## Screenshot: Robotic Arm Task Execution Sequence
### Overview
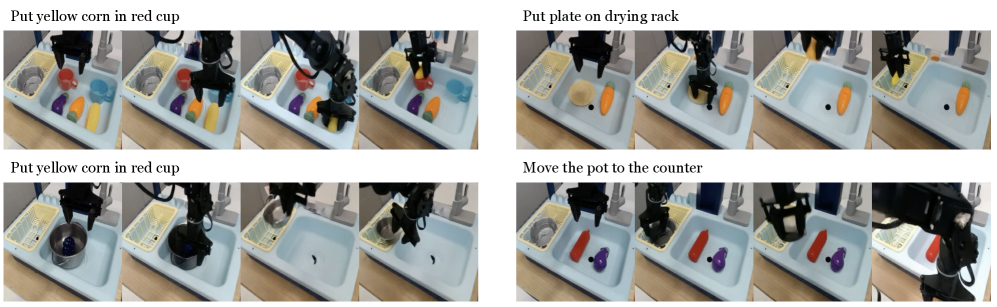
The image displays six sequential panels demonstrating a robotic arm performing household tasks in a simulated kitchen environment. Each panel includes a caption describing the action, followed by three sub-images showing the robot's motion and object manipulation.
### Components/Axes
- **Panels**: Four main panels, each with a caption and three sub-images.
1. **Panel 1**: "Put yellow corn in red cup"
2. **Panel 2**: "Put plate on drying rack"
3. **Panel 3**: "Put yellow corn in red cup" (repeated task)
4. **Panel 4**: "Move the pot to the counter"
- **Objects**:
- Yellow corn, red cup, purple/blue/green objects (possibly toys or containers), orange carrot, white plate, silver pot, drying rack, counter.
- **Robot Arm**: Black mechanical arm with a gripper, interacting with objects in each panel.
### Detailed Analysis
#### Panel 1: "Put yellow corn in red cup"
- **Sub-images**:
1. Robot arm approaches yellow corn and red cup.
2. Gripper picks up yellow corn.
3. Corn is placed into the red cup.
- **Key Details**:
- Yellow corn is initially on the counter.
- Red cup is positioned near the sink.
- Robot successfully transfers the corn.
#### Panel 2: "Put plate on drying rack"
- **Sub-images**:
1. Robot arm picks up the white plate from the sink.
2. Plate is moved toward the drying rack.
3. Plate is placed on the drying rack.
- **Key Details**:
- Plate is initially in the sink.
- Drying rack is located to the right of the sink.
#### Panel 3: "Put yellow corn in red cup" (repeated)
- **Sub-images**:
1. Robot arm picks up yellow corn from the sink (now empty).
2. Corn is transferred to the red cup.
3. Final placement in the red cup.
- **Key Details**:
- Yellow corn is now in the sink (from prior task).
- Red cup remains in the same position.
#### Panel 4: "Move the pot to the counter"
- **Sub-images**:
1. Robot arm lifts the silver pot from the sink.
2. Pot is moved horizontally across the counter.
3. Pot is placed on the counter near the drying rack.
- **Key Details**:
- Pot is initially in the sink.
- Counter is the workspace area.
### Key Observations
1. **Repetition**: The task "Put yellow corn in red cup" appears twice, suggesting a test of consistency or error handling.
2. **Object Relocation**: Objects (corn, plate, pot) are moved between the sink, counter, and drying rack, indicating spatial reasoning.
3. **Gripper Precision**: The robot’s gripper successfully handles objects of varying shapes (corn, plate, pot).
### Interpretation
The sequence demonstrates a robotic system’s ability to execute multi-step household tasks with precision. The repetition of the corn-cup task may test reliability or adaptability to minor environmental changes (e.g., corn location). The use of a drying rack and counter highlights the robot’s integration into a functional kitchen workflow. No numerical data or anomalies are visible; the focus is on task completion accuracy.