\n
## Screenshot: Robotic Assistance - Task Options
### Overview
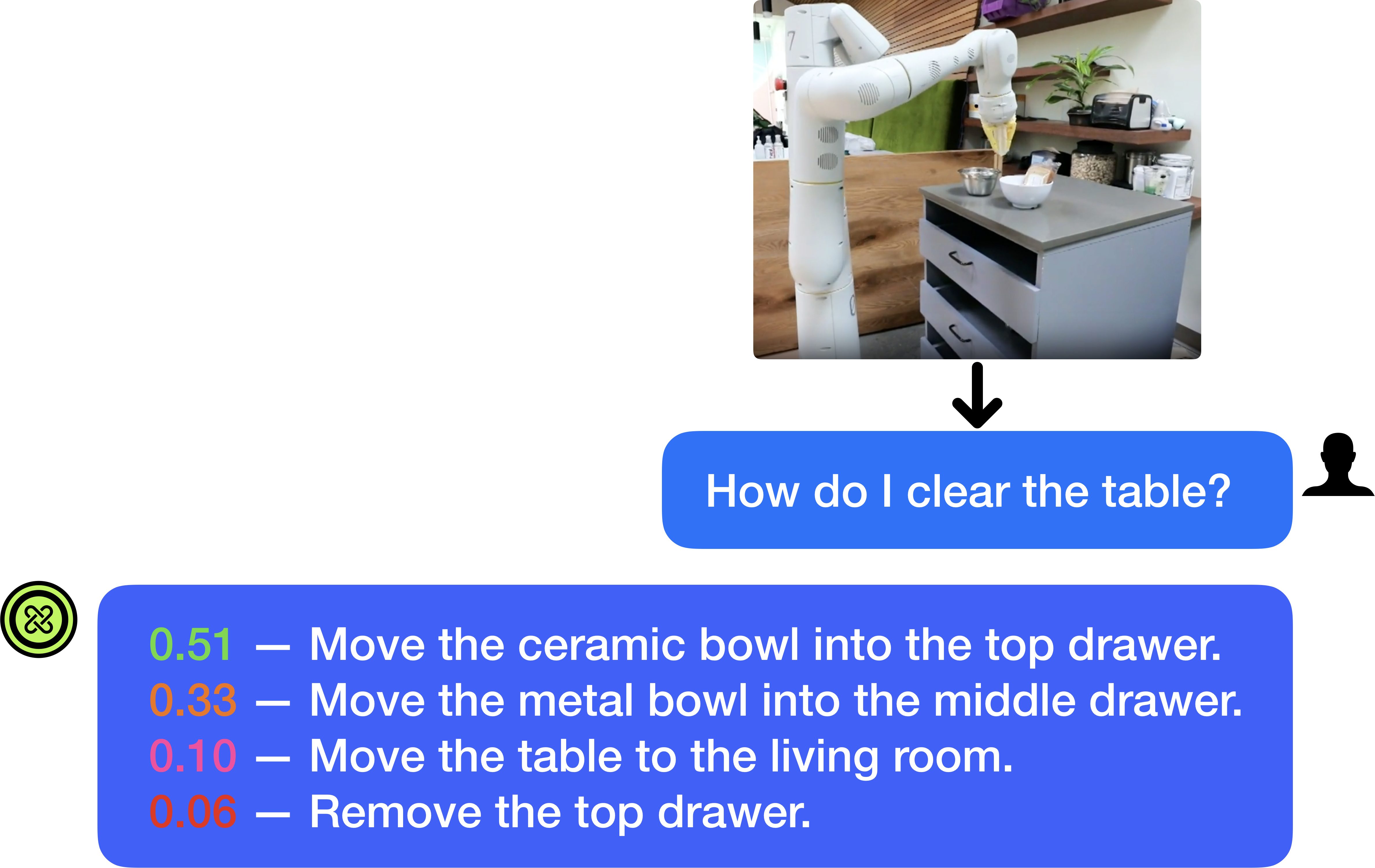
The image depicts a screenshot of a robotic arm positioned over a table cluttered with objects. Below the image is a speech bubble containing a user query ("How do I clear the table?") and a list of suggested actions with associated confidence scores. The overall impression is a demonstration of a robotic assistant responding to a natural language command.
### Components/Axes
The image contains the following elements:
* **Robotic Arm:** A yellow robotic arm with multiple joints.
* **Table:** A wooden table with various objects on it (bowls, containers, etc.).
* **Arrow:** A downward-pointing arrow indicating interaction or focus.
* **Speech Bubble:** A blue speech bubble containing the text "How do I clear the table?".
* **Action List:** A light blue rectangular box containing a list of suggested actions and their associated confidence scores.
* **User Icon:** A small icon representing a user, positioned to the right of the speech bubble.
* **Swirl Icon:** A small swirl icon positioned to the left of the action list.
### Detailed Analysis or Content Details
The action list presents four suggested actions with corresponding confidence scores:
1. **0.51** – Move the ceramic bowl into the top drawer.
2. **0.33** – Move the metal bowl into the middle drawer.
3. **0.10** – Move the table to the living room.
4. **0.06** – Remove the top drawer.
The confidence scores are represented as decimal values between 0 and 1, indicating the system's certainty about the relevance of each action to the user's query. The actions are listed in descending order of confidence.
### Key Observations
* The system demonstrates an understanding of the objects on the table ("ceramic bowl", "metal bowl").
* The confidence scores suggest that the system is most confident in the first two actions (moving the bowls).
* The action "Move the table to the living room" has a significantly lower confidence score, indicating it is less likely to be the user's intention.
* The action "Remove the top drawer" has the lowest confidence score.
### Interpretation
The image demonstrates a robotic system capable of interpreting natural language commands and suggesting relevant actions. The confidence scores provide a measure of the system's uncertainty, allowing it to prioritize actions and potentially ask for clarification if needed. The system appears to be focused on object manipulation within the immediate environment (the table and drawers) rather than broader actions like moving the entire table. The descending order of confidence scores suggests a probabilistic reasoning process, where the system ranks actions based on their likelihood of fulfilling the user's intent. The system is likely using computer vision to identify the objects on the table and natural language processing to understand the user's query. The relatively low confidence in actions beyond object manipulation suggests the system's current capabilities are limited to tasks within a defined scope.