## Grid of Robot Arm Interaction Scenarios
### Overview
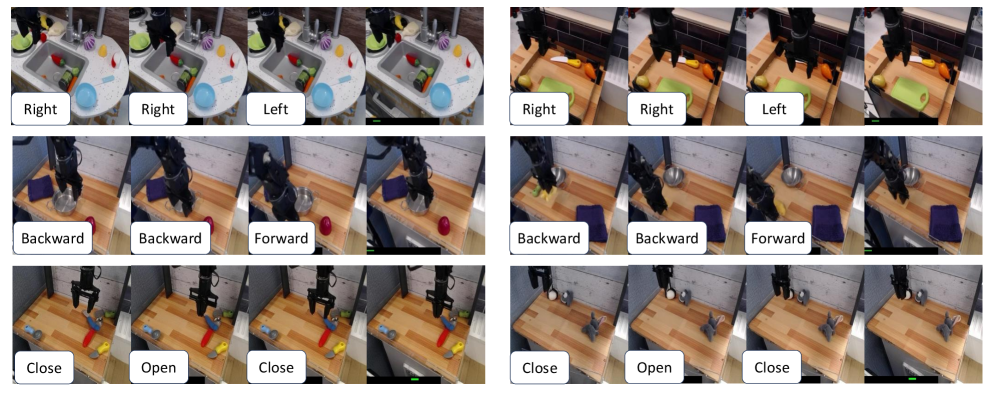
The image displays a 4x3 grid of photographs (12 total) showing a robotic arm interacting with objects in various spatial configurations. Each image is labeled with directional or operational terms ("Right," "Left," "Backward," "Forward," "Close," "Open") to indicate the robot's movement or action. The scenes appear to be part of a controlled experiment or demonstration of robotic manipulation capabilities.
### Components/Axes
- **Grid Structure**:
- 4 rows, 3 columns
- Each cell contains a labeled photograph
- **Labels**:
- **Top Row**: "Right" (x2), "Left"
- **Second Row**: "Backward" (x2), "Forward"
- **Third Row**: "Close" (x2), "Open"
- **Fourth Row**: "Close" (x2), "Open"
- **Visual Elements**:
- Robotic arm (black, industrial-style) in all images
- Objects:
- Kitchen items (sink, fruits, bowls) in top row
- Tools (wrenches, pliers) in bottom rows
- Purple fabric and metallic spheres in middle rows
- Backgrounds vary slightly (kitchen counter, wooden surface, gray backdrop)
### Detailed Analysis
1. **Top Row (Spatial Directions)**:
- **Right**: Robot arm positioned to the right of a sink with fruits and bowls.
- **Right**: Similar setup but with slight positional adjustment of the arm.
- **Left**: Arm shifted to the left side of the sink area.
2. **Second Row (Movement Directions)**:
- **Backward**: Arm retracting from a wooden surface with a purple fabric.
- **Backward**: Arm further retracted, revealing a metallic sphere.
- **Forward**: Arm extended toward a metallic sphere on the surface.
3. **Third Row (Object Interaction)**:
- **Close**: Arm approaching a set of tools (wrenches, pliers) on a wooden surface.
- **Open**: Arm grasping a tool, with visible tool separation.
- **Close**: Arm returning to the tool set.
4. **Fourth Row (Repetition)**:
- Mirrors the third row: "Close," "Open," "Close" sequence with identical tool configurations.
### Key Observations
- **Repetition**: Labels "Close" and "Open" appear twice in the final two rows, suggesting a focus on grasping mechanics.
- **Spatial Consistency**: Directional labels ("Right," "Left," "Backward," "Forward") are paired with consistent object placements, implying controlled testing of movement precision.
- **Object Variety**: Tools, kitchen items, and abstract objects (fabric, spheres) indicate testing across different interaction scenarios.
### Interpretation
This grid likely demonstrates a robotic system's ability to:
1. Navigate spatial directions (left/right, forward/backward)
2. Manipulate objects at varying distances ("Close"/"Open")
3. Adapt to different object types (tools, kitchenware, abstract items)
The repetition of "Close"/"Open" in the final rows emphasizes precision in grasping, while the directional labels in earlier rows test positional awareness. The use of diverse objects suggests the system is being evaluated for versatility in real-world applications. No numerical data or quantitative metrics are visible, so conclusions are based on qualitative observation of movement patterns and object interactions.