## Diagram: Robotic Task Execution System
### Overview
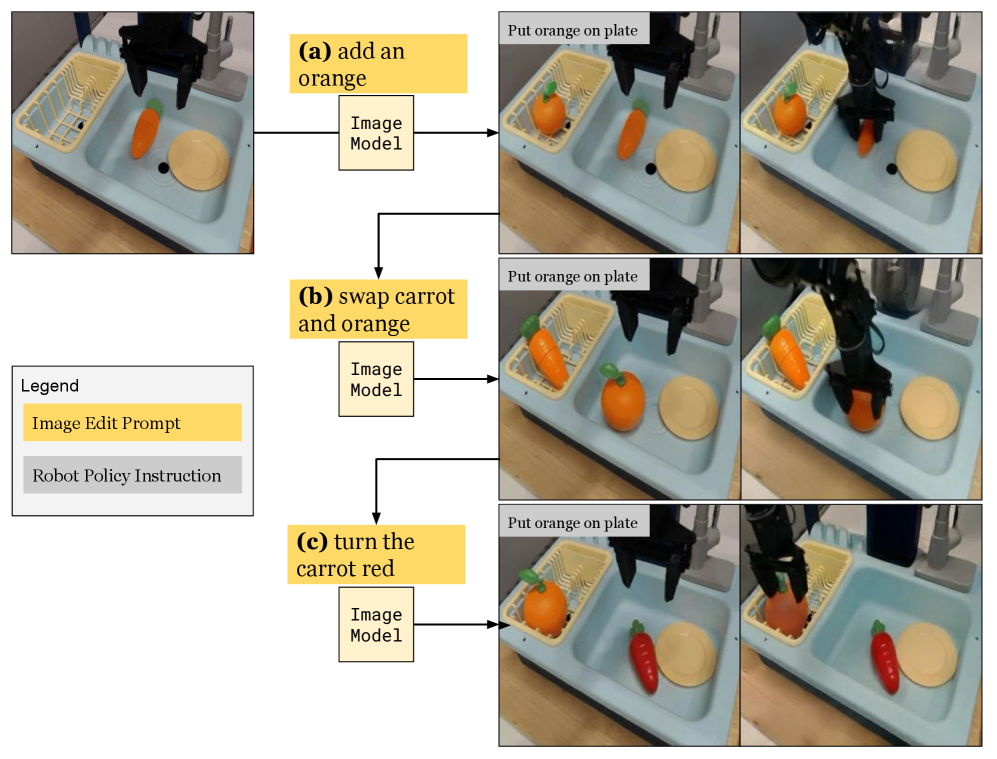
The diagram illustrates a robotic system performing three distinct tasks in a simulated kitchen environment. It demonstrates the integration of image processing models with robotic policy instructions to manipulate objects (orange, carrot, plate) within a sink setup. The system uses color-coded prompts to differentiate between image edit instructions and robot policy commands.
### Components/Axes
1. **Legend** (left side):
- **Image Edit Prompt** (yellow): Represents task-specific instructions for image manipulation
- **Robot Policy Instruction** (gray): Indicates the robotic action to be executed
2. **Task Structure** (vertical flow):
- Each task (a, b, c) contains:
- Input image of the sink environment
- Image model processing
- Output robot policy instruction
- Execution result image
3. **Spatial Layout**:
- Legend positioned in bottom-left quadrant
- Task components arranged in three vertical columns
- Robot arm shown in action across all task executions
### Detailed Analysis
1. **Task (a): Add an orange**
- Image Model Input: Sink with plate and carrot
- Robot Policy: "Put orange on plate"
- Execution: Orange placed in dish rack
2. **Task (b): Swap carrot and orange**
- Image Model Input: Sink with orange and carrot
- Robot Policy: "Put orange on plate"
- Execution: Orange moved to dish rack, carrot placed in sink
3. **Task (c): Turn the carrot red**
- Image Model Input: Sink with orange and carrot
- Robot Policy: "Put orange on plate"
- Execution: Carrot color changed to red while maintaining position
### Key Observations
- All tasks share the same robot policy instruction ("Put orange on plate") despite different objectives
- Color coding strictly follows legend: yellow for image prompts, gray for robot policies
- Robot arm maintains consistent positioning across all task executions
- Object positions change according to task requirements while maintaining spatial relationships
### Interpretation
This diagram demonstrates a vision-guided robotic system capable of:
1. Interpreting task descriptions through image models
2. Generating appropriate robotic actions based on environmental context
3. Executing complex object manipulations (addition, swapping, color modification)
The system shows:
- **Task-Image-Execution Correlation**: Each task's image model output directly informs the robot's physical action
- **Color-Coded Workflow**: Visual distinction between planning (yellow) and execution (gray) phases
- **Environmental Adaptation**: Maintains object relationships while performing specific manipulations
Notable patterns include the consistent use of the same robot policy instruction across different tasks, suggesting either a limitation in the system's task interpretation or a deliberate design choice for demonstration purposes. The color modification task (c) implies potential integration with computer vision systems capable of object recognition and property alteration.