## Screenshot: Robotic Arm Task Execution
### Overview
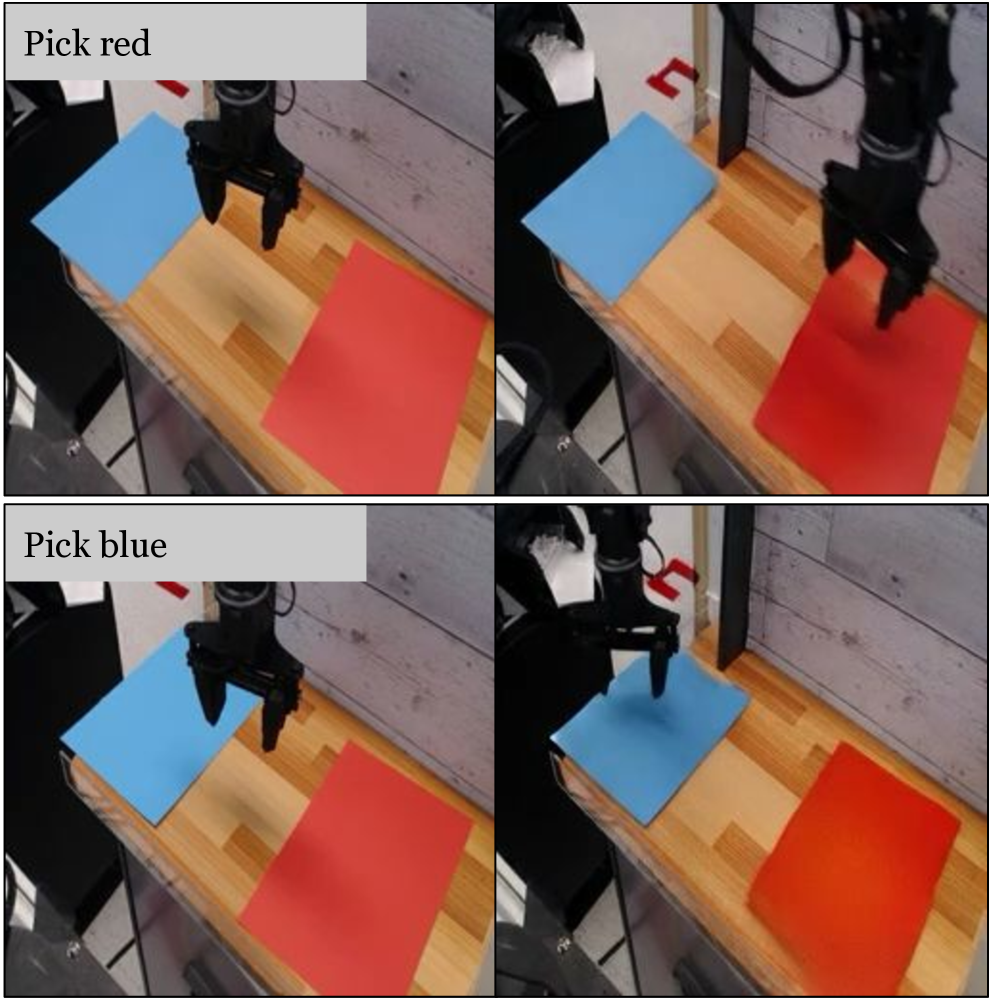
The image depicts a robotic arm interacting with colored squares (red and blue) on a wooden surface. The scene is divided into four quadrants, each showing the robot arm in different positions. Text labels ("Pick red" and "Pick blue") are overlaid in the top-left corners of the top-left and bottom-left quadrants, respectively.
### Components/Axes
- **Labels**:
- "Pick red" (top-left quadrant, white text on gray background)
- "Pick blue" (bottom-left quadrant, white text on gray background)
- **Objects**:
- Robotic arm (black, with visible joints and grippers)
- Red square (bottom-right quadrant, solid red)
- Blue square (top-left quadrant, solid blue)
- **Background**:
- Wooden surface (light brown, textured)
- Gray wall (textured, with a red "L"-shaped object in the top-right corner)
### Detailed Analysis
1. **Top-Left Quadrant**:
- Label: "Pick red" (positioned at top-left corner).
- Robotic arm is positioned above the blue square, not the red square.
- Blue square is stationary; red square is in the bottom-right quadrant.
2. **Bottom-Left Quadrant**:
- Label: "Pick blue" (positioned at top-left corner).
- Robotic arm is positioned above the blue square, aligning with the label.
- Blue square is stationary; red square is in the bottom-right quadrant.
3. **Top-Right Quadrant**:
- No label.
- Robotic arm is positioned above the red square, but no explicit instruction is provided.
4. **Bottom-Right Quadrant**:
- No label.
- Robotic arm is positioned above the red square, but no explicit instruction is provided.
### Key Observations
- The labels "Pick red" and "Pick blue" are spatially isolated to their respective quadrants but do not align with the robot arm's position in those quadrants.
- The robot arm's movement suggests it is executing tasks based on the labels, but the alignment between labels and actions is inconsistent (e.g., "Pick red" is in the top-left quadrant, but the robot is above the blue square there).
- The red and blue squares are fixed in their positions across all quadrants, indicating a static environment.
### Interpretation
The image demonstrates a robotic arm performing color-based tasks, but the labels and robot positions are misaligned. This could imply:
1. **Conditional Logic**: The robot may be testing or simulating task execution based on labels, even if the physical position does not match the instruction.
2. **Error in Task Sequencing**: The labels might be placeholders for a larger system where the robot dynamically adjusts its target based on real-time input.
3. **Visualization of Decision-Making**: The labels could represent hypothetical scenarios, with the robot's position reflecting its "decision" to pick a color despite the label's location.
The absence of additional text or data suggests this is a simplified demonstration of robotic task execution, emphasizing color recognition and movement control.