## Diagram: Robot Interaction System
### Overview
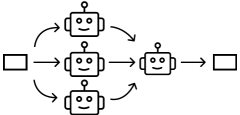
The image depicts a simplified diagram of a robot interaction system with three interconnected robotic units and two terminal nodes. The system features a closed-loop feedback mechanism among the robots and a linear processing path terminating at external nodes.
### Components/Axes
- **Robotic Units**: Three identical robot icons arranged in a triangular formation (top, middle, bottom).
- **Arrows**:
- Clockwise circular arrows connecting the robots (top → middle → bottom → top).
- Linear arrows connecting the middle robot to two rectangular terminal nodes (left and right).
- **Terminal Nodes**: Two blank rectangles positioned at the start and end of the linear path.
### Detailed Analysis
- **Robotic Loop**: The three robots form a closed feedback loop with bidirectional arrows, suggesting continuous interaction or data exchange.
- **Linear Path**: The middle robot acts as a bridge between the feedback loop and the terminal nodes, with unidirectional arrows indicating a one-way flow toward the terminals.
- **Terminal Nodes**: No labels or identifiers are present on the rectangles, leaving their purpose ambiguous.
### Key Observations
1. The system emphasizes cyclical collaboration among the robots.
2. The linear path introduces asymmetry, directing output from the middle robot to external systems.
3. No explicit labels or legends clarify the function of components or data flow semantics.
### Interpretation
This diagram likely represents a distributed system where:
- The robotic loop symbolizes a self-sustaining subsystem (e.g., coordination, resource sharing).
- The linear path suggests a processing pipeline feeding results to external systems (e.g., user interfaces, storage).
- The absence of labels implies the diagram is conceptual, focusing on structural relationships rather than specific functionalities.
The design prioritizes modularity, with the middle robot serving as a critical junction between cyclical and linear processes. Potential applications include workflow automation, distributed computing, or human-robot interaction frameworks.