## Rendering Comparison: Scaffold-GS, Octree-GS, and Hierarchical-GS
### Overview
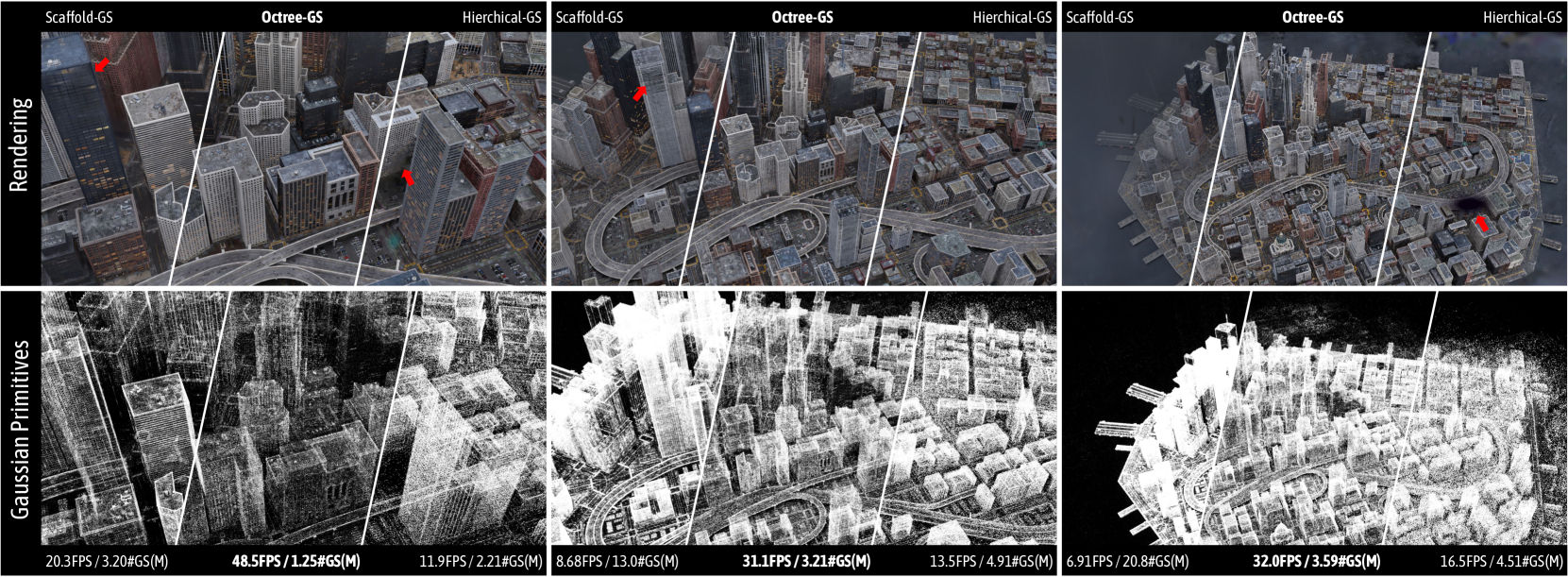
The image presents a comparative analysis of three rendering techniques: Scaffold-GS, Octree-GS, and Hierarchical-GS. The image is divided into two rows. The top row displays rendered images of cityscapes using each of the three techniques. The bottom row shows the corresponding Gaussian Primitive representations. Each column represents a different scene. Performance metrics (FPS and #GS(M)) are provided below each Gaussian Primitive representation.
### Components/Axes
* **Rows:**
* Row 1: Rendering
* Row 2: Gaussian Primitives
* **Columns:** Each set of three columns represents a different scene. Within each set, the columns are:
* Column 1: Scaffold-GS
* Column 2: Octree-GS
* Column 3: Hierarchical-GS
* **Metrics:** Frames Per Second (FPS) and Number of Gaussian Splats in Millions (#GS(M))
### Detailed Analysis or ### Content Details
**Scene 1 (Leftmost Set of Columns):**
* **Rendering (Top Row):**
* **Scaffold-GS:** Shows a cityscape with buildings and roads. A red arrow points to a specific building.
* **Octree-GS:** Shows the same cityscape, rendered with a different technique.
* **Hierarchical-GS:** Shows the same cityscape, rendered with a different technique.
* **Gaussian Primitives (Bottom Row):**
* **Scaffold-GS:** A point cloud representation of the cityscape.
* 20.3 FPS / 3.20 #GS(M)
* **Octree-GS:** A point cloud representation of the cityscape.
* 48.5 FPS / 1.25 #GS(M)
* **Hierarchical-GS:** A point cloud representation of the cityscape.
* 11.9 FPS / 2.21 #GS(M)
**Scene 2 (Middle Set of Columns):**
* **Rendering (Top Row):**
* **Scaffold-GS:** Shows a cityscape with buildings and roads. A red arrow points to a specific building.
* **Octree-GS:** Shows the same cityscape, rendered with a different technique.
* **Hierarchical-GS:** Shows the same cityscape, rendered with a different technique.
* **Gaussian Primitives (Bottom Row):**
* **Scaffold-GS:** A point cloud representation of the cityscape.
* 8.68 FPS / 13.0 #GS(M)
* **Octree-GS:** A point cloud representation of the cityscape.
* 31.1 FPS / 3.21 #GS(M)
* **Hierarchical-GS:** A point cloud representation of the cityscape.
* 13.5 FPS / 4.91 #GS(M)
**Scene 3 (Rightmost Set of Columns):**
* **Rendering (Top Row):**
* **Scaffold-GS:** Shows a cityscape with buildings and roads. A red arrow points to a specific building.
* **Octree-GS:** Shows the same cityscape, rendered with a different technique.
* **Hierarchical-GS:** Shows the same cityscape, rendered with a different technique.
* **Gaussian Primitives (Bottom Row):**
* **Scaffold-GS:** A point cloud representation of the cityscape.
* 6.91 FPS / 20.8 #GS(M)
* **Octree-GS:** A point cloud representation of the cityscape.
* 32.0 FPS / 3.59 #GS(M)
* **Hierarchical-GS:** A point cloud representation of the cityscape.
* 16.5 FPS / 4.51 #GS(M)
### Key Observations
* The Octree-GS method generally achieves higher FPS compared to Scaffold-GS and Hierarchical-GS, especially in the first scene.
* The #GS(M) values vary significantly across the different methods and scenes, indicating different levels of detail or complexity in the Gaussian Splat representations.
* The red arrows in the renderings highlight specific areas of interest within each scene.
### Interpretation
The image provides a visual and quantitative comparison of three Gaussian Splatting rendering techniques. The data suggests that Octree-GS may offer a better balance between rendering speed (FPS) and the number of Gaussian Splats used (#GS(M)) in some scenarios. However, the optimal technique likely depends on the specific scene and desired level of detail. The Gaussian Primitive representations in the bottom row offer insight into how each method distributes and represents the scene's geometry. The red arrows likely indicate areas where the rendering quality or performance of the different methods is being specifically compared.