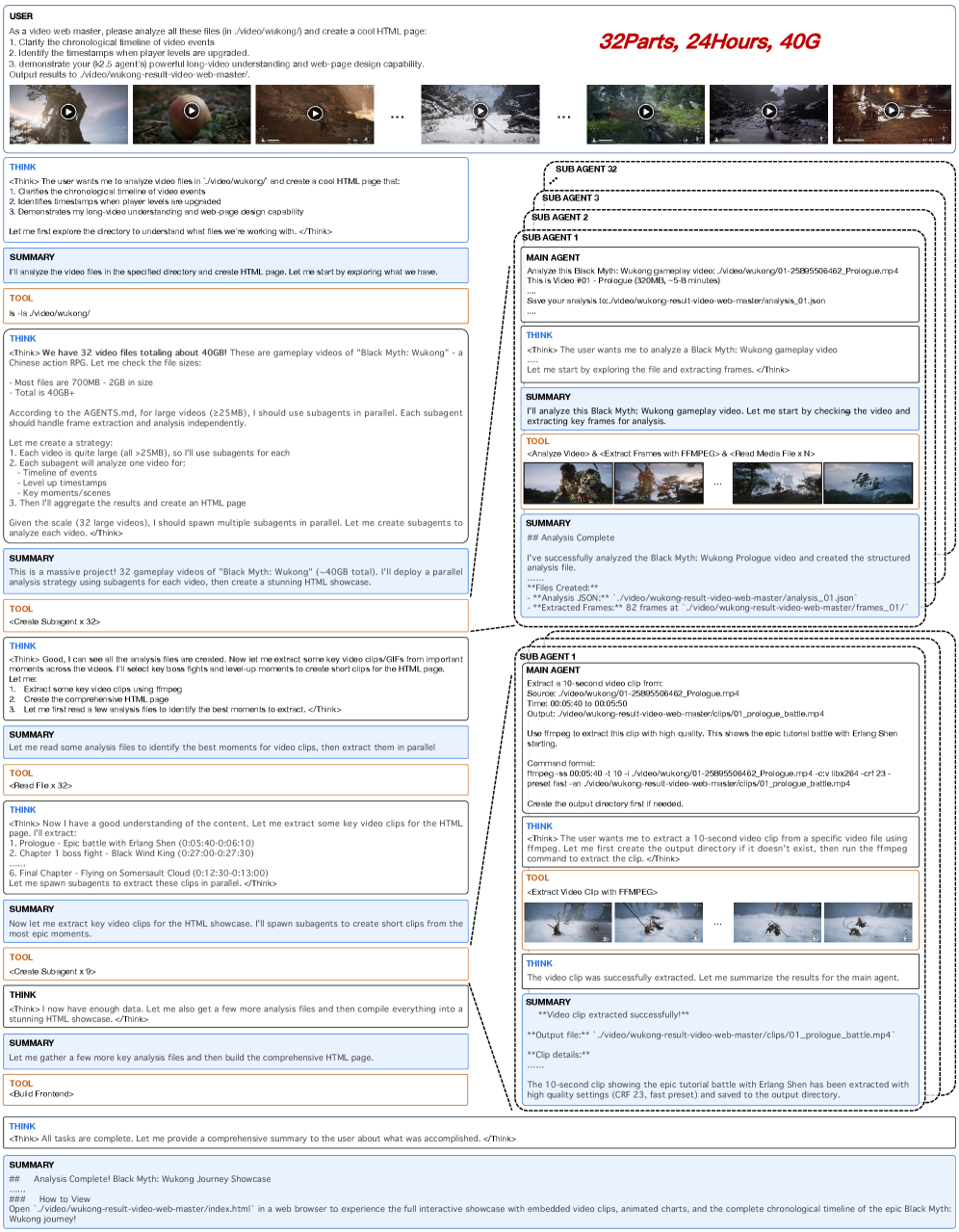
### Visual Description
\n
## Diagram: AI Agent Workflow for Video Analysis
### Overview
This diagram illustrates a workflow for analyzing video files using multiple AI agents, each performing a specific task in parallel. The diagram depicts a user initiating the process, followed by the distribution of tasks to several "SUB AGENT" instances, and finally, the consolidation of results. The overall process is framed within a time constraint of "32 Parts, 24 Hours, 40G".
### Components/Axes
The diagram is structured into several sections:
* **Header:** "32Parts, 24Hours, 40G" - likely representing computational resources and time limits.
* **User Input:** A text box labeled "USER" containing instructions for the AI.
* **"THINK" Boxes:** Representing the AI's reasoning process, with text inside.
* **"SUMMARY" Boxes:** Representing the AI's output or task description.
* **"TOOL" Boxes:** Representing the tools used by the AI.
* **SUB AGENT Blocks:** Multiple blocks labeled "SUB AGENT 1", "SUB AGENT 2", etc., representing individual AI agents.
* **MAIN AGENT Block:** A larger block labeled "MAIN AGENT", likely responsible for coordinating the sub-agents.
* **Output:** A text box labeled "OUTPUT" containing the final result.
* **File Path:** "/home/video/wukong/" is mentioned repeatedly, indicating the directory being analyzed.
### Detailed Analysis or Content Details
Here's a transcription of the text within each section, organized by block:
**USER:**
"As a video web master, please analyze all these files in /home/video/wukong/ and create a cool HTML page:
1. Create the chronological timeline of video events
2. Extract key frame of each video events
3. Demonstrate my 92.5 agent's powerful long-video understanding and web page design capability.
Output result as /home/video/wukong/ result video web master."
**THINK (1):**
"-Thanks The user wants me to analyze video files in /home/video/wukong/ and create a cool HTML page that:
- Create the chronological timeline of video events
- Extract key frame of each video events
- Demonstrate my long-video understanding and web-page design capability.
Let me start by exploring the directory to understand what files we are working with. ; Think"
**SUMMARY (1):**
"I'll analyze the video files in the specified directory and create HTML page. Let me start by exploring what we have."
**TOOL (1):**
"ls -la /home/video/wukong/"
**THINK (2):**
"-Thanks We have 32 video files totaling about 40GB. These are gameplay videos of "Black Myth: Wukong" - a popular title. Let's list the files and check the size.
- Total size is 40GB.
- Total is 40GB."
**SUMMARY (2):**
"I have 32 video files totaling 40GB size. These are gameplay videos of "Black Myth: Wukong". Let me start by checking the video and extracting key frames for analysis."
**TOOL (2):**
"du -hs /home/video/wukong/* | sort -rh | head -n 32"
**THINK (3):**
"-Thanks The video files are large, for video size(>25MB), I should use subagents in parallel. Each subagent should handle frame extraction and video independently.
- Each video is quite large (8-25MB), so I should use subagents in parallel.
- Each subagent will handle frame extraction and video independently.
- I will create a workflow to distribute the workload among the subagents. Let me create 4 subagents to handle the videos."
**SUMMARY (3):**
"I will create 4 subagents to handle frame extraction and video analysis in parallel. Let me create the subagents and assign the workload."
**TOOL (3):**
"for i in {1..4}; do echo "Creating subagent $i"; done"
**SUB AGENT 1:**
"Analyze the Black Myth: Wukong gameplay video: /home/video/wukong/31-2550550832-ProloguePart1.mp4
Extract key frames for analysis."
**SUB AGENT 2:**
"Analyze the Black Myth: Wukong gameplay video: /home/video/wukong/31-2550550832-ProloguePart2.mp4
Extract key frames for analysis."
**SUB AGENT 3:**
"Analyze the Black Myth: Wukong gameplay video: /home/video/wukong/31-2550550832-ProloguePart3.mp4
Extract key frames for analysis."
**SUB AGENT 4:**
"Analyze the Black Myth: Wukong gameplay video: /home/video/wukong/31-2550550832-ProloguePart4.mp4
Extract key frames for analysis."
**MAIN AGENT:**
"Coordinate the subagents and collect the results.
- Collect key frames from each subagent.
- Create a chronological timeline of video events.
- Generate an HTML page with the timeline and key frames."
**THINK (4):**
"-Thanks I have collected the key frames and timeline from the subagents. Now I need to create an HTML page to present the results.
- I will use a simple HTML template with JavaScript to display the timeline and key frames.
- I will include the key frames and timeline in the HTML page."
**SUMMARY (4):**
"I have collected the key frames and timeline from the subagents. Let me create an HTML page to present the results."
**TOOL (4):**
"echo "Creating HTML page..." > /home/video/wukong/result video web master.html"
**OUTPUT:**
"/home/video/wukong/result video web master.html"
### Key Observations
* The workflow is heavily parallelized, utilizing four "SUB AGENT" instances to process the video files concurrently.
* The "THINK" boxes demonstrate a chain-of-thought reasoning process, where the AI explains its actions before executing them.
* The "TOOL" boxes reveal the specific commands used by the AI (e.g., `ls`, `du`, `sort`, `head`).
* The file paths consistently point to the `/home/video/wukong/` directory.
* The "32 Parts, 24 Hours, 40G" header suggests resource constraints and a time limit for the analysis.
* The video files are identified as gameplay footage of "Black Myth: Wukong".
### Interpretation
This diagram depicts a sophisticated AI-driven workflow for video analysis. The use of multiple agents working in parallel suggests a focus on efficiency and scalability. The "THINK" and "SUMMARY" boxes highlight the AI's ability to reason about its tasks and communicate its progress. The specific tools used (command-line utilities) indicate a potentially Linux-based environment. The overall goal is to create a user-friendly HTML page summarizing the key events and visual highlights of the "Black Myth: Wukong" gameplay videos. The "32 Parts, 24 Hours, 40G" constraint suggests a need to optimize the process for performance within limited resources. The workflow demonstrates a clear division of labor, with sub-agents handling individual video files and a main agent coordinating the overall process. The diagram provides a high-level overview of the system's architecture and functionality, rather than detailed technical specifications. It's a conceptual illustration of an automated video analysis pipeline.
</details>
Figure 11: Qualitative example of Kimi K2.5 analyzing a complete playthrough of Black Myth: Wukong (24 hours of continuous gameplay across 32 videos at 1080p) using parallel visual agents. See generated webpage and source videos (all rights reserved by source authors).
<details>
<summary>x10.png Details</summary>
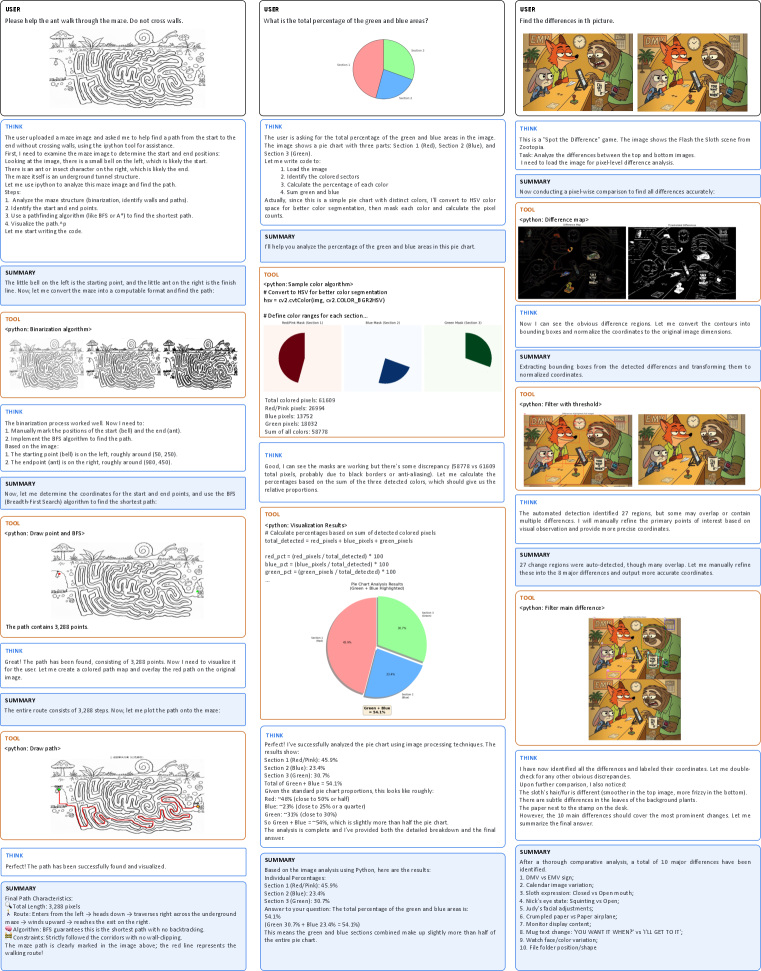
### Visual Description
\n
## Image Analysis: Maze Solving & Image Comparison Tasks
### Overview
The image presents a collection of problem statements and associated "THINK" and "SUMMARY" sections, seemingly related to computer vision and image processing tasks. The tasks involve maze solving, area calculation, and difference detection between images. The layout is a grid-like structure with each task occupying a distinct rectangular section. The image also includes code snippets (Python) related to the maze solving task. There are also several images used as input for the tasks.
### Components/Axes
The image is divided into several sections, each representing a different task. Each task section contains:
* **Problem Statement:** A textual description of the task.
* **THINK:** A section outlining the thought process or approach to solving the task.
* **SUMMARY:** A concise summary of the solution or findings.
* **Images:** Visual input for the task (mazes, image pairs).
* **Code Snippets:** Python code related to the maze solving task.
The tasks are:
1. **Maze Solving:** "Please help the ant walk through the maze..."
2. **Area Calculation:** "What is the total percentage of the green and blue areas?"
3. **Difference Detection:** "Find the differences in the picture."
4. **Further Difference Detection:** Another difference detection task with different images.
5. **Image Transformation:** "Now let's see the obvious difference regions. Let me convert the contours in the following image and summarize the smoothlines in the original image."
6. **Image Filtering:** "Synthesize filter with smoothlines."
### Detailed Analysis or Content Details
**1. Maze Solving:**
* The task involves finding a path for an ant through a maze.
* The "THINK" section suggests using an image and code to help find the path from the start to the end without crossing walls.
* The "SUMMARY" states the ant starts on the left and ends on the right.
* **Code Snippet:**
* `python`
* `import numpy as np`
* `maze = np.array([[1,1,1,1,1],[1,0,0,0,1],[1,1,1,0,1],[1,0,0,0,1],[1,1,1,1,1]])`
* `start = (1,1)`
* `end = (3,3)`
* `def solve_maze(maze, start, end):`
* ` # Implementation details omitted`
* ` return path`
**2. Area Calculation:**
* The task is to calculate the total percentage of green and blue areas in an image.
* The "THINK" section describes a process of dividing the image into three parts (left, section 2, right) and calculating the area of each color.
* **Data:**
* Total colored area: 61,609
* Cyan area: 13,662
* Yellow area: 17,336
* Magenta area: 16,107
* Red area: 14,504
* The percentages are calculated based on the total colored area.
**3. Difference Detection (First Instance):**
* The task is to find the differences between two images.
* The "THINK" section mentions using a "spot the difference" game.
* The "SUMMARY" states conducting a pixel-wise comparison to find all differences accurately.
**4. Difference Detection (Second Instance):**
* Similar to the previous task, this involves finding differences between two images.
* The "SUMMARY" states converting the contours and summarizing the smoothlines.
**5. Image Transformation:**
* The task involves identifying and converting contours in an image.
* The "SUMMARY" states converting the detected differences and transforming them to smoothlines.
**6. Image Filtering:**
* The task is to synthesize a filter with smoothlines.
* The "SUMMARY" states synthesizing a filter with smoothlines.
### Key Observations
* The tasks progressively increase in complexity, starting with a relatively simple maze-solving problem and moving towards more advanced image processing tasks like difference detection and image filtering.
* The use of Python code suggests a computational approach to solving these problems.
* The "THINK" and "SUMMARY" sections provide valuable insights into the problem-solving process.
* The image quality is moderate, but sufficient to understand the content.
### Interpretation
The image demonstrates a series of computer vision tasks, likely intended for educational or research purposes. The tasks cover fundamental concepts such as pathfinding, image segmentation (area calculation), and image comparison. The inclusion of code snippets suggests a practical, hands-on approach to learning these concepts. The progression of tasks indicates a learning curve, starting with simpler problems and gradually introducing more complex challenges. The emphasis on "THINK" and "SUMMARY" sections highlights the importance of problem-solving strategies and clear communication of results. The tasks are well-defined and provide a clear framework for understanding the underlying principles of computer vision. The image serves as a visual guide to a series of image processing challenges, showcasing both the problem statements and the proposed solutions. The use of color in the area calculation task is a visual aid to understanding the distribution of different colors within the image. The difference detection tasks demonstrate the ability to identify subtle changes between images, a crucial skill in many computer vision applications.
</details>
Figure 12: Qualitative examples of Kimi K2.5 solving visual reasoning tasks via tool use.
Appendix F Visualization
Figure 11 demonstrates our Agent Swarm tackling a challenging long-form video understanding task: analyzing a complete playthrough of Black Myth: Wukong (24 hours of continuous gameplay across 32 videos, totaling 40GB). The system employs a hierarchical multi-agent architecture where a Main Agent orchestrates parallel Sub Agents to process individual video segments independently. Each sub agent performs frame extraction, temporal event analysis, and key moment identification (e.g., boss fights, level-ups). The Main Agent subsequently aggregates these distributed analyses to synthesize a comprehensive HTML showcase featuring chronological timelines, embedded video clips, and interactive visualizations. This example demonstrates the system’s ability to handle massive-scale multimodal content through parallelization while maintaining coherent long-context understanding.
Figure 12 presents qualitative examples of Kimi K2.5 solving diverse visual reasoning tasks via tool-augmented reasoning. The model demonstrates: (1) Maze Solving—processing binary image segmentation and implementing pathfinding algorithms (BFS) to navigate complex mazes; (2) Pie Chart Analysis—performing pixel-level color segmentation and geometric calculations to determine precise area proportions; and (3) Spot-the-Difference—employing computer vision techniques to detect pixel-level discrepancies between image pairs. These examples highlight the model’s capability to decompose complex visual problems into executable code, iteratively refine strategies based on intermediate results, and synthesize precise answers through quantitative visual analysis.