## Diagram: Robot Network Architecture
### Overview
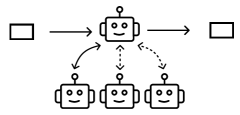
The diagram illustrates a hierarchical robot network with directional flow between components. A central robot node connects to three subordinate robots, which in turn interface with external systems represented by rectangles. Arrows indicate data or control flow, with distinct styles differentiating connection types.
### Components/Axes
- **Nodes**:
- 1 central robot (top position)
- 3 subordinate robots (bottom row)
- 2 external system rectangles (left and right edges)
- **Arrows**:
- Solid arrows: Direct connections (central → right rectangle, subordinate robots → right rectangle)
- Dashed arrows: Indirect/optional connections (central → subordinate robots)
- **Spatial Layout**:
- Central robot: Top-center
- Subordinate robots: Bottom row, evenly spaced
- Rectangles: Left and right edges, aligned with flow direction
### Detailed Analysis
1. **Central Robot**:
- Receives input from left rectangle via solid arrow
- Distributes control to three subordinate robots via dashed arrows
- Sends consolidated output to right rectangle via solid arrow
2. **Subordinate Robots**:
- Each receives input from central robot (dashed arrows)
- Each sends output to right rectangle (solid arrows)
- No inter-robot connections depicted
3. **External Systems**:
- Left rectangle: Input source for central robot
- Right rectangle: Output destination for central robot and all subordinate robots
### Key Observations
- Centralized control architecture with distributed processing
- Solid arrows represent mandatory/primary pathways
- Dashed arrows suggest secondary/optional communication channels
- Right rectangle acts as both input (from central) and output (from all robots) node
### Interpretation
This diagram likely represents a distributed processing system where:
1. A central controller (top robot) orchestrates tasks
2. Subordinate robots perform parallel processing
3. Results are aggregated back to a central output system
4. The dashed arrows may indicate fallback mechanisms or optional data sharing
The architecture suggests redundancy in output pathways (multiple robots feeding the right rectangle) while maintaining single-point input control. The use of dashed arrows for downward connections implies potential for future expansion or conditional routing.