## Diagram: Robot Navigation Scenarios
### Overview
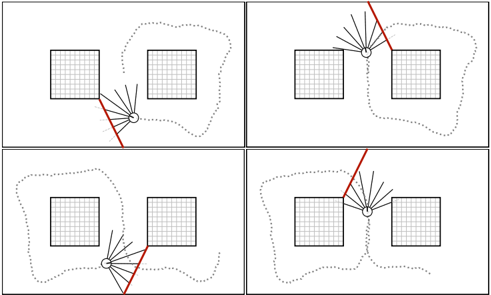
The image presents four scenarios of a robot navigating a space with two square obstacles. Each scenario shows the robot's position, its sensor readings (represented by lines radiating from the robot), a red line indicating a collision risk, and a dotted line representing the robot's path.
### Components/Axes
* **Robot:** Represented by a small circle with a face.
* **Obstacles:** Two square blocks with a grid pattern inside.
* **Sensor Readings:** Black lines radiating from the robot, indicating the robot's perception of its surroundings.
* **Collision Risk:** A red line indicating a potential collision path.
* **Robot Path:** A dotted gray line showing the robot's movement trajectory.
### Detailed Analysis
The image is divided into four quadrants, each depicting a different scenario:
* **Top-Left:** The robot is positioned between the two obstacles, closer to the left obstacle. The red line indicates a collision risk with the left obstacle. The robot's path starts from the bottom-right and curves around the obstacles.
* **Top-Right:** The robot is positioned between the two obstacles, closer to the right obstacle. The red line indicates a collision risk with the right obstacle. The robot's path starts from the bottom-left and curves around the obstacles.
* **Bottom-Left:** The robot is positioned between the two obstacles, closer to the left obstacle. The red line indicates a collision risk with the left obstacle. The robot's path starts from the top-right and curves around the obstacles.
* **Bottom-Right:** The robot is positioned between the two obstacles, closer to the right obstacle. The red line indicates a collision risk with the right obstacle. The robot's path starts from the top-left and curves around the obstacles.
In each scenario, the robot's sensors detect the obstacles, and the red line highlights the direction where a collision is most likely if the robot continues on its current trajectory. The dotted line shows how the robot avoids the obstacles by adjusting its path.
### Key Observations
* The robot consistently avoids collisions by altering its path based on sensor data.
* The red line accurately predicts potential collision paths.
* The robot's path is smooth and avoids sharp turns.
### Interpretation
The diagram illustrates a basic collision avoidance system for a robot navigating a simple environment. The robot uses its sensors to detect obstacles and adjusts its path to avoid collisions. The red line serves as a visual indicator of potential dangers, allowing the robot to make informed decisions about its movement. The scenarios demonstrate the robot's ability to navigate different configurations of obstacles, highlighting the robustness of the collision avoidance system.