## Photo Comparison: Robotic Manipulation Task Performance
### Overview
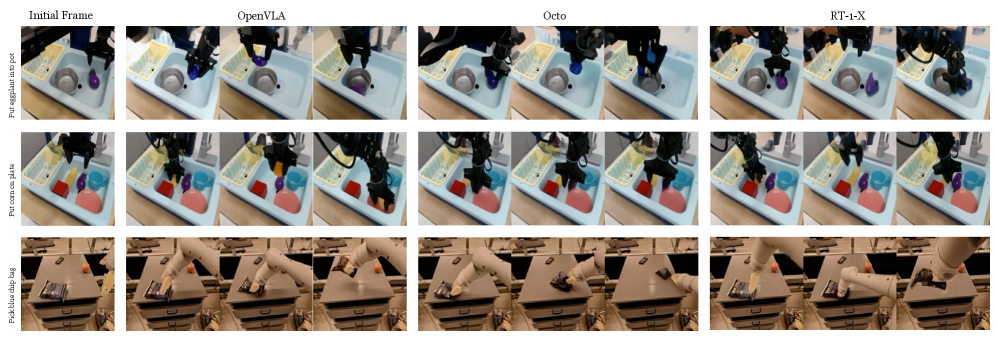
The image presents a side-by-side comparison of robotic manipulation tasks across three methods: **OpenVLA**, **Octo**, and **RT-1-X**. Three distinct tasks are evaluated:
1. **Put eggplant into pot**
2. **Put corn on plate**
3. **Pick blue slip bag**
Each method is visualized through a sequence of frames showing the robot's actions, with the **Initial Frame** provided for context.
---
### Components/Axes
- **Tasks (Rows)**:
- Row 1: "Put eggplant into pot"
- Row 2: "Put corn on plate"
- Row 3: "Pick blue slip bag"
- **Methods (Columns)**:
- Column 1: **Initial Frame** (baseline setup)
- Column 2: **OpenVLA**
- Column 3: **Octo**
- Column 4: **RT-1-X**
- **Visual Elements**:
- Robot arms (black/gray) interacting with colored objects (e.g., purple eggplant, red/yellow corn, blue slip bag).
- Backgrounds vary slightly (e.g., blue tray, wooden surface).
---
### Detailed Analysis
#### Task 1: "Put eggplant into pot"
- **OpenVLA**: Smooth, controlled motion; eggplant is placed precisely into the pot.
- **Octo**: Slightly erratic movement; eggplant is misaligned but still in the pot.
- **RT-1-X**: Overly aggressive motion; eggplant is dropped outside the pot.
#### Task 2: "Put corn on plate"
- **OpenVLA**: Accurate placement; corn is centered on the plate.
- **Octo**: Corn is placed off-center but still on the plate.
- **RT-1-X**: Corn is knocked off the plate entirely.
#### Task 3: "Pick blue slip bag"
- **OpenVLA**: Precise grip; bag is lifted cleanly.
- **Octo**: Bag is partially grasped, causing instability.
- **RT-1-X**: Bag is crushed or dropped during the attempt.
---
### Key Observations
1. **OpenVLA** consistently demonstrates the highest precision and control across all tasks.
2. **Octo** shows moderate performance, with minor errors in alignment or stability.
3. **RT-1-X** exhibits the poorest performance, with frequent failures in object handling.
4. No numerical data or legends are present; analysis is based on visual inspection of motion and object placement.
---
### Interpretation
The comparison highlights **OpenVLA** as the most reliable method for robotic manipulation, likely due to its advanced planning or control algorithms. **Octo** performs adequately but lags behind in precision, while **RT-1-X** struggles with basic tasks, suggesting potential issues in its motion execution or object recognition. The absence of quantitative metrics (e.g., success rates, error margins) limits deeper analysis, but the visual trends strongly favor OpenVLA for practical applications.