\n
## Task Sequence: Robot Navigation and Object Manipulation
### Overview
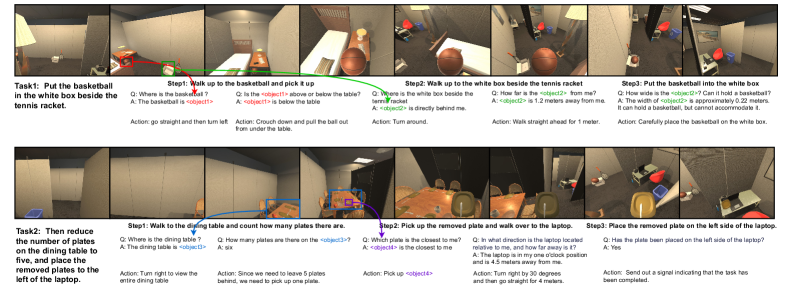
The image presents a sequence of eight screenshots depicting a robot performing a series of tasks in an indoor environment. Each screenshot illustrates a step in the task, accompanied by questions and action descriptions related to robot perception and control. The tasks involve navigating to specific locations, identifying objects, and manipulating them.
### Components/Axes
Each screenshot contains the following elements:
* **Image:** A first-person view from the robot's perspective.
* **Task Title:** A brief description of the overall task. (e.g., "Task 1: Put the basketball in the white box beside the tennis racket.")
* **Step Number:** Indicates the current step in the task sequence. (e.g., "Step 1: Walk up to the basketball and pick it up")
* **Question 1 (Q):** A question about the environment, requiring the robot to identify an object. (e.g., "Q: Where is the basketball?")
* **Answer 1 (A):** The correct answer to the question. (e.g., "A: The basketball is <object>.")
* **Question 2 (Q):** A question about the location of an object relative to the robot. (e.g., "Q: Is <object> above or below the table?")
* **Answer 2 (A):** The correct answer to the question. (e.g., "A: <object> is below the table.")
* **Action:** A description of the robot's action for that step. (e.g., "Action: go straight ahead and turn left.")
* **Highlighting:** Red arrows indicate the path the robot takes, and blue outlines highlight the target object.
### Detailed Analysis or Content Details
**Task 1: Put the basketball in the white box beside the tennis racket.**
* **Step 1:** Robot is facing a basketball. Q: Where is the basketball? A: The basketball is <object>. Q: Is <object> above or below the table? A: <object> is below the table. Action: go straight ahead and turn left.
* **Step 2:** Robot is approaching the basketball. Q: Where is the white box beside the tennis racket? A: The white box beside the tennis racket is directly behind me. Action: Turn around.
* **Step 3:** Robot is walking towards the white box. Q: How far is the <object> from me? A: <object> is 1.2 meters away from me. Action: Walk straight ahead for 1 meter.
* **Step 4:** Robot is placing the basketball in the white box. Q: How wide is the <object>? I can hold a basketball. A: The width of <object> is approximately 0.22 meters. I can hold a basketball. Action: Carefully place the basketball in the white box.
**Task 2: Reduce the number of plates on the dining table to five, and place the removed plates to the left of the laptop.**
* **Step 1:** Robot is facing the dining table. Q: Where is the dining table? A: The dining table is <object>. Q: How many plates are there on the table? A: six. Action: Turn right to view the entire dining table.
* **Step 2:** Robot is looking at the dining table with plates. Q: How many plates are there on the table? A: six. Action: Since we need to leave 5 plates behind, we need to pick up one plate.
* **Step 3:** Robot is approaching a plate. Q: Which plate is the closest to me? A: <object> is the closest to me. Action: Pick up <object>.
* **Step 4:** Robot is turning towards the laptop. Q: In what direction is the laptop located relative to me, and how far away is it? A: The laptop is up and one o'clock position and the 4.5 meters away from me. Action: Turn right by 90 degrees and then go straight for 4 meters.
### Key Observations
* The tasks involve a combination of navigation, object recognition, and manipulation.
* The questions and answers suggest a system for the robot to reason about its environment and actions.
* The use of relative positioning ("above," "below," "directly behind") indicates the robot's ability to understand spatial relationships.
* The action descriptions are simple and direct, suggesting a low-level control interface.
* The highlighting (arrows and outlines) provides visual guidance for the robot's actions.
### Interpretation
The image demonstrates a robotic system designed to perform everyday tasks in a structured environment. The system appears to rely on a combination of visual perception, spatial reasoning, and pre-programmed actions. The questions and answers suggest a form of knowledge representation that allows the robot to understand the relationships between objects and its own actions. The sequence of steps highlights the challenges of robotic task execution, including the need for accurate object recognition, precise navigation, and careful manipulation. The system's ability to answer questions about its environment suggests a level of situational awareness that is crucial for successful task completion. The use of highlighting and simple action descriptions indicates a focus on clarity and ease of control. The tasks themselves are representative of common household chores, suggesting a potential application for this type of robotic system in domestic environments. The system is likely using computer vision to identify objects and estimate distances, and a control algorithm to execute the actions. The overall goal appears to be to create a robot that can autonomously perform tasks in a human-like manner.