## Photograph: Urban Scene with Object Detection Annotations
### Overview
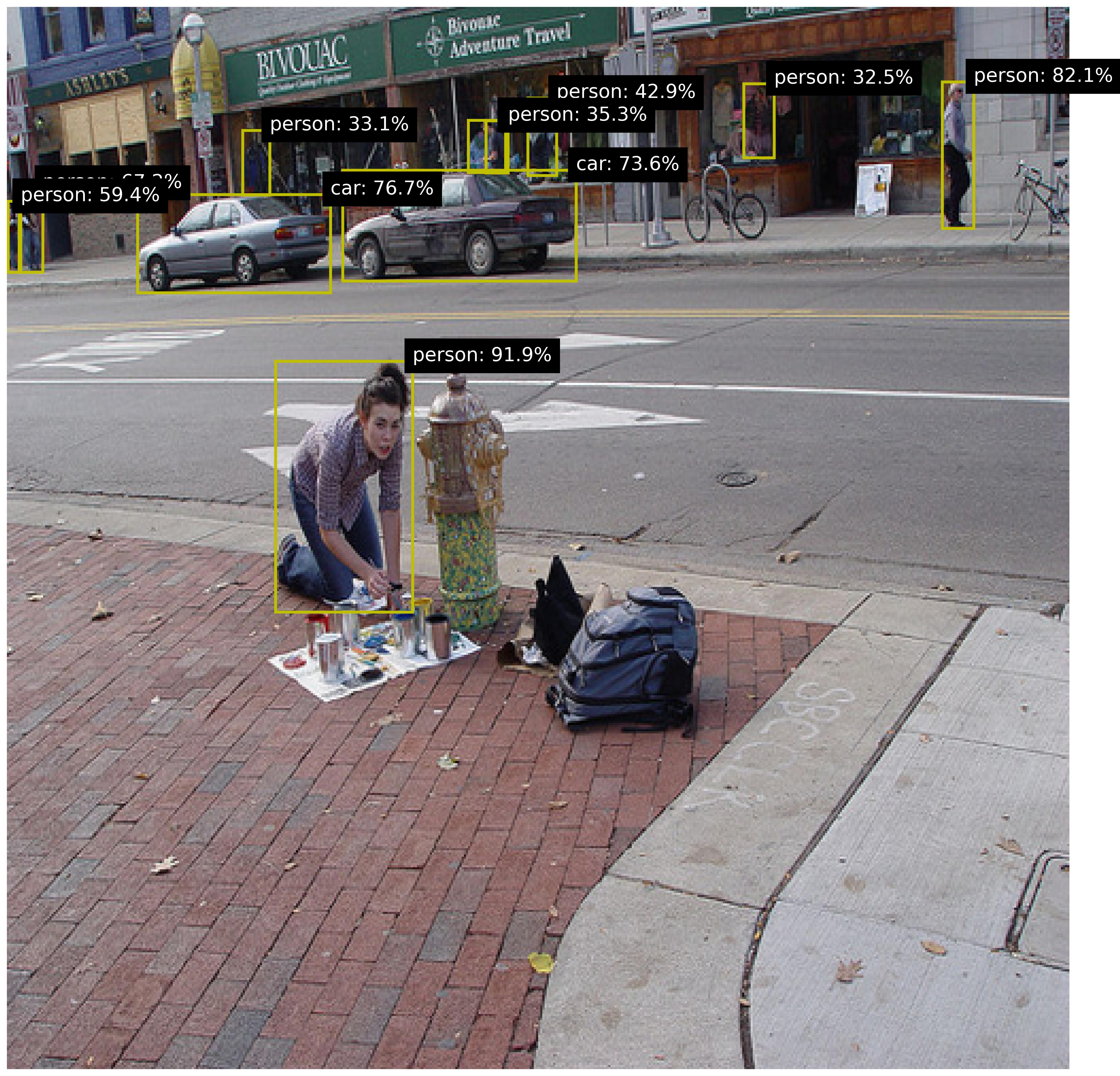
The image depicts a street scene with a person painting on a brick sidewalk, annotated with object detection labels. The scene includes pedestrians, vehicles, storefronts, and urban infrastructure. Yellow bounding boxes with confidence percentages are overlaid on detected objects.
### Components/Axes
- **Foreground**: A person painting (labeled "person: 91.9%") kneeling on a brick sidewalk.
- **Midground**:
- A fire hydrant with a floral pattern.
- A backpack and painting supplies (paint cans, brushes).
- **Background**:
- Two cars (labeled "car: 76.7%" and "car: 73.6%").
- Pedestrians (labeled "person: 33.1%", "person: 42.9%", "person: 35.3%", "person: 32.5%", "person: 82.1%").
- Storefronts: "BIVOUAC" (green sign), "Bivonic Adventure Travel" (green sign), and "ASHLEY'S" (yellow sign).
- Bicycles parked near the sidewalk.
### Detailed Analysis
- **Foreground Person**:
- Positioned centrally on the brick sidewalk.
- Confidence: 91.9% (highest in the image).
- **Cars**:
- Left car: 76.7% confidence.
- Right car: 73.6% confidence.
- **Pedestrians**:
- Person near "Bivonic Adventure Travel": 42.9% confidence.
- Person near "ASHLEY'S": 32.5% confidence (lowest).
- Person near fire hydrant: 35.3% confidence.
- Person on the far right: 82.1% confidence.
- **Annotations**:
- All labels use black text on yellow boxes.
- Percentages likely represent model confidence scores.
### Key Observations
1. **Confidence Variance**:
- Foreground objects (painter, fire hydrant) have higher confidence (91.9%, 82.1%).
- Background objects (pedestrians, cars) show lower confidence (32.5%–76.7%).
2. **Occlusion/Visibility**:
- The person near "ASHLEY'S" (32.5%) is partially obscured by a bicycle.
- The fire hydrant’s floral pattern may reduce detection accuracy.
3. **Spatial Distribution**:
- Annotations cluster near the center and right side of the image.
### Interpretation
The annotations suggest this image was processed by an object detection model (e.g., YOLO, Faster R-CNN) to identify pedestrians and vehicles. The confidence scores indicate:
- **Foreground Dominance**: Objects closer to the camera (painter, fire hydrant) are detected with higher certainty.
- **Background Challenges**: Distant or occluded objects (e.g., pedestrian near "ASHLEY'S") have lower confidence, highlighting limitations in handling depth and occlusion.
- **Model Bias**: The high confidence for the painter (91.9%) may reflect clear, unobstructed features, while lower scores for background pedestrians suggest difficulty in distinguishing individuals in cluttered environments.
This analysis underscores the importance of spatial context and object visibility in computer vision tasks, with implications for applications like autonomous driving or surveillance systems.