## Diagram: Closed-loop online planning system
### Overview
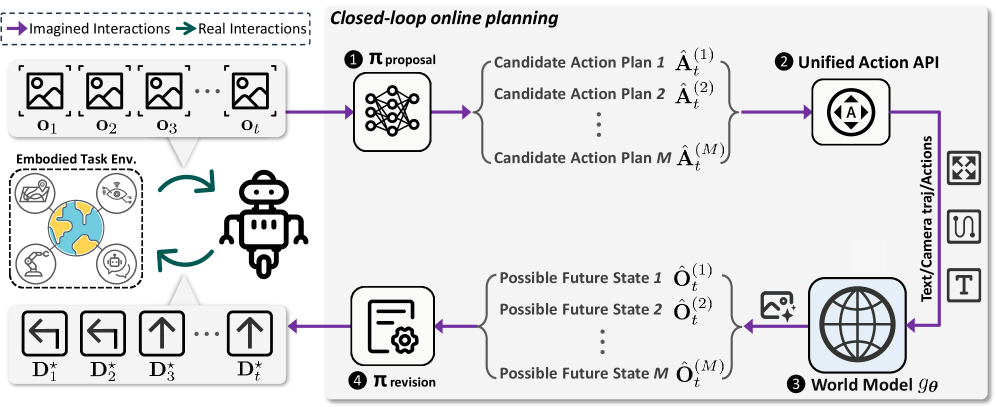
The diagram illustrates a closed-loop online planning framework for robotic systems, showing the flow from environmental observations to action execution and future state prediction. It emphasizes iterative planning through a world model and unified action API.
### Components/Axes
1. **Embedded Task Environment**
- Contains icons representing:
- Robot (central figure)
- Earth (global context)
- Camera (observation)
- Speech bubble (communication)
- Robot arm (manipulation)
- Observations labeled: O₁, O₂, O₃, ..., Oₜ (temporal sequence)
2. **Closed-loop online planning**
- **π proposal**: Network diagram with interconnected nodes
- **Candidate Action Plans**: Aₜ^(1) to Aₜ^(M) (multiple action options)
- **Unified Action API**: Standardized action interface (↑↓↙↘ symbols)
- **π revision**: Settings gear icon with revision process
- **Possible Future States**: Oₜ^(1) to Oₜ^(M) (predicted outcomes)
- **World Model**: Globe icon (gθ) representing environmental understanding
3. **Flow Connections**
- Purple arrows show process flow:
- Observations → π proposal → Candidate actions → Unified API → World Model → Future states → π revision
- Dashed purple arrows indicate "Imagined Interactions" vs "Real Interactions"
### Detailed Analysis
- **Observation Sequence**: O₁ to Oₜ shows temporal progression of environmental inputs
- **Action Planning**: Multiple candidate actions (Aₜ^(1) to Aₜ^(M)) suggest probabilistic planning
- **World Model Function**: Takes text/camera data and actions to predict future states
- **Iterative Process**: Feedback loop from future states back to π revision
### Key Observations
1. The system maintains multiple candidate actions (M options) at each time step
2. Future states are predicted probabilistically (Oₜ^(1) to Oₜ^(M))
3. The world model integrates multiple data types (text, camera, actions)
4. Planning occurs in discrete time steps (temporal index t)
5. The unified action API standardizes action representation across systems
### Interpretation
This diagram demonstrates a sophisticated robotic planning system that:
1. Continuously updates its understanding of the environment through observations
2. Generates multiple potential action plans at each step
3. Uses a world model to predict outcomes of actions
4. Iteratively refines its planning strategy based on predicted futures
The closed-loop nature suggests the system can adapt to changing environments by:
- Revising plans based on predicted state outcomes
- Maintaining multiple action options to handle uncertainty
- Standardizing actions through the Unified API for system compatibility
The emphasis on multiple future states (M options) indicates a probabilistic approach to decision-making, likely using Monte Carlo methods or similar techniques to explore possible outcomes. The integration of text and camera data suggests multimodal perception capabilities, while the robot arm icon implies physical interaction with the environment.