## Bar Chart: Effect of OOD Distractors on Success Rates
### Overview
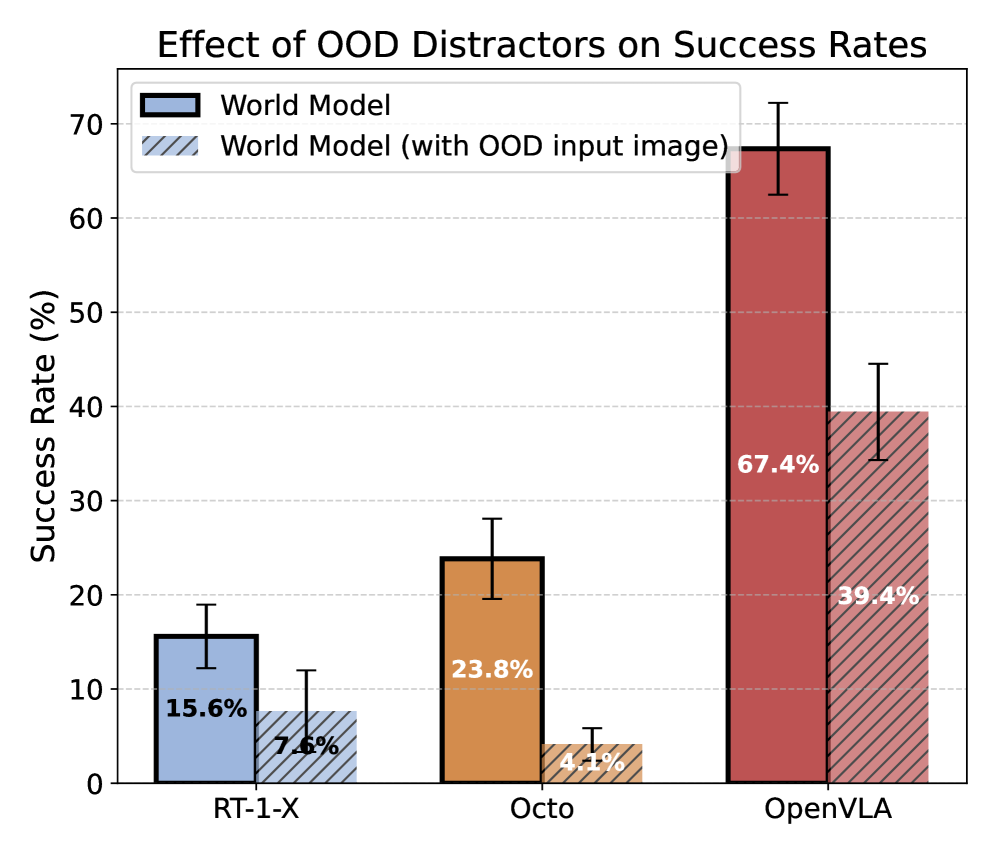
The chart compares success rates (%) of two model variants ("World Model" and "World Model (with OOD input image)") across three categories: RT-1-X, Octo, and OpenVLA. Success rates are visualized as grouped bars with error bars, and the chart emphasizes the impact of OOD distractors on performance.
### Components/Axes
- **X-axis**: Categories (RT-1-X, Octo, OpenVLA)
- **Y-axis**: Success Rate (%) ranging from 0 to 70%
- **Legend**:
- Solid blue: World Model
- Striped red: World Model (with OOD input image)
- **Error Bars**: Present on all bars, indicating variability (exact error values not labeled).
### Detailed Analysis
1. **RT-1-X**:
- World Model: 15.6% (solid blue bar)
- World Model (with OOD input image): 7.6% (striped red bar)
- **Trend**: Success rate decreases by ~53% when OOD input is added.
2. **Octo**:
- World Model: 23.8% (solid blue bar)
- World Model (with OOD input image): 4.1% (striped red bar)
- **Trend**: Success rate drops by ~83% with OOD input.
3. **OpenVLA**:
- World Model: 67.4% (solid blue bar)
- World Model (with OOD input image): 39.4% (striped red bar)
- **Trend**: Success rate decreases by ~42% with OOD input.
### Key Observations
- **Inverse Relationship**: In all categories, adding OOD input images reduces success rates.
- **Magnitude of Impact**:
- Octo shows the steepest decline (~83%).
- RT-1-X has a moderate decline (~53%).
- OpenVLA has the smallest decline (~42%).
- **Error Bars**: Visually, error margins are largest for OpenVLA (World Model) and smallest for Octo (World Model with OOD input image).
### Interpretation
The data suggests that OOD distractors consistently degrade model performance across all categories. However, the severity of this degradation varies:
- **Octo** is most vulnerable to OOD input, with near-collapse in success rates.
- **OpenVLA** retains higher absolute success rates even after OOD input is introduced, indicating better robustness.
- The inverse correlation implies that OOD distractors act as significant noise sources, particularly in models like Octo that lack adaptive mechanisms to handle such inputs.
The chart highlights the need for OOD-aware training strategies to mitigate these performance drops, especially for models deployed in environments with unpredictable inputs.