## Diagram: Proof Trees and Relevance Proof Propagation
### Overview
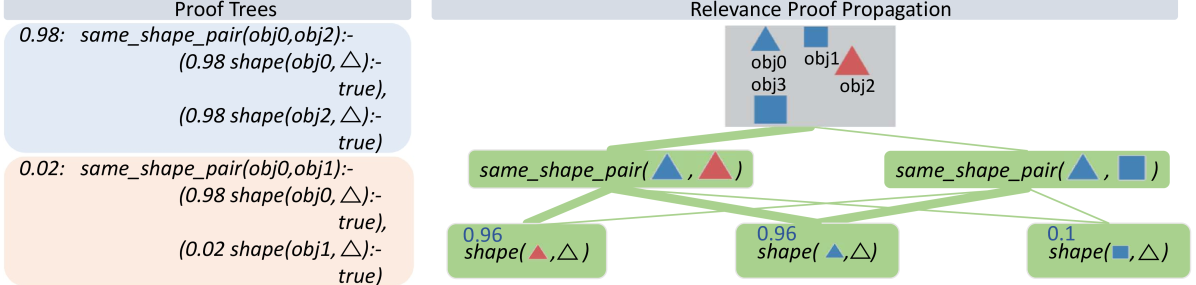
The image presents two distinct sections: **Proof Trees** (left) and **Relevance Proof Propagation** (right). The left section contains hierarchical proof trees with probabilistic values and function calls, while the right section illustrates how relevance is propagated between objects based on shape similarity.
### Components/Axes
#### Proof Trees (Left)
- **Structure**: Two proof trees, one in **blue** (high confidence) and one in **orange** (low confidence).
- **Root Nodes**:
- **Blue Tree**:
- Label: `same_shape_pair(obj0, obj2)`
- Probability: `0.98`
- Child Nodes:
- `shape(obj0, △)` with probability `0.98` (returns `true`)
- `shape(obj2, △)` with probability `0.98` (returns `true`)
- **Orange Tree**:
- Label: `same_shape_pair(obj0, obj1)`
- Probability: `0.02`
- Child Nodes:
- `shape(obj0, △)` with probability `0.98` (returns `true`)
- `shape(obj1, △)` with probability `0.02` (returns `true`)
#### Relevance Proof Propagation (Right)
- **Objects**:
- `obj0` (blue triangle), `obj1` (red triangle), `obj2` (blue square), `obj3` (blue square).
- **Nodes**:
- `same_shape_pair(△, △)` with probability `0.96`
- `same_shape_pair(△, □)` with probability `0.1`
- `same_shape_pair(△, △)` with probability `0.96`
- **Connections**:
- Lines link nodes via the `shape()` function, indicating relationships between objects.
- **Legend**:
- Blue triangle: `obj0`
- Red triangle: `obj1`
- Blue square: `obj2` and `obj3`
### Detailed Analysis
#### Proof Trees
- **Blue Tree**:
- High confidence (`0.98`) in `same_shape_pair(obj0, obj2)`.
- Both child nodes (`shape(obj0, △)` and `shape(obj2, △)`) confirm the shape is triangular with high probability.
- **Orange Tree**:
- Low confidence (`0.02`) in `same_shape_pair(obj0, obj1)`.
- Child node `shape(obj1, △)` has a low probability (`0.02`), suggesting uncertainty about `obj1`'s shape.
#### Relevance Proof Propagation
- **Nodes**:
- `same_shape_pair(△, △)` (probability `0.96`): High confidence in similarity between triangles (e.g., `obj0` and `obj1`).
- `same_shape_pair(△, □)` (probability `0.1`): Low confidence in similarity between triangle and square (e.g., `obj0` and `obj2`).
- `same_shape_pair(△, △)` (probability `0.96`): Repeats the high-confidence triangle-triangle pairing.
- **Flow**:
- The `shape()` function propagates relevance between objects. For example, `obj0` (triangle) is linked to `obj1` (triangle) with high confidence, but to `obj2` (square) with low confidence.
### Key Observations
1. **High Confidence in Triangle-Triangle Similarity**:
- `same_shape_pair(△, △)` nodes consistently show `0.96` probability, indicating strong agreement on triangular shapes.
2. **Low Confidence in Triangle-Square Similarity**:
- `same_shape_pair(△, □)` has only `0.1` probability, suggesting minimal relevance between triangles and squares.
3. **Object Relationships**:
- `obj0` (triangle) is strongly linked to `obj1` (triangle) but weakly to `obj2` (square).
- `obj2` and `obj3` (both squares) are not directly compared in the diagram.
### Interpretation
- **Proof Trees**:
- The blue tree confirms `obj0` and `obj2` share the same triangular shape with high confidence. The orange tree, however, shows near-zero confidence in `obj0` and `obj1` sharing the same shape, despite both being triangles. This discrepancy might indicate an error in the orange tree’s logic or a contextual factor (e.g., `obj1` being a different type of triangle).
- **Relevance Propagation**:
- The system prioritizes shape similarity for relevance. Triangles (`obj0`, `obj1`) are highly relevant to each other, while squares (`obj2`, `obj3`) are less relevant to triangles. The low probability for `△-□` pairs suggests the system distinguishes between shapes strictly.
- **Anomalies**:
- The orange tree’s `shape(obj1, △)` node has a low probability (`0.02`) despite `obj1` being a triangle. This could imply a misclassification or a contextual constraint (e.g., `obj1` being a "non-standard" triangle).
- `obj3` (blue square) is included in the legend but not explicitly used in the propagation diagram, raising questions about its role.
### Conclusion
The diagram illustrates a probabilistic framework for determining shape similarity and relevance between objects. High-confidence matches (e.g., triangles) drive relevance, while low-confidence pairs (e.g., triangle-square) are deprioritized. The orange tree’s low confidence in `obj0-obj1` similarity contradicts the high confidence in `obj0-obj2`, highlighting potential inconsistencies or contextual dependencies in the system’s logic.