## Image Set: Robotic Arm Tasks
### Overview
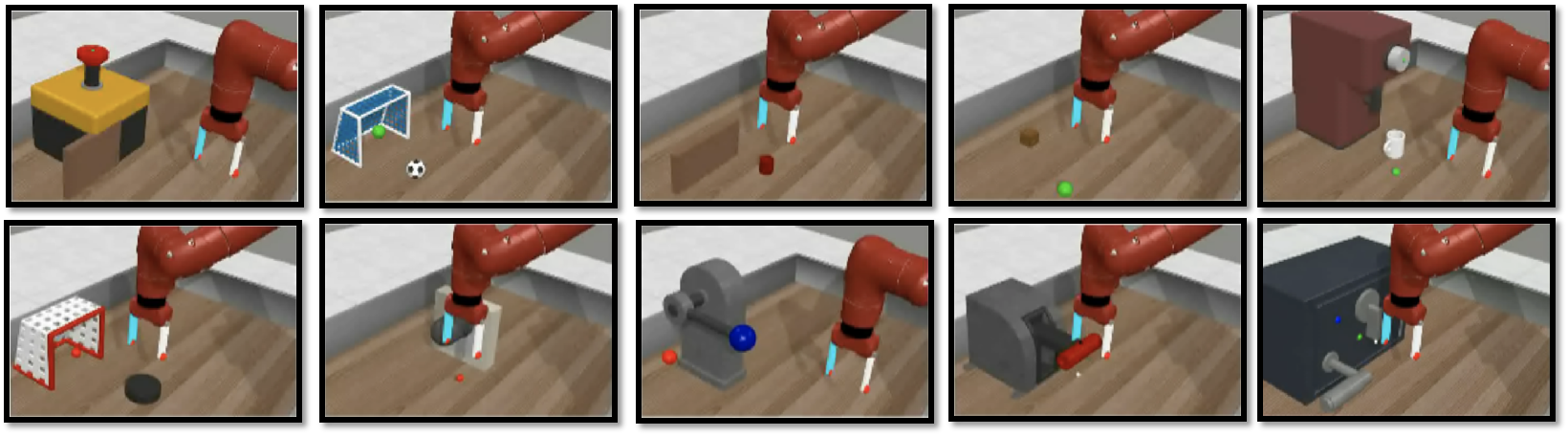
The image shows a series of ten simulated environments where a robotic arm is performing different tasks. Each environment features a different object or set of objects that the arm interacts with. The arm itself is a reddish-brown color with a white and light blue gripper. The environments are simple, with a light-colored floor and walls.
### Components/Axes
Each of the ten images contains the following key components:
* **Robotic Arm:** A reddish-brown robotic arm with a white and light blue gripper.
* **Environment:** A simulated environment with a light-colored floor and walls.
* **Objects:** Various objects that the arm interacts with, such as a button, soccer ball, blocks, and tools.
### Detailed Analysis or ### Content Details
Here's a breakdown of each of the ten environments:
1. **Top-Left:** A yellow box with a red button on top, a brown barrier, and the robotic arm approaching.
2. **Top-Center-Left:** A blue and white soccer goal with a green ball inside and a black and white soccer ball outside. The robotic arm is positioned to interact with the balls.
3. **Top-Center:** A small red rectangular prism and a larger brown rectangular prism. The robotic arm is positioned to interact with the red prism.
4. **Top-Center-Right:** A brown cylinder and a green ball. The robotic arm is positioned to interact with the ball.
5. **Top-Right:** A brown box with a white knob and a white mug. A green ball is on the floor. The robotic arm is positioned to interact with the mug.
6. **Bottom-Left:** A white and red goal with a red ball inside and a black puck outside. The robotic arm is positioned to interact with the puck.
7. **Bottom-Center-Left:** A clear rectangular prism and two red balls. The robotic arm is positioned to interact with the balls.
8. **Bottom-Center:** A gray vise with a blue ball in the vise and a red ball on the floor. The robotic arm is positioned to interact with the vise.
9. **Bottom-Center-Right:** A gray box with a red cylinder on top. The robotic arm is positioned to interact with the cylinder.
10. **Bottom-Right:** A dark gray safe with a silver handle, a blue button, and a green light. The robotic arm is positioned to interact with the safe.
### Key Observations
* The robotic arm is consistent across all environments.
* The objects and tasks vary significantly, suggesting a range of capabilities being tested.
* The environments are simple and uncluttered, focusing attention on the task at hand.
### Interpretation
The image set likely represents a series of tests or demonstrations of a robotic arm's ability to interact with different objects and perform various tasks. The variety of objects and tasks suggests that the arm is designed to be versatile and adaptable. The simple environments allow for a clear focus on the arm's performance without distractions. The tasks range from simple manipulation (picking up a ball) to more complex interactions (operating a vise or safe), indicating a range of potential applications.