\n
## Image Analysis: 3D Reconstruction Comparison
### Overview
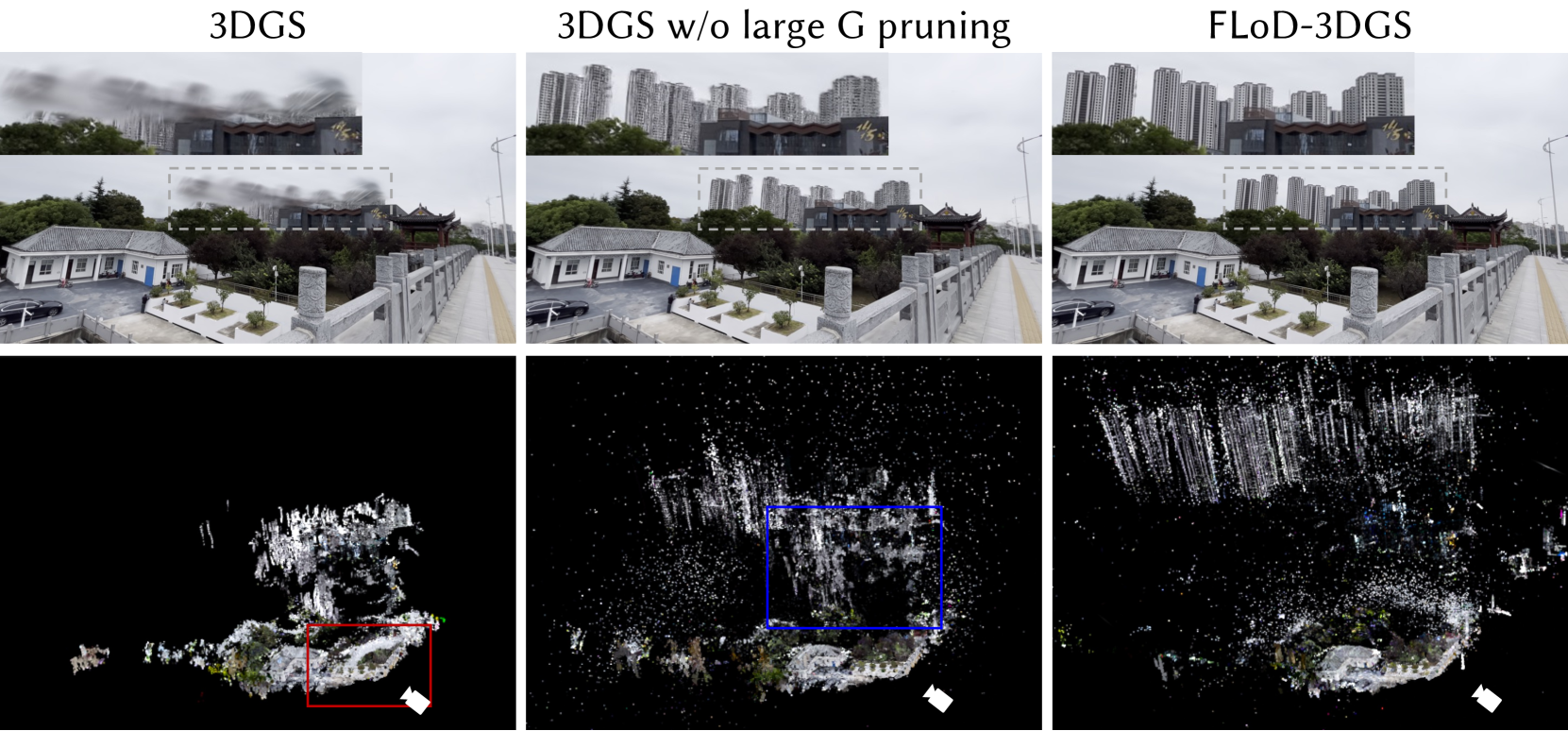
The image presents a comparative visual analysis of three different 3D reconstruction methods: 3DGS, 3DGS without large G pruning, and FLOD-3DGS. Each method is demonstrated through two views: a photograph-like rendering of the scene and a point cloud representation of the reconstructed 3D model. The point cloud visualizations include a red bounding box in the first two images, highlighting a specific region of interest.
### Components/Axes
The image is structured as a 2x3 grid. Each column represents a different reconstruction method. The top row shows rendered views, and the bottom row shows point cloud representations. The titles of each column are: "3DGS", "3DGS w/o large G pruning", and "FLOD-3DGS". There are no explicit axes or legends beyond these titles.
### Detailed Analysis or Content Details
The image does not contain numerical data or precise measurements. The analysis is based on visual comparison of the reconstructed scenes.
**3DGS:**
* **Rendered View:** Shows a scene with a building, a wall with decorative elements, and some vegetation. There is a significant amount of visual noise or artifacts appearing as a smoky haze in the upper portion of the image.
* **Point Cloud:** Displays a dense point cloud representing the reconstructed 3D geometry. A red bounding box is present, encompassing a portion of the reconstructed scene.
**3DGS w/o large G pruning:**
* **Rendered View:** Similar to the 3DGS rendering, showing the building, wall, and vegetation. The visual noise/artifacts are noticeably reduced compared to the 3DGS rendering.
* **Point Cloud:** Displays a point cloud, also with a red bounding box around a similar region as in the 3DGS point cloud. The point cloud appears slightly less dense than the 3DGS point cloud.
**FLOD-3DGS:**
* **Rendered View:** Shows the scene with the building, wall, and vegetation. The visual noise/artifacts are minimal, resulting in a clearer rendering.
* **Point Cloud:** Displays a point cloud. The point cloud appears more sparse than the other two, but also appears to have a more refined structure. No red bounding box is present.
### Key Observations
* The 3DGS method exhibits significant visual noise in the rendered view, which translates to a dense but potentially inaccurate point cloud.
* Removing large G pruning in the 3DGS method reduces the noise in the rendered view and results in a slightly less dense point cloud.
* FLOD-3DGS produces the cleanest rendered view and a more refined, though sparser, point cloud.
* The red bounding box in the 3DGS and 3DGS w/o large G pruning point clouds suggests a focus on evaluating the reconstruction quality in a specific area.
### Interpretation
The image demonstrates a comparison of different 3D reconstruction techniques. The results suggest that FLOD-3DGS offers the best visual quality and potentially the most accurate reconstruction, as evidenced by the clear rendered view and refined point cloud. The 3DGS method, while producing a dense point cloud, suffers from significant noise. Removing large G pruning improves the visual quality but slightly reduces the density of the reconstruction.
The presence of the red bounding box indicates that the researchers are particularly interested in the reconstruction accuracy within that specific region. The sparser point cloud of FLOD-3DGS might indicate a level-of-detail (LOD) approach, where detail is prioritized in certain areas while reducing complexity in others.
The image is a qualitative comparison, and lacks quantitative metrics. However, the visual differences are substantial and suggest that FLOD-3DGS is the most promising method among the three presented. The image serves as a visual demonstration of the trade-offs between reconstruction density, noise reduction, and computational efficiency in 3D reconstruction.